Você também pode gostar
- Plotando Um Gráfico Para Ler Volume De Fluido Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Volume De Fluido Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De H2 Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De H2 Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Gaussímetro No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Gaussímetro No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Glp No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Glp No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Fluido No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Fluido No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De Glp Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De Glp Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Álcool No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Álcool No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Gaussímetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Gaussímetro Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De H2 No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De H2 No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Co2 No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Co2 No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De Co2 Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De Co2 Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De Co Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De Co Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Amperímetro No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Amperímetro No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Ozônio No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Ozônio No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Dinamômetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Dinamômetro Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Co No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Co No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Termômetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Termômetro Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Através Da Leitura De Fluxo De Ar Programado No ArduinoNo EverandPlotando Um Gráfico Através Da Leitura De Fluxo De Ar Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Higrômetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Higrômetro Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Decibelímetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Decibelímetro Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De Benzeno Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De Benzeno Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Fluxo De Ar No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Fluxo De Ar No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De Amônia Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De Amônia Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Célula De Carga Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Célula De Carga Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Uv Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Uv Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De Ozônio Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De Ozônio Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Amperímetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Amperímetro Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De Álcool Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De Álcool Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Amônia No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Amônia No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Ph No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Ph No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
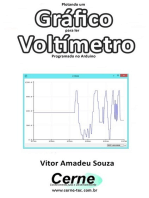
- Plotando Um Gráfico Para Ler Voltímetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Voltímetro Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Decibelímetro No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Decibelímetro No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Higrômetro No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Higrômetro No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Comunicação Com Memória Fram Programado No ArduinoNo EverandComunicação Com Memória Fram Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Voltímetro No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Voltímetro No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger Para Medição De Concentração De H2 Com ArduinoNo EverandDesenvolvendo Um Datalogger Para Medição De Concentração De H2 Com ArduinoAinda não há avaliações
- Obtendo A Leitura De Benzeno No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Benzeno No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Barômetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Barômetro Programado No ArduinoAinda não há avaliações
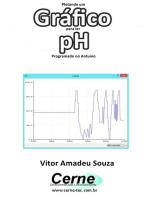
- Plotando Um Gráfico Para Ler Ph Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Ph Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Célula De Carga No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Célula De Carga No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Acelerômetro Com O Sensor Mx2125 Programado No ArduinoNo EverandAcelerômetro Com O Sensor Mx2125 Programado No ArduinoAinda não há avaliações
- Comunicação Udp/ip Em Vc# E Módulo Ethernet W5100 Programado Em Arduino Com PoeNo EverandComunicação Udp/ip Em Vc# E Módulo Ethernet W5100 Programado Em Arduino Com PoeAinda não há avaliações
- Obtendo A Leitura De Dinamômetro No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Dinamômetro No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Comunicação Udp/ip Com Vc# E Módulo Ethernet W5100 Programado Em ArduinoNo EverandComunicação Udp/ip Com Vc# E Módulo Ethernet W5100 Programado Em ArduinoAinda não há avaliações
- Comunicação Udp/ip Em Vb E Módulo Ethernet W5100 Programado Em Arduino Com PoeNo EverandComunicação Udp/ip Em Vb E Módulo Ethernet W5100 Programado Em Arduino Com PoeAinda não há avaliações
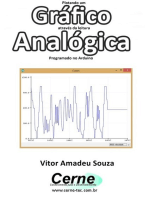
- Plotando Um Gráfico Através Da Leitura Analógica Programado No ArduinoNo EverandPlotando Um Gráfico Através Da Leitura Analógica Programado No ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger Para Medição De Concentração De Benzeno Com ArduinoNo EverandDesenvolvendo Um Datalogger Para Medição De Concentração De Benzeno Com ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger Para Medição De Concentração De Glp Com ArduinoNo EverandDesenvolvendo Um Datalogger Para Medição De Concentração De Glp Com ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger Para Medição De Concentração De Co Com ArduinoNo EverandDesenvolvendo Um Datalogger Para Medição De Concentração De Co Com ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger Para Medição De Concentração De Co2 Com ArduinoNo EverandDesenvolvendo Um Datalogger Para Medição De Concentração De Co2 Com ArduinoAinda não há avaliações
- Obtendo A Leitura De Barômetro No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Barômetro No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger Para Medição De Concentração De Amônia Com ArduinoNo EverandDesenvolvendo Um Datalogger Para Medição De Concentração De Amônia Com ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger Para Medir Volume De Fluido Com ArduinoNo EverandDesenvolvendo Um Datalogger Para Medir Volume De Fluido Com ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger Para Um Luxímetro Com ArduinoNo EverandDesenvolvendo Um Datalogger Para Um Luxímetro Com ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger Para Um Hidrômetro Com ArduinoNo EverandDesenvolvendo Um Datalogger Para Um Hidrômetro Com ArduinoAinda não há avaliações
- Eletrônica: UnidadeDocumento117 páginasEletrônica: UnidadeBelo trader100% (1)
- Manual LabINO PDFDocumento38 páginasManual LabINO PDFFabiano BertucheAinda não há avaliações
- Nokia 1661 UG PT-BRDocumento16 páginasNokia 1661 UG PT-BRmvcafeAinda não há avaliações
- Esquema Eletrico VT-140Documento7 páginasEsquema Eletrico VT-140Natan mathiolaAinda não há avaliações
- Curso Instrumentista MontadorDocumento39 páginasCurso Instrumentista MontadorCosta 2.0Ainda não há avaliações
- Nmap 6 Network Exploration (001-200)Documento200 páginasNmap 6 Network Exploration (001-200)Jurdmar Dos Santos JurdmarAinda não há avaliações
- Portifolio UnoparDocumento24 páginasPortifolio UnoparHenrique BorgesAinda não há avaliações
- O Que Diz o Inquérito Da PF Sobre A Invasão Hacker Ao TSEDocumento1 páginaO Que Diz o Inquérito Da PF Sobre A Invasão Hacker Ao TSEJenifer OliveiraAinda não há avaliações
- Manual Drive-Tech EASYDocumento20 páginasManual Drive-Tech EASYdrbeto182Ainda não há avaliações
- Capítulo 1-O Projeto Elétrico - Conceitos Preliminares PDFDocumento11 páginasCapítulo 1-O Projeto Elétrico - Conceitos Preliminares PDFTiago Da Silva SantanaAinda não há avaliações
- Procedimento para Configuração de Radios Minilink-TN R3 v.1Documento34 páginasProcedimento para Configuração de Radios Minilink-TN R3 v.1morestes2011100% (5)
- Prop Access 16Documento7 páginasProp Access 16Ramón MartinezAinda não há avaliações
- Informática para Concursos Mais de 550 Questões Comentadas by Marcelo Andrade, ConcursoDocumento278 páginasInformática para Concursos Mais de 550 Questões Comentadas by Marcelo Andrade, ConcursoRafael De Padua OliveiraAinda não há avaliações
- 2.1 - Manual CCM-03Documento74 páginas2.1 - Manual CCM-03Patrick DiasAinda não há avaliações
- Internet, Seus Principais Serviços e FerramentasDocumento53 páginasInternet, Seus Principais Serviços e FerramentasAmade Baptista Maiquita100% (2)
- A3 - Packet Tracer - Ambientes Computacionais e ConectividadeDocumento2 páginasA3 - Packet Tracer - Ambientes Computacionais e ConectividadematheusperfectworldAinda não há avaliações
- Manual de Instalação CSI 100 125KTL GI E 01.2020Documento36 páginasManual de Instalação CSI 100 125KTL GI E 01.2020Peterson dSMAinda não há avaliações
- Impactos Da Virtualização Na Segurança InformaçãoDocumento67 páginasImpactos Da Virtualização Na Segurança InformaçãoJosan Neves de CastroAinda não há avaliações
- Ebook-ProfibusPA - Guia R PidoDocumento41 páginasEbook-ProfibusPA - Guia R PidoLuzenilton Jr.Ainda não há avaliações
- Manual Desenvolvedor GertecDocumento37 páginasManual Desenvolvedor GertecWilliam LepletierAinda não há avaliações
- Manual PosonicDocumento64 páginasManual PosonicRicardoMarquesAinda não há avaliações
- Curso Manutenção Computadores Conceitos FundamentaisDocumento4 páginasCurso Manutenção Computadores Conceitos FundamentaisOliver MouraAinda não há avaliações
- Desenvolvimento Tecnológico e Científico e A Sustentabilidade Da Vida Na TerraDocumento65 páginasDesenvolvimento Tecnológico e Científico e A Sustentabilidade Da Vida Na TerraAlector de PinaAinda não há avaliações
- AT de TIC Da 8a Classe III TrimestreDocumento2 páginasAT de TIC Da 8a Classe III TrimestreJoaquim SergioAinda não há avaliações
- Avaliação Interdisciplinar 4ºDocumento14 páginasAvaliação Interdisciplinar 4ºGustavo BanAinda não há avaliações
- Manual Do Usuario ExpressoMG Drive-V2Documento54 páginasManual Do Usuario ExpressoMG Drive-V2Renan NevesAinda não há avaliações
- Introdução à Rede de ComputadoresDocumento4 páginasIntrodução à Rede de ComputadoresmanzambiAinda não há avaliações
- 622-Texto Del Artículo-3620-2-10-20200102Documento21 páginas622-Texto Del Artículo-3620-2-10-20200102Rodrigo Medeiros LehnemannAinda não há avaliações
- (20230300-PT) Exame Informática 333 PDFDocumento86 páginas(20230300-PT) Exame Informática 333 PDFluisbbarrosAinda não há avaliações
- 10.4.4 Lab - Build A Switch and Router Network - ILMDocumento14 páginas10.4.4 Lab - Build A Switch and Router Network - ILMSenai928 PompeiaAinda não há avaliações
- Redes - Introducao SDHDocumento5 páginasRedes - Introducao SDHRenan Silva SantosAinda não há avaliações
- DCN para Engenharia de ComputaçãoDocumento6 páginasDCN para Engenharia de ComputaçãoEduardo Filgueiras DamascenoAinda não há avaliações