Escolar Documentos
Profissional Documentos
Cultura Documentos
Motor Es
Enviado por
LetíciaDireitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Motor Es
Enviado por
LetíciaDireitos autorais:
Formatos disponíveis
Eletrotcnica Motores Eltricos
Motores Eltricos
Um motor eltrico uma mquina capaz de transformar energia eltrica em energia mecnica, utilizando normalmente o princpio da reao entre dois campos magnticos. Os motores por suas caractersticas de construo e funcionais, podem ser classificados genericamente como: (a) de corrente contnua, (b) de induo ou assncronos e (c) sncronos. Este texto apresentar em detalhes apenas os motores de induo trifsicos e monofsicos. Do motor sncrono ser dada apenas uma descrio, sendo q os motores de corrente contnua no sero ue abordados.
1 Motores de Induo Trifsicos (MIT)
Um motor de induo composto basicamente de duas partes: um Estator e um Rotor. O estator constitui a parte esttica de um motor e o rotor sua parte mvel. O estator composto de chapas finas de ao magntico tratadas termicamente para reduzir ao mnimo as perdas por correntes parasitas e histerese. Estas chapas tm o formato de um anel com ranhuras internas (vista frontal) de tal maneira que possam ser alojados enrolamentos que devero criar um campo magntico no estator. O rotor, composto de chapas finas de ao magntico tratadas termicamente como o estator, tem tambm o formato de um anel (vista frontal), com os enrolamentos alojados longitudinalmente. O motor de induo o motor de construo mais simples. Estator e rotor so montados solidrios, com um eixo comum aos anis que os compem. A aplicao de uma tenso nos enrolamentos do estator ir fazer com que aparea uma tenso nos enrolamentos do rotor. Assim o estator pode ser considerado como o primrio de um transformador e o rotor como seu secundrio. O espao entre o estator e o rotor denominado entreferro. A figura 1 apresenta esquematicamente um MIT.
Figura 1 Mquina de induo Conforme se pode observar na figura 1b, no estator de uma MIT os enrolamentos, ou bobinas, so em nmero de trs. Estas bobinas, alojadas nas ranhuras do estator, podem ser ligadas em estrela ou tringulo.
1/23
Eletrotcnica Motores Eltricos
No rotor os enrolamentos, enrolados longitudinalmente a seu eixo, podem ser realizados de duas maneiras, o que d origem a dois tipos de rotor: Rotor Gaiola de Esquilo: tipo mais comum, tem no rotor os condutores da bobinas curtocircuitados em cada terminal por anis terminais contnuos (figura 2.a). Rotor Bobinado: neste tipo de rotor, condutores de cobre que formam uma bobina so colocados em diversas ranhuras (usualmente isolados do ncleo) e podem, no caso de existirem trs bobinas, ser ligados em estrela ou tringulo. Neste caso, cada terminal do enrolamento trifsico ligado a anis coletores que so isolados do eixo do rotor. Usualmente um resistor trifsico equilibrado varivel ligado aos anis coletores atravs de escovas a fim de variar a corrente na partida. (figura 2.b).
Anis de Curto-Circuito Enrolamentos Terminais dos enrolamentos Escovas
Barras
Anis Coletores (deslizantes)
(a)
(b)
Figura 2 Rotor gaiola de esquilo e bobinado Algumas vezes a mquina tipo gaiola chamada de mquina sem escovas e a mquina com rotor bobinado chamada de mquina de anis. 1.1 Campo Magntico Girante Um campo magntico girante est na base do princpio de funcionamento da mquina de induo. Este campo produzido da seguinte maneira: coloca-se nas ranhuras do estator um conjunto de trs bobinas independentes, defasadas de 120 no espao, e faz-se circular por estas bobinas correntes trifsicas defasadas de 120 no tempo. Estas correntes trifsicas, aplicadas s bobinas do estator podem ser representadas por: i a (t ) = I . sen( t ) A ib ( t ) = I . sen( t 120 ) A i c ( t ) = I . sen( t + 120 ) A Toda bobina quando percorrida por uma corrente produz um campo magntico cuja fmm dada por ( t ) = N .i ( t ) . A fmm produzida pelas correntes trifsicas dada ento por: a ( t ) = N . I . sen( t ) A b ( t ) = N . I . sen( t 120 ) A c ( t ) = N .I . sen( t + 120 ) A Se as trs bobinas estiverem orientadas segundo um eixo comum a fora resultante ser nula ( a ( t ) + b ( t ) + c (t ) = 0 ). Como as trs bobinas esto defasadas no espao de 120, adotando-se a bobina percorrida por i a (t ) (aa) na referncia tem-se:
2/23
Eletrotcnica Motores Eltricos
( t ) = a . cos( 0 ) + b . cos(120) + c . cos( 240 ) ( t ) = N .I .[sen( t ). cos(0 ) + sen( t 120). cos(120) + sen( t + 120). cos( 240 )] Aps o desenvolvimento trigonomtrico tem-se:
( t ) = 1,5. N .I . sen( t )
Ou seja, a fmm total produzir um campo magntico girante com velocidade e intensidade constantes, com a velocidade dependendo das correntes aplicadas s bobinas. As figuras 3.a e 3.b apresentam as correntes trifsicas que circulam pelas bobinas, em suas representaes fasorial e no domnio do tempo. A figura 3.c apresenta esquematicamente a ligao do conjunto de trs bobinas aa, bb e cc (ponto 4 da figura 3.b: corrente nas bobinas bb e cc positiva corrente saindo do papel - e a corrente na bobina aa negativa entrando no papel) por onde circulam as correntes trifsicas. Nas figuras 3.d, 3.e e 3.f pode-se observar a fora resultante (t ) para as situaes 1, 2 e 3 da figura 3.b. A regra da mo direita indica ento o sentido das foras magnticas provocadas por cada corrente trifsica e consequentemente do fluxo. A soma fasorial destas foras apresenta a fora (t ) responsvel pelo campo girante.
-b
-a
-c (a) (b) (c)
(d)
(e)
(f)
Figura 3 Campo Girantes em Mquinas de Induo Logo, o fato de aplicar trs correntes trifsicas (cf. figura 3.b) s bobinas do estator, resulta num campo magntico girante constante, cujo deslocamento no espao corresponde exatamente aos deslocamentos tempo-fsico da freqncia da fonte. Esquematicamente se pode representar esse fato utilizando a figura 3. Assim, enquanto na figura 3.b a corrente foi da posio 1 a 3 (t=120), nas figuras 3.d, 3.e e 3f se pode ver um deslocamento do campo resultante de 120.
3/23
Eletrotcnica Motores Eltricos
Caractersticas ligadas ao nmero de bobinas colocadas nas ranhuras do estator determinam o nmero de plos que a m quina ir possuir (conforme pode ser observado na figura 3, com trs conjuntos de bobinas tem-se a formao de dois plos na mquina) e este nmero de plos ir determinar a velocidade do campo girante. As razes que fazem com que as ranhuras e o nmero de plos se relacionem com a velocidade do campo no sero apresentadas em detalhes neste texto. Na figura 4, para ilustrar o conceito de plos, apresenta-se esquematicamente duas mquinas de induo, a da esquerda de dois plos e a da direita de 4 plos.
N
Figura 4 Campos Girantes (2 e 4 plos) A velocidade de rotao do campo girante criado pela fora (t ) denominada Velocidade Sncrona ( n S ) sendo dada por: nS = 120. f onde: p
n s : rotao sncrona em rpm
f: freqncia da rede em hertz p: nmero de plos
1.2 Princpio de Funcionamento do Motor de Induo O dispositivo apresentado na figura 4 ser utilizado para demonstrar o princpio de funcionamento de um motor de induo. Este dispositivo consiste de um im suspenso por um fio. Sob o im um disco de cobre ou alumnio est apoiado sob um mancal que est por sua vez apoiado em uma placa de ferro. Neste dispositivo o campo do im permanente completa-se atravs do conjunto disco-placa de ferro.
Figura 5 - Princpio de Funcionamento do Motor de Induo
4/23
Eletrotcnica Motores Eltricos
A medida que o im girar o disco ir acompanh-lo. Este fato se deve s correntes parasitas (cf. figura 5.b) que aparecero no disco devido a seu movimento relativo e relao ao campo m magntico. A Lei de Lenz1 explica o sentido contrrio da tenso induzida (e conseqentes correntes parasitas) que ir produzir o campo que tender a se opor a fora, ou seja, ao movimento que produziu a tenso induzida. Estas correntes parasitas tendero a criar sob o polo N do im um polo S no disco e sob o polo S do im um polo N no disco. Enquanto durar o movimento, que produz as correntes parasitas, estes plos sero criados no disco. O disco desta maneira ir girar no mesmo sentido do im pela atrao existente entre estes pares de plos que tendero a alinhar-se. Um fato extremamente importante que o disco ir girar a uma velocidade menor que a do im, pois caso contrrio no existiria movimento relativo entre o im e o disco e como conseqncia no existiriam as correntes parasitas nem os plos, nem o movimento do disco e nem o torque. Desta forma, o disco deve escorregar em velocidade para que se produza torque. A diferena de velocidade que existe entre a velocidade sncrona do campo magntico girante e a velocidade um pouco menor na qual gira o disco chamada de escorregamento (s), e normalmente expressa em porcentagem.
s =
n - nr velocidade de escorregam ento = s velocidade sncrona ns
n s : velocidade sncrona do campo girante (rpm) n r : velocidade do rotor (rpm) Exemplo 1: Um motor de induo trifsico tem no estator 3 ranhuras por plo e por fase. Sendo 60 Hz a freqncia da rede, pede-se: a) o nmero de plos produzidos e o nmero total de ranhuras do estator. b) a velocidade do campo magntico girante. c) a velocidade do rotor para um escorregamento de 3 %. Soluo: a) p = 2 x n de ranhuras por polo = 6 plos Total de ranhuras = (3 ranhuras por polo e por fase) x (6 plos) x (3 fases) = 54 ranhuras b) n S = 120 f 120.60 = = 1200 rpm p 6
c) n r = n S .(1 s ) = 1200.(1 0,03) = 1164 rpm 1.3 Corrente Solicitada pelo Motor A potncia mecnica no eixo de um motor expressa em HP ou CV. A potncia eltrica de entrada, maior que a potncia mecnica, igual a potncia do motor dividida pelo rendimento (em torno de 80% para a maioria dos motores). A corrente nominal do motor, em amperes, pode ser obtida ento da seguinte expresso:
Em todos os casos de induo eletromagntica, uma fem induzida far com que a corrente circule em um circuito fechado, num sentido tal que seu efeito magntico se oponha variao que a produziu:
e= N d dt
5/23
Eletrotcnica Motores Eltricos
I = onde: V: tenso entre fases;
HP x 746 CV x 736 ou I = K x V x FP x K x V x FP x : rendimento K: constante igual a 3 para motor trifsico.
FP : fator de potncia;
Exemplo 2: Determine a corrente nominal para um motor de 15 HP, trifsico, 220 V entre fases, fator de potncia 0,9 indutivo e rendimento de 82 %.
I =
15 x 746 3 x 220 x 0,9 x 0,82
= 39,79 A
1.4 Fora Eletromotriz Induzida e Torque no Motor de Induo Seja um motor de induo comercial tipo gaiola de esquilo com o rotor composto de condutores de cobre embutidos num ncleo de ferro laminado. A figura 6.a mostra trs destes condutores do rotor (A, B e C) e sua relao com um campo magntico multipolar produzido por um enrolamento trifsico.
(a)
(b)
Figura 6 (a) FEM induzidas produzidas nos condutores do rotor; (b) Relao entre o campo e as FEM do rotor Imaginemos que o rotor est parado (num bloqueio) e que devido ao campo girante se tem um fluxo magntico girando velocidade sncrona no sentido horrio em relao ao condutor A do rotor, situado diretamente sob um plo N, o mesmo acontecendo para C em relao a um plo S (observar o campo criado entre os plos N e S conforme figura 4). Como o rotor est parado, o movimento relativo dos condutores em relao ao campo para a esquerda. A determinao do sentido da fora eletromotriz induzida pode ser feita atravs da regra de Fleming da mo direita com o polegar indicando o movimento, o indicador o campo e o dedo mdio a fem. A corrente associada s foras, para o condutor A uma corrente saindo do papel e para o condutor C uma corrente entrando. Consequentemente nestes pontos aparecero fluxos magnticos, no sentido anti-horrio para o condutor A e horrio para o condutor C Pelas interaes entre os campos produzidos pelas correntes induzidas e os campos multipolares do estator, tem-se repulso esquerda e atrao direita dos condutores A e C (cf. figura 7), ou seja, um movimento no mesmo sentido do campo magntico. O condutor B, no instante mostrado, como est numa regio interpolar no sede de fem induzida.
6/23
Eletrotcnica Motores Eltricos
A Movimento Relativo I Induzida A Repulso Atrao
X
C Atrao
Repulso Campo (a)
(b)
Figura 7 (a) correntes induzidas (b) interao entre campos Em repouso, a freqncia da fem induzida no rotor igual freqncia do campo magntico girante. Por outro lado, se o rotor fosse capaz de girar mesma velocidade do campo magntico girante, no haveria tenso induzida (isto corresponde ao condutor A ficar sob o plo norte e permanecer sob este plo). Logo a freqncia das tenses induzidas no rotor varia inversamente com a velocidade do rotor, desde um mximo (freqncia da linha) com o rotor em repouso, at a freqncia nula na velocidade sncrona. Assim, a freqncia da tenso (ou corrente) induzida no rotor dada por:
fr = s. f
onde: f: freqncia da tenso aplicada ao estator (freqncia da linha).
Desta maneira, o motor de induo de rotor bobinado pode ser usado como dispositivo de converso de freqncia quando seu rotor acionado a uma dada velocidade (potncia mecnica fornecida ao seu eixo) e se retira a fem atravs dos anis coletores. Neste caso tem-se um gerador de induo. Os condutores do rotor do motor de induo tm uma resistncia Rr e uma reatncia Xr que depende da freqncia do rotor (a indutncia das barras (Lr) fixa). usual determinar-se a reatncia do rotor, atravs do ensaio a rotor bloqueado, para ento se utilizar este valor como um padro de referncia. Uma vez que a freqncia do rotor aumenta com o escorregamento ( f r = s. f ) e a reatncia varia com a freqncia ( X r = 2. . f . Lr ), a reatncia do rotor dada por: X r = s. X rb , onde: s = escorregamento (em decimais); X rb = reatncia a rotor bloqueado. Do mesmo modo, a tenso induzida no rotor (Er) funo do fluxo e consequentemente da freqncia, sendo dada por: Er = s.Erb , onde: Erb = tenso induzida a rotor bloqueado
Assim, a tenso induzida no rotor, a reatncia e sua freqncia variam todas em funo do escorregamento desde um mximo (s = 1) para rotor bloqueado, at zero se a velocidade do rotor for igual velocidade sncrona. (s = 0). Exemplo 3: Um MIT de 4 plos opera a 60 Hz Se o escorregamento vale 5% a plena carga, calcule a freqncia da tenso induzida no rotor: a) no instante da partida, b) a plena carga. a) s =
ns - n r = 1 pois n r = 0 , logo f r = s. f = 60 Hz ns
b) a plena carga s = 0,05 logo f r = s. f = 0,05.60 = 3 Hz
7/23
Eletrotcnica Motores Eltricos
1.5 Circuito Equivalente para o Motor de Induo Conforme visto anteriormente, o motor de induo pode ser analisado como um transformador contendo um entreferro e tendo uma resistncia varivel no secundrio. Assim, o primrio do transformador corresponde ao estator do motor de induo, enquanto que o secundrio corresponde ao rotor. A figura 12 mostra o circuito equivalente, em termos monofsicos, onde: R1: resistncia por fase efetiva do estator X1: reatncia de disperso por fase do estator R2: resistncia por fase efetiva do rotor X2: reatncia de disperso por fase do rotor V1: tenso de fase aplicada no motor E1: fcem gerada pelo fluxo de entreferro resultante I1: corrente no estator E2: tenso induzida no rotor I2: corrente no rotor R2/s: representa o efeito combinado de carga no eixo e resistncia do rotor
R1 X1 X2
& V1
I&1
& E1
& E2
I&2
R2 s
Figura 12: Circuito equivalente por fase do MIT Para desenvolver melhor este circuito, conveniente expressar as quantidades do rotor referidas ao estator. Para este propsito, deve-se conhecer a razo de transformao, como num transformador. Esta razo de tenso num motor de induo, que ser denominada a, deve incluir os efeitos das distribuies dos enrolamentos do estator e rotor. Assim: R2 = a2 R2 X2 = a2 X2 onde R2 : resistncia por fase do rotor referida ao estator X2 : reatncia de disperso por fase do rotor referida ao estator
Xm: reatncia que considera a magnetizao do ncleo Rm: resistncia que considera a perda no ncleo Im: corrente devido magnetizao e perdas do ncleo
Considerando as similaridades entre um motor de induo e um transformador, pode-se referir as quantidades do rotor para o estator, obtendo-se o circuito equivalente por fase mostrado na figura13.a.
8/23
Eletrotcnica Motores Eltricos
R1
& I1
X1
& Ie
X 2'
&' I2
& V1
& Im
Xm
Rm
& Ic
' R2 s
(a)
R1
& I1
X1
& Ie
' X2
' R2
&' I2
& V1
& Im
Xm
Rm
& Ic
R2' (1 s) s
(b)
Figura 13 Circuito equivalente modificado O valor de R2 /s pode ser separado em duas parcelas, ou seja:
' R2 R' ' = R2 + 2 (1 s ) . s s
' O valor de R2 representa a resistncia por fase do rotor parado referida ao estator e ' R2 (1 s ) s a resistncia dinmica por fase que depende da velocidade do rotor, valor correspondente carga no motor. Este desmembramento mostrado na figura 13.b.
A maior utilidade do circuito equivalente para um MIT sua aplicao no clculo do desempenho da mquina. Todos os clculos so feitos em termos monofsicos, admitindo-se uma operao balanceada da mquina. A figura 14 mostra a distribuio de potncias e as vrias perdas por fase da mquina, sendo que:
Pi : potncia de entrada Pe : potncia devido a perda no estator (enrolamento mais ncleo) Pee : potncia devido a perda no cobre da bobina do estator Pne : potncia devido a perda do ncleo, onde a maior parte est no estator.
Pg : potncia que atravessa o entreferro
Pr : potncia perdida no rotor (condutores)
Pd : potncia eletromagntica desenvolvida Pmec : potncia correspondente a perda rotacional (mecnica) Po : potncia de sada no eixo
9/23
Eletrotcnica Motores Eltricos
Pi = V1. I 1. cos 1
' Pg = Pi Pe = I 22.
' R2 s
Pd = Pg Pr = (1 s ) Pg
Po = Pd Pmec
Pe = Pee + Pne Pe = I12 .R1 + I c2 .Rm
' ' Pr = I 22 .R2
Pmec
Figura 14: Distribuio de potncia num motor de induo O Rendimento de um Motor definido como sendo a razo entre a potncia de sada no eixo e a potncia de entrada, ou seja: = P0 / Pi. Exemplo 4: O rotor de um motor de induo trifsico 60 Hz, 4 plos consome 120 kW a 3 Hz. Determine: a-) a velocidade do rotor b-) as perdas no cobre do rotor Soluo: a-) como foram dadas as freqncias tem-se:
f r = s f ou seja, 3 = s . 60 , logo s = 0,05
ns =
120 f 120 . 60 = = 1800 rpm p 4
n r = ( 1 - s ) ns = (1 0,05). 1800 =1710 rpm b-) a potncia que atravessa o entreferro dada por Pg = Pi - Pe. Como as perdas no estator no foram dadas sero desprezadas. Tem-se ento:
' R2 e como a potncia devido as perdas no cobre do rotor s ' ' dada por Pr = I 22 R2 tem-se: Pr = s.Pg = 0,05.120 = 6 kW ' Pg = Pi = 120 kW, mas Pg = I 22 .
Exemplo 5: O motor similar ao do problema anterior (60 Hz, 4 plos, sendo 120 W a potncia que atravessa o entreferro Pr = 6 KW , com fr=3Hz) tem uma perda no cobre do estator de 3 kW, uma perda mecnica de 2 kW e uma perda no ncleo do estator de 1,7 kW. Calcule a potncia de sada no eixo do rotor e o rendimento. Soluo: Tem-se que: Pg = 120 kW e Pr = 6 kW
As outras potncias dadas so: Pee = 3 kW Pmec = 2 kW e Pne = 1,7 kW
10/23
Eletrotcnica Motores Eltricos
A potncia de sada dada por: P0 = Pd - Pmec = Pg - Pr - Pmec = 120 - 6 - 2 = 112 kW Para o clculo do rendimento temos: Potncia de entrada: Pi = Pg + Pe = 120 + 3 + 1,7 = 124,7 kW
112 P0 = = 0,897 ou 89,7 % 124,7 P i
Exemplo 6: Os parmetros por fase do circuito equivalente visto na figura abaixo, para um motor de ' induo de 400 V (linha), 60 Hz, trifsico, ligao estrela, 4 plos, so: R1 = 0,2 , R2 ' = 0,1 , X 1 = 0,5 , X 2 = 0,2 e Xm = 20 . Se as perdas totais mecnicas, a 1755 rpm so 800 W, calcule para esta rotao: a) corrente de entrada b) potncia total de entrada c) potncia total de sada O circuito equivalente dado por: 0,2 j0,5 j0,2 0,1 d) torque de sada e) rendimento
& I1
400 V 3
&' I2
& Im
j20
0 ,1 (1 s ) s
a-) Inicialmente deve-se calcular a impedncia equivalente. Para isto deve-se calcular o valor do escorregamento para 1755 rpm:
s =
ns - n r 1800 - 1755 = = 0,025 ns 1800
120 . f 120 . 60 = = 1800 rpm p 4
ns =
Logo R2 (1-s) / s = 3,9 e a impedncia equivalente fica: Ze = 0,2 + j 0,5 +
Z e = 4,22 20 o
j 20 ( 4 + j 0,2 ) = 0,2 + j 0,5 + 3,77 + j 0,944 4 + j 20 + j 0,2
Para o clculo da corrente tem-se: & & & 400 0 = 2310 V e ento: I 1 = V1 = 54,7 20 A V1 = Ze 3
11/23
Eletrotcnica Motores Eltricos
b-) Como a potncia total de entrada trs vezes a potncia monofsica temos:
Pi3 = 3 ( V1 I1 cos ) = 3 . 231 . 54,7 . cos 200 = 35,6 kW
c-) Para a potncia total de sada tem-se: Po = Pd - Pmec Pd = ( 1 s ) Pg A potncia total que atravessa o entreferro Pg para o circuito equivalente, como Rm nula pode ser calcula por:
Pg = Pi 3 3.Pe = Pi 3 3. Pee = 35,6 3.0,2.54,7 2 = 33,80 kW
Logo Pd = ( 1 s ) Pg = 0,975 . 33,80 = 32,96 kW Finalmente, Po = 32,96 0,80 = 32,16 kW d-) Clculo do torque de sada (T): P = T .
T = Po o
1755 = 183 rad/s 60 32160 = 175,74 N.m 183
o = 2
T =
e-) Clculo do rendimento:
Po 32,16 = = 0,90 ou 90 % Pi 35,6
1.6 Torque no Motor de Induo O Torque Desenvolvido (T) em cada um dos condutores individuais do rotor (ex.: condutor A da figura 6) na situao de motor parado pode ser expresso por: T = K t . .I r . cos r Kt : onde: constante de torque para o nmero de plos, enrolamento, unidades empregadas, etc. fluxo produzido por cada plo unitrio do campo magntico girante que concatena o condutor do rotor.
I r . cos r : componente da corrente do rotor em fase com
Os valores apresentados abaixo so utilizados na determinao da equao para o Torque na Partida (Tp) do motor de induo.
Rr : resistncia efetiva do motor (para a posio bloqueada) de todos os condutores do rotor combinados.
X rb : reatncia a rotor bloqueado de todos os condutores do rotor combinados.
R & Z rb : impedncia para o rotor bloqueado, dada por Z rb = Rr + X rb , com cos r = r . Z rb
I rb : corrente no rotor bloqueado, dada por I rb =
E rb
2 Rr2 + X rb
12/23
Eletrotcnica Motores Eltricos
Substituindo-se todos os valores na equao de torque desenvolvido, na situao de rotor bloqueado, tem-se o Torque de Partida:
Tp = K t . . Erb R +X
2 r 2 rb
Rr R +X
2 r 2 rb
Tp =
Kt . .E rb. Rr 2 2 Rr + X rb
Como o fluxo proporcional tenso de alimentao E f e como Erb (por ao de transformador) proporcional a E f , a equao acima pode ser simplificada para:
Tp = K 0 .E 2 . R r f
2 Rr2 + X rb
T p = K .E 2 f
Como a resistncia efetiva do rotor e a reatncia a rotor bloqueado so constantes para uma dada tenso aplicada, a uma freqncia constante, pode-se observar que o torque na partida diretamente proporcional ao quadrado da tenso aplicada ao enrolamento do estator. Para calcular o Torque Mximo desenvolvido em um motor de induo deve-se primeiramente calcular a corrente do rotor. Para qualquer escorregamento dado, tem-se que a corrente do rotor dada por:
Ir = s. Erb Rr2 + ( s. X rb ) 2
K t . .s .Erb .Rr . 2 2 Rr + ( s. X rb )
, e como cos r =
Rr Rr2 + ( s. X rb ) 2
, tem-se que o torque para qualquer
escorregamento dado por:
T=
Como Erb diretamente proporcional ao fluxo, tem-se: T =
Kt . 2 .s. Rr . Rr2 + ( s. X rb ) 2
Para se obter o Torque Mximo, deve-se diferenciar a expresso anterior em relao a resistncia do rotor e igualar este valor a zero. Desta maneira obtm-se Rr = sT max . X rb . Como resultado, tem-se para o torque mximo: Tmax
K .E f . = 2.( sT max . X rb ) 2
Exemplo 7: Um motor de induo de rotor de gaiola de 8 plos, 60 Hz carregado ao ponto onde ocorre o seu torque mximo. A resistncia do rotor, por fase de 0,3 e o motor desacelera por ter atingido o torque mximo a 650 rpm. Calcule: a. O escorregamento correspondente ao torque mximo b. A reatncia a rotor bloqueado c. A freqncia do rotor correspondente ao ponto do torque mximo Soluo: a-)
ns = 120 f 120 . 60 = = 900 rpm P 8
s Tmax =
ns - n r 900 - 650 = = 0,278 ns 900
13/23
Eletrotcnica Motores Eltricos
b-)
X rb =
Rr sT max
0,3 = 1,08 0,278
c-)
f r = sT max . f = 0,278.60 = 16,7 Hz
1.7 Caractersticas Operacionais de um Motor de Induo Estando o motor desligado, ao aplicar-se a ele sua tenso nominal ele desenvolver seu torque de partida de tal modo que sua velocidade comea a crescer. Com o motor em movimento, o escorregamento diminui pois o rotor est aumentando sua velocidade e o torque aumenta at a condio de torque mximo. Desta maneira a velocidade do motor ir aumentar ainda mais, reduzindo o escorregamento e simultaneamente o torque desenvolvido pelo motor. A velocidade do motor continuar a aumentar at um valor de escorregamento onde o torque desenvolvido torna-se igual ao torque aplicado. Neste ponto de equilbrio o motor continuar a girar na velocidade estabelecida at que o torque aplicado aumente ou diminua. A figura 8 mostra a relao entre os valores dos torques de partida, mximo e de plena carga desenvolvidos pelo motor em funo da sua velocidade e escorregamento. A figura mostra tambm a corrente no rotor do instante da partida (ponto a) at as condies de funcionamento em regime permanente, limitadas pelas posies a plena carga e a vazio (pontos c e d).
Figura 8 Torque desenvolvido e corrente no rotor 1.8 Partida do Motor de Induo Embora haja algumas excees, de uma maneira geral, um motor de induo requer aproximadamente seis vezes a sua corrente nominal para partida a tenso nominal. Na maioria das utilizaes, residenciais ou industriais, pequenos motores de induo do tipo gaiola, de baixa potncia, podem partir com ligao direta rede, sem que se verifiquem quedas na tenso de suprimento e sem que se verifique no motor um grande aumento do perodo de acelerao, desde o repouso, at sua velocidade nominal. Pelos elevados valores das correntes de partida as concessionrias de energia responsveis pelo fornecimento de energia residencial e comercial estabelecem limites de potncia para a partida a plena carga de grandes motores. Deve-se portanto utilizar sistemas de partida visando a diminuio da corrente de partida. No meio industrial, a adoo de um sistema de partida eficiente envolve
14/23
Eletrotcnica Motores Eltricos
consideraes quanto capacidade da instalao, requisitos da carga a ser considerada, alm da capacidade do sistema gerador. As prximas sees apresentam os principais mtodos de partida utilizados com MITs.
15/23
Eletrotcnica Motores Eltricos
1.8.1 Partida Estrela-Tringulo Em termos de simplicidade e custo, esta a maneira mais conhecida de partida de um motor de induo. Para que se possa aplicar este mtodo necessrio que o motor permita o acesso a seus terminais das bobinas do estator, de tal forma que seja possvel efetuar-se a conexo estrela durante a partida, e delta na operao. Quando ligadas em estrela, a tenso imposta cada bobina de El 3 , ou seja, 57,7 % da tenso da linha. Assim, por meio de chaves como mostra a figura 10, possvel fazer partir um motor de induo em estrela, com pouco mais da metade da tenso nominal aplicada cada bobina e posteriormente funcionar em delta com toda a tenso de linha. A corrente de linha para a partida fica reduzida a 1/3 da corrente nominal. O chaveamento da posio estrela para a posio delta deve ser feito to rapidamente quanto possvel para eliminar grandes correntes transitrias devidas a perda momentnea de potncia.
Figura 10 Chave para partida estrela-tringulo 1.8.2 Partida de Motor de Induo de Rotor Bobinado O torque de partida do motor de induo de rotor bobinado pode ser ajustado por meio de resistncias externas associadas ao circuito do rotor, ou seja atravs da conexo de resistores variveis em srie com cada bobina do rotor. Limitando-se a corrente no circuito do rotor, com torque adequado no instante da partida, a corrente de linha no estator consideravelmente reduzida. A figura 11 mostra um esquema de tal motor, sem os anis coletores e com os detalhes do sistema de controle composto de resistncias. Na posio desligado, mesmo com o motor energizado, o rotor no gira devido ao circuito do rotor estar aberto. O motor arranca ao primeiro contato da chave com a posio de mxima resistncia. O motor ir acelerar na medida em que a manopla move-se no sentido horrio, diminuindo-
16/23
Eletrotcnica Motores Eltricos
se a resistncia do rotor. Na posio final, o rotor completamente curto-circuitado. Se o dispositivo for projetado de tal modo que as resistncias permaneam no circuito, o dispositivo de partida pode servir tambm como controlador de velocidade.
Figura 11 Resistncias para partida do MIT a rotor bobinado
2 Motores de Induo Monofsicos (MIM)
Muitas vezes se tem instalaes industriais e residenciais para as quais a alimentao feita com duas fases ou fase-neutro, necessitando-se de motores monofsicos. Os princpios bsicos dos motores monofsicos so similares aos dos MIT j apresentados. Como s existem duas fases ou uma fase e um neutro, vrias tcnicas so utilizadas para produzir o campo magntico girante necessrio para a partida dos motores de induo monofsicos. Este texto apresenta algumas delas e mostra tambm que uma vez que o rotor de u MIM comea a girar, m acionado pelo campo girante, continuar a funcionar com a alimentao monofsica. O rotor de um MIM normalmente do tipo gaiola e no h, como no MIT, ligao fsica entre o rotor e o estator, havendo sim um entreferro uniforme entre eles. As ranhuras do estator so normalmente distribudas e como um enrolamento monofsico simples no produz campo girante, nem torque de partida, este enrolamento dividido em duas partes, sendo cada uma delas deslocada no espao e no tempo e normalmente com caractersticas diferentes. Tem-se assim duas bobinas em paralelo, ambas ligadas mesma fonte CA. 2.1 Torque no MIM Seja um MIM com rotor em gaiola e um enrolamento distribudo ao longo do estator. Considerando o rotor parado, a figura 15.a mostra o campo magntico resultante, num instante em que se tem o sentido instantneo da esquerda para a direita. Os sentidos das correntes induzidas no rotor, por ao transformadora tambm so mostradas. Devido a lei de Lens, estas correntes esto num sentido tal que se opem ao campo que as produziu. Isto verificado atravs do sentido do campo devido corrente induzida nos condutores A e B.
17/23
Eletrotcnica Motores Eltricos
Figura 15 Torque equilibrado no rotor de um MIM O sentido do torque produzido pela interao entre a corrente induzida e o campo magntico em cada condutor do rotor mostrado pela seta em cada condutor (regra da mo esquerda: polegarfora, indicador-campo, mdio-corrente). O torque no sentido horrio produzido pelos condutores da metade direita superior do rotor equilibrado pelo torque anti-horrio, associado aos condutores da mesma metade inferior, o mesmo acontecendo com a metade esquerda. O torque lquido nulo. Quando muda o sentido da tenso CA, inverte-se tudo e da mesma maneira o torque lquido continua nulo. A figura 15.b mostra o torque pulsante para um ciclo de tenso aplicada pela fonte CA em um condutor do rotor, cujo valor mdio nulo. Qualquer torque pulsante pode tambm ser representado como consistindo de dois torques girando em oposio e tendo campos de igual magnitude e velocidade angular, como mostra a figura 15.c. Na figura 15.d so apresentados, em linha tracejada, os torques devidos a 1 e 2 . Cada um destes torques equivale ao torque resultante devido ao campo girante de um MIT, girando no sentido apropriado. A composio dos dois torques representa o torque efetivo aplicado ao MIM (linha cheia da figura 15.d). Conforme pode-se observar nesta figura, o torque resultante ser nulo apenas quando o motor girar a velocidade sncrona em qualquer sentido ou quando o motor estiver parado, de tal modo que uma vez que o motor comea a girar num dado sentido, ele continuar a girar at que a alimentao seja retirada.
18/23
Eletrotcnica Motores Eltricos
2.2.5 Motor Universal Sempre houve necessidade de um motor que pudesse ser utilizado em aplicaes portteis e que pudesse funcionar em quaisquer freqncias, a partir de fontes de energia diferentes, ou seja nveis de tenso diferentes. O motor universal projetado para freqncias comerciais variando de 0 at 60 Hz e para tenses de 1,5 a 250 V. A figura 20.a apresenta o esquema do motor, que tem o rotor em srie com a bobina do estator, sendo a corrente conduzida ao rotor por meio de escovas, de modo que quando se inverte a polaridade da fonte, invertem-se tambm a polaridade do campo e o sentido das correntes na armadura (rotor), continuando a ser produzido torque no mesmo sentido como se v nos itens (b) e (c) da figura.
(a)
Motor Srie
(b) Sentido de correntes no primeiro meio ciclo
(c)
Sentido de correntes no segundo meio ciclo
Figura 20 Operao do motor srie ou universal O motor universal , por suas caractersticas de construo, um motor fabricado at a potncia de 3/4 HP, podem a vazio apresentar uma velocidade elevada, necessitando de um sistema de engrenagens apropriado para que isto no ocorra. Podem ainda operar em qualquer freqncia, em vrios nveis de tenso, sendo usados em barbeadores eltricos, mquinas de costura, furadeiras, secadores de cabelo, aspiradores de p, etc.
19/23
Eletrotcnica Motores Eltricos
3 Mquina Sncrona
A mquina sncrona, de acordo com a localizao do campo, pode ser de dois tipos. Na de campo fixo o estator constitudo por uma estrutura cilndrica de ao ou ferro fundido ou laminado, permitindo o retorno do fluxo para o circuito magntico criado pelos enrolamentos de campo, consistindo de espiras enroladas nas sapatas polares e alimentadas por corrente contnua. O enrolamento da armadura colocado no rotor levado a anis coletores conforme mostra a figura 21 (a), alimentada por CA caso a mquina seja utilizada como motor. A figura 21 (b) mostra um conversor sncrono, que utilizado para converter corrente contnua em alternada e vice versa. Se corrente contnua aplicada s escovas e potncia mecnica ao seu eixo, a mquina funciona como gerador CA.
Figura 21 Mquina sncrona de campo fixo Na mquina sncrona de campo mvel, figura 22, o enrolamento de campo colocado no rotor e alimentado por uma fonte de CC atravs de dois anis coletores e a armadura idntica ao estator do MIT, alimentada por fonte CA trifsica, no caso de funcionamento como motor ou carga, quando potncia mecnica fornecida ao seu eixo, no caso de funcionamento como gerador. Na figura 22 temos dois tipos de rotor: o de plos salientes (a) e o de plos no salientes (b), neste caso, de 4 plos, sendo mostradas as conexes da armadura.
Figura 22 Mquina sncrona de campo mvel 3.1 Motor Sncrono (MS) O motor sncrono possui o estator idntico ao do motor de induo t ifsico, que ao ser r alimentado por tenso alternada trifsica produz o campo girante constante, girando na velocidade sncrona. Existe um outro campo no rotor, criado pela alimentao das bobinas das sapatas polares por tenso contnua atravs dos anis c oletores. Conforme veremos a seguir, o MS por si s no tem
20/23
Eletrotcnica Motores Eltricos
torque de partida, devendo ser acelerado por algum meio auxiliar. Uma maneira utilizar o enrolamento amortecedor ou de compensao ou ainda em gaiola de esquilo para a partida, que consiste de barras slidas embutidas na superfcie da face polar e curto-circuitadas em cada extremidade por meio de anis conforme mostra a figura 23.
Figura 23 Plo de um MS mostrando o enrolamento de compensao 3.1.1 Operao do Motor Sncrono Seja uma tenso trifsica aplicada ao estator de um motor sncrono, num instante em que as correntes em cada bobina so mostradas na figura 24 (a), com a corrente na bobina a-a na posio1 da figura 24 (b).
a i b' c' 1
S
c a' (a) (b) b 2
Figura 24 Rotor parado e corrente na bobina a-a Devido aos plos criados pelo campo (motor de 2 plos) um condutor se encontra sobre o plo N e outro sob o plo S. Da interao entre a corrente no condutores (superior e inferior) e os campos, como o condutor fixo, a face polar superior fica sujeito a um torque para a direita, enquanto que a face polar inferior fica sujeito a um torque para a esquerda, como mostra a figura 25.a. Portanto, o rotor fica sujeito a um torque que tenderia a move-lo no sentido horrio. Para a corrente na posio 2 da figura 24.b se tem a inverso da corrente e o rotor fica sujeito a um torque que tenderia a move-lo no sentido anti-horrio, em conseqncia das interaes mostradas na figura 25.b.
21/23
Eletrotcnica Motores Eltricos
CASO 1 Repulso a
CASO 2 Atrao a
X
Atrao Repulso
(a)
Atrao a' a'
Repulso (b)
X
Repulso Atrao
Figura 25 Interaes entre linhas de campo Devido inrcia do rotor, o torque produzido em um segundo nulo pois o rotor foi efetivamente atrado alternativamente, nos sentidos horrio e anti-horrio, 60 vezes naquele segundo, para a freqncia de 60 Hz. Se o rotor for levado at a velocidade sncrona, no momento em que se inverter o sentido da corrente, inverte-se o campo, o que far com que se tenha um torque lquido. Os plos N e S do rotor, girando a uma velocidade sncrona, entram em sincronismo com o campo magntico girante. Se for adicionada uma carga ao eixo da mquina, o contra-torque criado por ela far com que o rotor se atrase momentaneamente, porm se uma carga excessiva for adiciona a ponto do rotor sair do sincronismo, o motor pra de funcionar. Logo um motor sncrono ou funciona velocidade sncrona ou no funciona. 3.1.2 Partida de Motores Sncronos evidente, ento, que se deve trazer o rotor a uma velocidade suficiente prxima da sncrona, para ocorrer o sincronismo com o campo girante. Alguns dos meios para que isto acontea so: a) utilizar um motor acoplado ao eixo do MS, que se for de induo deve ter, no mnimo, um par de plos a menos que os do motor sncrono. b) a utilizao dos enrolamentos de compensao. Na partida com enrolamentos de compensao deve-se curto-circuitar o enrolamento de CC enquanto se aplica CA ao estator, trazendo o motor at sua velocidade a vazio como um motor de induo. Em seguida remove-se o curto-circuito do campo e aplica-se tenso CC este enrolamento, ajustando-se a corrente (pode-se variar o nvel de tenso CC ou o valor da resistncia de campo) para que ela seja mnima. Na partida sob carga, a melhor tcnica utilizar um rotor bobinado em lugar do enrolamento em gaiola nas faces polares, ou seja, o chamado enrolamento de compensao tipo rotor bobinado. A figura 26 mostra um diagrama esquemtico, onde se utiliza acoplado ao enrolamento de campo, uma resistncia trifsica. O motor parte com toda a resistncia externa por fase e com o enrolamento de campo curto-circuitado. A medida que se diminui a resistncia, o rotor se aproxima da velocidade sncrona e aps ela ser atingida, aplica-se uma tenso contnua ao campo.
22/23
Eletrotcnica Motores Eltricos
Figura 26 Diagrama para partida do motor sncrono bobinado sob carga 3.1.3 Caractersticas de Funcionamento O MS tem duas fontes de excitao possveis: a da fonte trifsica CA na armadura e a de CC no enrolamento de campo. Se a corrente de campo exatamente suficiente para produzir a fmm necessria, no se necessitando de corrente de magnetizao ou potncia reativa, o motor funciona com fator de potncia unitrio. Se a corrente de campo menor que a suficiente (se diz que o motor est subexcitado) a deficincia em fmm precisa ser suprida pela armadura, o motor funciona com fator de potncia atrasado. Se a corrente de campo maior que o necessrio ( se diz que o motor esta sobreexcitado) o excesso de fmm deve ser contrabalanceado na armadura e uma componente de corrente adiantada est presente, o motor funciona com fator de potncia adiantado. O motor sncrono quando funcionando na condio de sobreexcitado e a vazio recebe o nome de condensador sncrono e desempenha a mesma funo de um banco de capacitores, sendo mais econmico que os capacitores estticos.
23/23
Você também pode gostar
- Livro de Biologia AveoDocumento171 páginasLivro de Biologia AveoVictor Mbanji100% (5)
- FILHOS DAS ESTRELAS - Crianças Índigos, Violetas, Esmeraldas, Cristais, Douradas, Arco-ÍrisDocumento38 páginasFILHOS DAS ESTRELAS - Crianças Índigos, Violetas, Esmeraldas, Cristais, Douradas, Arco-ÍrisGuilherme SantosAinda não há avaliações
- Etica No Trabalho PsicopedagogicoDocumento45 páginasEtica No Trabalho PsicopedagogicoProf. Guilherme GonçalvesAinda não há avaliações
- Questionário de Avaliação Da FormaçãoDocumento2 páginasQuestionário de Avaliação Da FormaçãoDaniela FernandesAinda não há avaliações
- Apostila CADDocumento149 páginasApostila CADLetícia100% (1)
- Homeopatia e Principios Alquimicos - Agricultura OrganicaDocumento186 páginasHomeopatia e Principios Alquimicos - Agricultura OrganicaBruna Ribas Russ100% (1)
- BetoneiraDocumento31 páginasBetoneiraedusampaioAinda não há avaliações
- Sistema Respiratório - Mini TesteDocumento4 páginasSistema Respiratório - Mini TesteLuís SemeanoAinda não há avaliações
- Devoção Dos Cinco Primeiros SábadosDocumento2 páginasDevoção Dos Cinco Primeiros SábadosCleiton B CostaAinda não há avaliações
- A Lua No CinemaDocumento5 páginasA Lua No CinemaMilena GuedesAinda não há avaliações
- Aulas Formação para A CidadaniaDocumento4 páginasAulas Formação para A CidadaniaTiago Silva100% (1)
- Lista de ComponentesDocumento1 páginaLista de ComponentesLetíciaAinda não há avaliações
- Sensores 1Documento9 páginasSensores 1LetíciaAinda não há avaliações
- Edital Concurso CompletoDocumento27 páginasEdital Concurso CompletoAntonio Fonseca JuniorAinda não há avaliações
- Ligação IonicaDocumento3 páginasLigação IonicaLetíciaAinda não há avaliações
- 1347353166queda TensaoDocumento2 páginas1347353166queda TensaoburdinskiAinda não há avaliações
- Física 21Documento27 páginasFísica 21Renata PessoaAinda não há avaliações
- Relatório - Titulação Ácido-BseDocumento7 páginasRelatório - Titulação Ácido-BseLetíciaAinda não há avaliações
- Fiísca 2003 FechadasDocumento13 páginasFiísca 2003 FechadasLetíciaAinda não há avaliações
- Unicamp 1 FDocumento15 páginasUnicamp 1 FLetíciaAinda não há avaliações
- Exercicicos Resolvidos de FisicaDocumento73 páginasExercicicos Resolvidos de FisicaFerreiraCursosAinda não há avaliações
- C1R - Lista 16Documento1 páginaC1R - Lista 16Ianka NunesAinda não há avaliações
- Antibióticos X Bactérias - A Corrida Do Século - SuperinteressanteDocumento4 páginasAntibióticos X Bactérias - A Corrida Do Século - SuperinteressanteThais Ewerton100% (1)
- Livro Os NazarenosDocumento21 páginasLivro Os NazarenosWeberton HenriqueAinda não há avaliações
- PG04-Propagacao de Onda em Dieletricos Com PerdaDocumento4 páginasPG04-Propagacao de Onda em Dieletricos Com PerdaTobias Salazar BarbosaAinda não há avaliações
- Texto Sobre Legalização Da MaconhaDocumento1 páginaTexto Sobre Legalização Da MaconhaAmareloAinda não há avaliações
- Boas Práticas de Manipulação de Produtos EstéreisDocumento12 páginasBoas Práticas de Manipulação de Produtos EstéreisgbmmmAinda não há avaliações
- FilekDocumento4 páginasFilekEwerton GuimarãesAinda não há avaliações
- FISPQ Monoetilenoglicol (MEG)Documento8 páginasFISPQ Monoetilenoglicol (MEG)Wanderson CaldeiraAinda não há avaliações
- Bula 1661445962942Documento12 páginasBula 1661445962942Marco AntonioAinda não há avaliações
- Criptografando e Descriptografando Dados Com NodeJSDocumento10 páginasCriptografando e Descriptografando Dados Com NodeJSPaulo Eduardo TozziAinda não há avaliações
- Fala Conscienc. 7Documento136 páginasFala Conscienc. 7victoria juliaAinda não há avaliações
- S Ou Z e Outros para DitadoDocumento47 páginasS Ou Z e Outros para DitadoAlbertefernandaOliveiraAinda não há avaliações
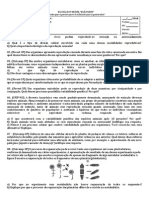
- Exercícios de Reprodução Sexuada e AssexuadaDocumento2 páginasExercícios de Reprodução Sexuada e AssexuadaSheila Souza Vieira100% (4)
- Edital 31020703Documento16 páginasEdital 31020703WILLIAN OLIVEIRAAinda não há avaliações
- Roteiro para o Trabalho de Educação FísicaDocumento2 páginasRoteiro para o Trabalho de Educação FísicaTulio KuriiwaAinda não há avaliações
- 2 LISTA DE RESIST 2 ESTRUT 3 Torção PDFDocumento3 páginas2 LISTA DE RESIST 2 ESTRUT 3 Torção PDFfranciscomarcio_engAinda não há avaliações
- Cumprindo A Missão: Marcos 16:15Documento9 páginasCumprindo A Missão: Marcos 16:15William SilvaAinda não há avaliações
- Artigo Implicações Renais Do Hipertireoidismo Felino - RevisãoDocumento7 páginasArtigo Implicações Renais Do Hipertireoidismo Felino - RevisãoLulua AmaralAinda não há avaliações
- Aventuras Na Oração.Documento76 páginasAventuras Na Oração.lucivaldoAinda não há avaliações
- Tóp Revolução Inglesa, Revolução Francesa, Rev Americana Independencia América EspanholaDocumento2 páginasTóp Revolução Inglesa, Revolução Francesa, Rev Americana Independencia América EspanholaHellen OliveiraAinda não há avaliações