Você também pode gostar
- Detox Florescer - 10 DiasDocumento12 páginasDetox Florescer - 10 DiasCRISTINA100% (3)
- Apostila Exercício Prático Contabilidade Aplicada Ao Setor Público Zjqofg1Documento50 páginasApostila Exercício Prático Contabilidade Aplicada Ao Setor Público Zjqofg1Samara Veloso SaraivaAinda não há avaliações
- Cultura Mocambicana Trabalho-11-1Documento13 páginasCultura Mocambicana Trabalho-11-1Helton sitoeAinda não há avaliações
- YORI e YORIMÁDocumento5 páginasYORI e YORIMÁWender MirandaAinda não há avaliações
- Catálogo Ananda TelhasDocumento8 páginasCatálogo Ananda TelhasMavMirandaAinda não há avaliações
- Eduardo Mascarenhas - Alcoolismo, Drogas e Grupos de Ajuda Mútua - Alcoólicos Anônimos, Narcóticos Anônimos, Outros-Self-Published (1993)Documento29 páginasEduardo Mascarenhas - Alcoolismo, Drogas e Grupos de Ajuda Mútua - Alcoólicos Anônimos, Narcóticos Anônimos, Outros-Self-Published (1993)LufrejuAinda não há avaliações
- Trisk Termos e Definicoes PDFDocumento12 páginasTrisk Termos e Definicoes PDFLufrejuAinda não há avaliações
- Dutos Submarinos Projeto DetalhadoDocumento24 páginasDutos Submarinos Projeto DetalhadoLufreju100% (1)
- Apostila Iso 9001 2008 - ComentadaDocumento66 páginasApostila Iso 9001 2008 - ComentadaPriscila AlvesAinda não há avaliações
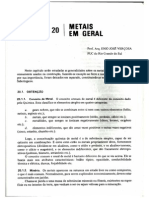
- Metais e Seus Derivados - BásicoDocumento57 páginasMetais e Seus Derivados - BásicoLufrejuAinda não há avaliações
- E Book Dicas de Negociacao PDFDocumento80 páginasE Book Dicas de Negociacao PDFWellingtonAinda não há avaliações
- O Que É Vida - Erwin SchrodingerDocumento0 páginaO Que É Vida - Erwin SchrodingerLufrejuAinda não há avaliações
- Ensino Religioso 6º Ano - Aula 01Documento1 páginaEnsino Religioso 6º Ano - Aula 01Marcos Silva100% (1)
- DSS - A Iluminação No Ambiente de TrabalhoDocumento1 páginaDSS - A Iluminação No Ambiente de TrabalhoJayme HabieAinda não há avaliações
- Barthes Retorica Da Imagem in O Obvio e o Obtuso LisbDocumento8 páginasBarthes Retorica Da Imagem in O Obvio e o Obtuso LisbAna FerreiraAinda não há avaliações
- Conversando Com As Almas Do Purgatório, Princesa Eugenia Von Der Leyen XDocumento226 páginasConversando Com As Almas Do Purgatório, Princesa Eugenia Von Der Leyen XJacqueline AgostinhoAinda não há avaliações
- Lista 04 - IC e Teste HipDocumento9 páginasLista 04 - IC e Teste HipAru ArthurAinda não há avaliações
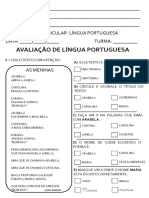
- Avaliacao de Lingua PortuguesaaDocumento2 páginasAvaliacao de Lingua PortuguesaaMonique Vieira Botelho MachadoAinda não há avaliações
- Josiel e Paulo Gestão de Pessoas Como Diferencial Competitivo Das Organizações Na Cidade de Paes Landim - PiDocumento20 páginasJosiel e Paulo Gestão de Pessoas Como Diferencial Competitivo Das Organizações Na Cidade de Paes Landim - Pijosiel rosendo de sousaAinda não há avaliações
- Avaliação. Diagnostica de CiênciasDocumento3 páginasAvaliação. Diagnostica de CiênciasleandroAinda não há avaliações
- ArquivoDocumento20 páginasArquivoAnonymous G63VAleq3Ainda não há avaliações
- Revestimento AnimalDocumento16 páginasRevestimento AnimalgoncalocordeiroAinda não há avaliações
- Conferencia Amo Minha Cidade - Porto SeguroDocumento5 páginasConferencia Amo Minha Cidade - Porto SeguroJonatas SoaresAinda não há avaliações
- Aula 4 - BNCC e Campos de Atuação PDFDocumento9 páginasAula 4 - BNCC e Campos de Atuação PDFAnna Clara Figueiredo LimaAinda não há avaliações
- O Evangelho de JoãoDocumento3 páginasO Evangelho de JoãoJoeser FreitasAinda não há avaliações
- Gestão de Indicadores Unidade 4Documento22 páginasGestão de Indicadores Unidade 4autorawarvincardAinda não há avaliações
- 24 - Controle de Revisão PDFDocumento7 páginas24 - Controle de Revisão PDFOsvaldo MendesAinda não há avaliações
- Apresentação de CompressoresDocumento28 páginasApresentação de CompressoresRyan TiagoAinda não há avaliações
- A Matemática Dos PanfletosDocumento5 páginasA Matemática Dos PanfletosLidiane CarvalhoAinda não há avaliações
- Folder Mulher PlenaDocumento6 páginasFolder Mulher PlenaWillianAinda não há avaliações
- Prova UFMG 2014Documento11 páginasProva UFMG 2014Bruno AlvesAinda não há avaliações
- Otesourodosclasssicos Dom Quixote Miguel CervantesDocumento21 páginasOtesourodosclasssicos Dom Quixote Miguel CervantesArianne BorgesAinda não há avaliações
- Embrapa 2012 Pagamento Servicos AmbientaisDocumento24 páginasEmbrapa 2012 Pagamento Servicos AmbientaisSebastian MayrAinda não há avaliações
- Catálogo Com Preço - Noites ColoridasDocumento30 páginasCatálogo Com Preço - Noites ColoridasjulianetramontiniAinda não há avaliações
- O Actor Moçambicano Denilson ManhiqueDocumento2 páginasO Actor Moçambicano Denilson ManhiqueArnaldino DionísioAinda não há avaliações
- Ofício de Nossa Senhora Das DoresDocumento4 páginasOfício de Nossa Senhora Das DoresMairon Miguel RodriguezAinda não há avaliações
- Monografia - Atividades TutoriaisDocumento69 páginasMonografia - Atividades TutoriaisTayane PortesAinda não há avaliações
- Interface Gráfica AmigávelDocumento71 páginasInterface Gráfica AmigávelTerencio BaiaoAinda não há avaliações