Você também pode gostar
- Catalogo de Pecas 636D - PT-BRDocumento166 páginasCatalogo de Pecas 636D - PT-BRWeverton Pereira55% (11)
- Esquema Electrico Volvo VMPDF - CompressDocumento19 páginasEsquema Electrico Volvo VMPDF - CompresssaimolAinda não há avaliações
- 3 Sensores Automotivos 1xDocumento25 páginas3 Sensores Automotivos 1xRick Ricardo100% (4)
- Adacoplam - CATÁLOGO ADACOPLAM COMPLETO2020-2021Documento99 páginasAdacoplam - CATÁLOGO ADACOPLAM COMPLETO2020-2021Alessandro100% (1)
- Atividade de Pesquisa - Acionamentos Elétricos Lucas Monteiro FonsecaDocumento5 páginasAtividade de Pesquisa - Acionamentos Elétricos Lucas Monteiro FonsecaLucas FonsecaAinda não há avaliações
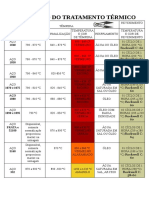
- Gabarito Cuteleiro TTDocumento4 páginasGabarito Cuteleiro TTleandroAinda não há avaliações
- Dicionario Naval de Termos TecnicosDocumento82 páginasDicionario Naval de Termos Tecnicosjvexoskeletal100% (1)
- VW Group Possiveis Security Access Code ValidosDocumento2 páginasVW Group Possiveis Security Access Code Validoswillian galdinoAinda não há avaliações
- Catalogo MANROD 2018-2019Documento68 páginasCatalogo MANROD 2018-2019Roberto RAinda não há avaliações
- Nissan 2.5 16v YD25DDTiDocumento5 páginasNissan 2.5 16v YD25DDTiDivaldo FelipeAinda não há avaliações
- Abnt NBR ISO 1176: Norma BrasileiraDocumento11 páginasAbnt NBR ISO 1176: Norma BrasileiranfstreyAinda não há avaliações
- Lançamentos Inc. 20-21 - OptimizeDocumento8 páginasLançamentos Inc. 20-21 - OptimizeFernando IncopartsAinda não há avaliações
- Catalogo PCP 6000 27 11 17Documento39 páginasCatalogo PCP 6000 27 11 17TratorTecMaq AlissonAinda não há avaliações
- Laudo TécnicoDocumento8 páginasLaudo TécnicoEmerson JuniorAinda não há avaliações
- Tabela Compressao de CilindroDocumento7 páginasTabela Compressao de CilindroAntonioAinda não há avaliações
- MMS1 - FL001Documento1 páginaMMS1 - FL001Carlos Eidi UyenoAinda não há avaliações
- WEG Quadros Eletricos Catalogo Portugues BRDocumento36 páginasWEG Quadros Eletricos Catalogo Portugues BRTorus EngenhariaAinda não há avaliações
- Manual de Serviços Módulo Iii Lavadoras de Roupas Top Load Eletromecânicas LTR10 - LTR12 - LTS12 - LS12Q Service ManualDocumento26 páginasManual de Serviços Módulo Iii Lavadoras de Roupas Top Load Eletromecânicas LTR10 - LTR12 - LTS12 - LS12Q Service ManualJoão Francisco Rivera FerrariAinda não há avaliações
- Memorial de Cálculo Fixação GuindautoDocumento13 páginasMemorial de Cálculo Fixação GuindautoGabriel DutraAinda não há avaliações
- Man - Manometros - Eletricos - BOOST UP TSI RV1Documento1 páginaMan - Manometros - Eletricos - BOOST UP TSI RV1edufpbhAinda não há avaliações
- Audi A3 Tfsi Loc ComponentesDocumento3 páginasAudi A3 Tfsi Loc ComponentesEderson AmaroAinda não há avaliações
- Códigos de Erro Loadall T3Documento15 páginasCódigos de Erro Loadall T3ScribdTranslationsAinda não há avaliações
- Formula 1Documento12 páginasFormula 1luis.andradeAinda não há avaliações
- Alternado GbuschDocumento21 páginasAlternado GbuschPedro MoraesAinda não há avaliações
- Stellantis - Trabalhe Conosco Job Convo 2Documento1 páginaStellantis - Trabalhe Conosco Job Convo 2Paulo Henrique BarbosaAinda não há avaliações
- Procedimento de Troca Da Correia Dos Elevadores!Documento14 páginasProcedimento de Troca Da Correia Dos Elevadores!Ivan CesarAinda não há avaliações
- MedidasDocumento40 páginasMedidasjuniorforteAinda não há avaliações
- Plataforma ElevatóriaDocumento5 páginasPlataforma Elevatóriadurit storeAinda não há avaliações
- Regolazione DebímetroDocumento3 páginasRegolazione DebímetrounoAinda não há avaliações
- Atego 2426 6x2 Plataforma B09916597Documento2 páginasAtego 2426 6x2 Plataforma B09916597Filip FaustAinda não há avaliações