Você também pode gostar
- Configuracao OPC Simatic NetDocumento6 páginasConfiguracao OPC Simatic NetiuctmeAinda não há avaliações
- Tutorial - Configuração Digigate Profibus-DP Com S7-300Documento3 páginasTutorial - Configuração Digigate Profibus-DP Com S7-300iuctmeAinda não há avaliações
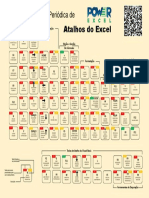
- Tabela Periodica Excel PDFDocumento1 páginaTabela Periodica Excel PDFiuctmeAinda não há avaliações
- Configuracao Rapida Do MicromasterDocumento6 páginasConfiguracao Rapida Do MicromasteriuctmeAinda não há avaliações
- NR-12 (Anexo I)Documento5 páginasNR-12 (Anexo I)Lindomar Santana MendonçaAinda não há avaliações
- Princípios Essenciais Das Pessoas Altamente EficazesDocumento5 páginasPrincípios Essenciais Das Pessoas Altamente EficazesiuctmeAinda não há avaliações
- Catalogo Medidores de Vazao IncontrolDocumento10 páginasCatalogo Medidores de Vazao IncontroliuctmeAinda não há avaliações
- TýýCNICODocumento52 páginasTýýCNICOtiaoadmAinda não há avaliações
- Coroinhas e AcólitosDocumento39 páginasCoroinhas e Acólitosiuctme100% (1)
- Calculo III Livro CompletoDocumento133 páginasCalculo III Livro Completogffonseca1987Ainda não há avaliações
- Pré CálculoDocumento3 páginasPré CálculoThiago MedeirosAinda não há avaliações
- Excel 2016 Aula 3Documento31 páginasExcel 2016 Aula 3orlandonunes3Ainda não há avaliações
- Re82137 Ny12 Ficha Revisao 4Documento5 páginasRe82137 Ny12 Ficha Revisao 4Alice CorreiaAinda não há avaliações
- Gabarito AFA2014 Comentadas PDFDocumento53 páginasGabarito AFA2014 Comentadas PDFkartegiane5verasAinda não há avaliações
- TEMA 7 - Fundamentos de Programação Funcional (SLIDES)Documento37 páginasTEMA 7 - Fundamentos de Programação Funcional (SLIDES)Carlos IgorAinda não há avaliações
- G00 Interpolação Linear Com Avanço RápidoDocumento13 páginasG00 Interpolação Linear Com Avanço RápidoQuelton NgulubeAinda não há avaliações
- Funçoes de Variaveis ComplexDocumento6 páginasFunçoes de Variaveis ComplexJohnny AlouizorAinda não há avaliações
- Limites e FunçõesDocumento12 páginasLimites e FunçõesPati PauliAinda não há avaliações
- Artigo Científico Sobre Descrição de Cargos - 15mai2018Documento18 páginasArtigo Científico Sobre Descrição de Cargos - 15mai2018Luciano ReisAinda não há avaliações
- Pagmo 2021Documento2 páginasPagmo 2021kauavictor200803Ainda não há avaliações
- FUNÇÕES INVERSA COMPOSTA INJETORA L MATEMÁTICA BIZURADADocumento1 páginaFUNÇÕES INVERSA COMPOSTA INJETORA L MATEMÁTICA BIZURADARafael GomesAinda não há avaliações
- GuiaCompMat-2 e 3vol PDFDocumento198 páginasGuiaCompMat-2 e 3vol PDFDrumom AndrAinda não há avaliações
- Pesquisa Função SeDocumento14 páginasPesquisa Função SemosconidossantoslavinyaAinda não há avaliações
- Prova IFPI 1 PDFDocumento14 páginasProva IFPI 1 PDFIsabella A MartinsAinda não há avaliações
- 201 - Caderno Aux. Ativi. Compl. EM - TiDocumento120 páginas201 - Caderno Aux. Ativi. Compl. EM - Tigilson costaAinda não há avaliações
- Estruturas Principais Da Programacao No Arduino v1Documento29 páginasEstruturas Principais Da Programacao No Arduino v1Flávio TorresAinda não há avaliações
- Lista 02 Sobre Função LinearDocumento5 páginasLista 02 Sobre Função LinearRYAN MATHEUSAinda não há avaliações
- Função Quadrática e Aplicações - Recuperação Do 10º AnoDocumento10 páginasFunção Quadrática e Aplicações - Recuperação Do 10º AnoHappyPantasAinda não há avaliações
- Artigo para Resumo Sobre ManutençãoDocumento19 páginasArtigo para Resumo Sobre ManutençãoEng. Júlio CésarAinda não há avaliações
- FUNÇÃO 1oGRAU UERJDocumento3 páginasFUNÇÃO 1oGRAU UERJportela2008Ainda não há avaliações
- Planificação 7ºDocumento9 páginasPlanificação 7ºSusana VelosoAinda não há avaliações
- Teste 7 AbrilDocumento5 páginasTeste 7 AbrilJosé Manuel Santos GabrielAinda não há avaliações
- CNC - P2 - Aplicação Da Interpolação Quadrática Na Descrição Do Movimento de Um Corpo em Queda LivreDocumento5 páginasCNC - P2 - Aplicação Da Interpolação Quadrática Na Descrição Do Movimento de Um Corpo em Queda LivreInaldo VianaAinda não há avaliações
- Teste 12 V1-21 Jan 20Documento2 páginasTeste 12 V1-21 Jan 20monteiro.gabriela38769Ainda não há avaliações
- Slides de Clculo I - Limites EDocumento88 páginasSlides de Clculo I - Limites EAlessandro GonçalvesAinda não há avaliações
- NBR 5462 - Confiabilidade e MantenabilidadeDocumento37 páginasNBR 5462 - Confiabilidade e MantenabilidadeEulalia Cristina100% (1)
- D27 - Identificar A Representação Algébrica e Ou Gráfica de Uma Função Exponencial.Documento2 páginasD27 - Identificar A Representação Algébrica e Ou Gráfica de Uma Função Exponencial.anchieta junior100% (9)
- Caderno de Apoio Ao ProfessorDocumento332 páginasCaderno de Apoio Ao ProfessorduraoruteAinda não há avaliações
- Módulo 17 - Revisão 3Documento5 páginasMódulo 17 - Revisão 3Marcos AntonioAinda não há avaliações