Você também pode gostar
- MEF 02 Codificacao Switch CaseDocumento11 páginasMEF 02 Codificacao Switch CasexbarretoxAinda não há avaliações
- FTC 2023 02 SistemasFormais 05 Linguagem Repeticao KleeneDocumento14 páginasFTC 2023 02 SistemasFormais 05 Linguagem Repeticao KleenexbarretoxAinda não há avaliações
- LPAvES Multithreading 01 Criacao ThreadsDocumento37 páginasLPAvES Multithreading 01 Criacao ThreadsxbarretoxAinda não há avaliações
- FTC 2023 02 SistemasFormais 03 ExemploDocumento24 páginasFTC 2023 02 SistemasFormais 03 ExemploxbarretoxAinda não há avaliações
- TEES Arduino PushButton 04Documento8 páginasTEES Arduino PushButton 04xbarretoxAinda não há avaliações
- LPAvES 2023 01 01 Introducao Concorrencia ResumoDocumento28 páginasLPAvES 2023 01 01 Introducao Concorrencia ResumoxbarretoxAinda não há avaliações
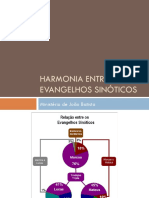
- 01 Ministerio Joao BatistaDocumento48 páginas01 Ministerio Joao BatistaxbarretoxAinda não há avaliações
- TEES Arduino PushButton 02Documento11 páginasTEES Arduino PushButton 02xbarretoxAinda não há avaliações
- MEF 01 DefinicaoDocumento17 páginasMEF 01 DefinicaoxbarretoxAinda não há avaliações
- TEES Arduino PushButton 01Documento9 páginasTEES Arduino PushButton 01xbarretoxAinda não há avaliações
- TEES Arduino PushButton 03Documento10 páginasTEES Arduino PushButton 03xbarretoxAinda não há avaliações
- Sistemas de Tempo-RealDocumento17 páginasSistemas de Tempo-RealxbarretoxAinda não há avaliações
- AED1 04 Raciocinio Parte2Documento42 páginasAED1 04 Raciocinio Parte2xbarretoxAinda não há avaliações
- Wearables 20170401Documento46 páginasWearables 20170401xbarretoxAinda não há avaliações
- Deteccao ErrosDocumento14 páginasDeteccao ErrosxbarretoxAinda não há avaliações
- AED1 02 IntroducaoDocumento47 páginasAED1 02 IntroducaoxbarretoxAinda não há avaliações
- AED1 03 Raciocinio Parte1Documento42 páginasAED1 03 Raciocinio Parte1xbarretoxAinda não há avaliações
- Aed1 07 HallDocumento65 páginasAed1 07 HallxbarretoxAinda não há avaliações
- ISE 07 MEFsDocumento31 páginasISE 07 MEFsxbarretoxAinda não há avaliações
- Sistemas de NumeracaoDocumento64 páginasSistemas de NumeracaoxbarretoxAinda não há avaliações
- Aed1 07 PortugolDocumento32 páginasAed1 07 Portugolxbarretox100% (1)
- AED1 03 Logico DedutivoDocumento26 páginasAED1 03 Logico DedutivoxbarretoxAinda não há avaliações
- Sistemas de Tempo-RealDocumento13 páginasSistemas de Tempo-Realxbarretox0% (1)
- AED1 Estrutura ComputadorDocumento56 páginasAED1 Estrutura ComputadorxbarretoxAinda não há avaliações
- AED1 06 Nassi SchneidermanDocumento11 páginasAED1 06 Nassi SchneidermanxbarretoxAinda não há avaliações
- Sistemas de Tempo-Real Escalonamento Parte IIDocumento18 páginasSistemas de Tempo-Real Escalonamento Parte IIxbarretoxAinda não há avaliações
- Sistemas de Tempo-Real Escalonamento Parte I - AlgoritmosDocumento54 páginasSistemas de Tempo-Real Escalonamento Parte I - AlgoritmosxbarretoxAinda não há avaliações
- Quest 07 - Revisão - GabDocumento8 páginasQuest 07 - Revisão - GabmisaelinacioAinda não há avaliações
- Ficha de Trabalho - Tabela Periódica - 10º Ano QuímicaDocumento6 páginasFicha de Trabalho - Tabela Periódica - 10º Ano QuímicaTeresa CaldeiraAinda não há avaliações
- Filipetas Onduline Clássica FITDocumento2 páginasFilipetas Onduline Clássica FIT1otoAinda não há avaliações
- Apostila de Brigada de EmergênciaDocumento37 páginasApostila de Brigada de EmergênciaLucas SerranoAinda não há avaliações
- Oxidação e MetabolismoDocumento7 páginasOxidação e MetabolismoVictor Simão NetoAinda não há avaliações
- Manual Sistema DGPark WEB Rev1 PDFDocumento10 páginasManual Sistema DGPark WEB Rev1 PDFDomParking MinhaVagaAinda não há avaliações
- Manual Fresamento NX8Documento62 páginasManual Fresamento NX8abelmil123Ainda não há avaliações
- 2021 2022 01 Exp9 Teste1 Movimentos Na Terra Ae EstruturaDocumento2 páginas2021 2022 01 Exp9 Teste1 Movimentos Na Terra Ae EstruturaSandra FariaAinda não há avaliações
- Complexacao ESALQ PDFDocumento176 páginasComplexacao ESALQ PDFGaby Salazar Mogollón100% (1)
- Automação e ControleDocumento268 páginasAutomação e ControleWASHINGTONAinda não há avaliações
- Teoria de Redes PPoEDocumento8 páginasTeoria de Redes PPoEJhenefer SilvaAinda não há avaliações
- Receitas - Clara de SousaDocumento10 páginasReceitas - Clara de SousaAna AbreuAinda não há avaliações
- Aula 1 - 06 e 07 - 12 - 2022Documento85 páginasAula 1 - 06 e 07 - 12 - 2022pretteluizAinda não há avaliações
- Exercicio - de - Fixacao Balanço de MassasDocumento1 páginaExercicio - de - Fixacao Balanço de MassasSamantha RibeiroAinda não há avaliações
- Revisao SimuladoDocumento2 páginasRevisao SimuladovalimjosineiAinda não há avaliações
- Como Usar A HP-50g para CalculoDocumento12 páginasComo Usar A HP-50g para CalculoEliezerAinda não há avaliações
- Aula 1 - Introdução A Estradas de Rodagem e Projeto GeométricoDocumento51 páginasAula 1 - Introdução A Estradas de Rodagem e Projeto GeométricoFabrício GuimarãesAinda não há avaliações
- Stanadyne DE10 Pump (001-050) .En - PTDocumento50 páginasStanadyne DE10 Pump (001-050) .En - PTwillyan100% (2)
- Instalação de (SWC) Chevrolet CapitivaDocumento11 páginasInstalação de (SWC) Chevrolet CapitivaAndre LucieneAinda não há avaliações
- Manual Usuario - Manual DVDocumento5 páginasManual Usuario - Manual DVGisseli MontanariAinda não há avaliações
- Lista de Trabalhos 4 - CiclonagemDocumento3 páginasLista de Trabalhos 4 - CiclonagemLuana Macedo100% (1)
- Materia Matematica Curso SoluçaoDocumento8 páginasMateria Matematica Curso SoluçaoJean LucasAinda não há avaliações
- 367891-Exercício PascalzimDocumento4 páginas367891-Exercício PascalzimDiego OliveiraAinda não há avaliações
- Destilação DiferencialDocumento17 páginasDestilação DiferencialLuis Guilherme Foresto100% (1)
- PPR - DelineadoresDocumento1 páginaPPR - DelineadoresleticiaAinda não há avaliações
- MATEMÁTICADocumento118 páginasMATEMÁTICASuelen SantosAinda não há avaliações
- 001 Manual Esteira Atheltic RunnerDocumento8 páginas001 Manual Esteira Atheltic RunnerLulii RisottoAinda não há avaliações
- PFD BPA Final-Páginas-1Documento1 páginaPFD BPA Final-Páginas-1Luiz Rodrigo AssisAinda não há avaliações
- Aula 5 - Teoria Da ComputaçãoDocumento12 páginasAula 5 - Teoria Da ComputaçãoCristianeAinda não há avaliações
- Balanceamento de Maquinas Rotativas Com 1 Ou 2 Planos de Correcao PDFDocumento6 páginasBalanceamento de Maquinas Rotativas Com 1 Ou 2 Planos de Correcao PDFset_ltdaAinda não há avaliações