Você também pode gostar
- Portugues Petrobras Aula05 PDFDocumento80 páginasPortugues Petrobras Aula05 PDFNildo TrindadeAinda não há avaliações
- Portugues Petrobras Aula01 PDFDocumento57 páginasPortugues Petrobras Aula01 PDFNildo TrindadeAinda não há avaliações
- Portugues Petrobras Aula04 PDFDocumento62 páginasPortugues Petrobras Aula04 PDFNildo TrindadeAinda não há avaliações
- Portugues Petrobras Aula03 PDFDocumento65 páginasPortugues Petrobras Aula03 PDFNildo TrindadeAinda não há avaliações
- Portugues Petrobras Aula00 PDFDocumento100 páginasPortugues Petrobras Aula00 PDFNildo TrindadeAinda não há avaliações
- Instrucoes - Funcionamento Usca StemacDocumento103 páginasInstrucoes - Funcionamento Usca Stemacortolane10100% (39)
- Petro 007 7 PDFDocumento15 páginasPetro 007 7 PDFNildo TrindadeAinda não há avaliações
- Edicao 18Documento40 páginasEdicao 18Nildo TrindadeAinda não há avaliações
- MA52 WebDocumento52 páginasMA52 WebLuiz Mauro XavierAinda não há avaliações
- Inversor de Frequencia - Conceito e Tecnicas de AplicacaoDocumento150 páginasInversor de Frequencia - Conceito e Tecnicas de AplicacaoNildo TrindadeAinda não há avaliações
- Documento 123000000 TDDocumento11 páginasDocumento 123000000 TDthe bestAinda não há avaliações
- Monitor Signos Cardiocap-Manual-do-usuarioDocumento48 páginasMonitor Signos Cardiocap-Manual-do-usuarioJuan P SalazarAinda não há avaliações
- Edital Pcpa Escrivão EsquematizadoDocumento6 páginasEdital Pcpa Escrivão EsquematizadoLucas BritoAinda não há avaliações
- As Regras Gerais Da Técnica de Segurança Na OficinaDocumento2 páginasAs Regras Gerais Da Técnica de Segurança Na OficinaËnesson VicenteAinda não há avaliações
- Modelo de Formulário de ReclamaçãoDocumento2 páginasModelo de Formulário de ReclamaçãoMagno Fernando da Fonseca100% (3)
- Leia Atentamente As Instruções AbaixoDocumento9 páginasLeia Atentamente As Instruções AbaixoLaura SabrinaAinda não há avaliações
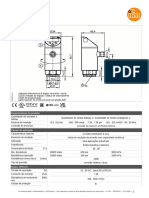
- Sensor de Pressão Com Display: PN-+,5BRER14-MFRKG/US/ /VDocumento5 páginasSensor de Pressão Com Display: PN-+,5BRER14-MFRKG/US/ /VIvan FerreiraAinda não há avaliações
- Mca501 - Avaliativa Sem1 UnivespDocumento2 páginasMca501 - Avaliativa Sem1 Univespfelipeaugusto.cba2023Ainda não há avaliações
- Brastemp BWK11ABANADocumento10 páginasBrastemp BWK11ABANAFrancisco Fernando Souza100% (1)
- Cap 7 Lab 7.4.7-Lab - Install-The-Virtual-Machine - PT-BRDocumento5 páginasCap 7 Lab 7.4.7-Lab - Install-The-Virtual-Machine - PT-BREdmar BrasilAinda não há avaliações
- Lista04 VetoresDocumento3 páginasLista04 VetoresMaicom RezaAinda não há avaliações
- Prova de WorkshopDocumento3 páginasProva de WorkshopKELLY TAIANE LOPESAinda não há avaliações
- Atividade Caca Ao TesouroDocumento10 páginasAtividade Caca Ao TesouroLUIS VICENTE FerreiraAinda não há avaliações
- TV Globo - Boletim de Informação para Publicitários - Nº 570Documento8 páginasTV Globo - Boletim de Informação para Publicitários - Nº 570Bernardo von FlachAinda não há avaliações
- C1-Conhecendo A Interface Do AutocadDocumento21 páginasC1-Conhecendo A Interface Do Autocadhru5775lcsAinda não há avaliações
- Tipos de Dados em Pascal PDFDocumento7 páginasTipos de Dados em Pascal PDFdinsouza1Ainda não há avaliações
- Mulan Sereia MulanDocumento3 páginasMulan Sereia MulanCrisma Crisma100% (3)
- Relogio No BlenderDocumento9 páginasRelogio No BlenderWagneroxAinda não há avaliações
- Semana 2 - Guia-Pratico - Instalação e Configuração Do Ambiente de Desenvolvimento Web - Parte2 - Linux - Desenvolvimento Web - COM320 - RevDocumento11 páginasSemana 2 - Guia-Pratico - Instalação e Configuração Do Ambiente de Desenvolvimento Web - Parte2 - Linux - Desenvolvimento Web - COM320 - RevJezebel GuedesAinda não há avaliações
- Tec Seguranca TrabalhoDocumento16 páginasTec Seguranca Trabalhojfn29Ainda não há avaliações
- Projeto Integrado de Programação e OrganizaçãoDocumento11 páginasProjeto Integrado de Programação e OrganizaçãoAirdrops Andrel100% (1)
- Vantagens e Desvantagens de Uma MaquinaDocumento1 páginaVantagens e Desvantagens de Uma MaquinaClaudio VisonaAinda não há avaliações
- CIBERNÉTICA A Arte de Guiar Navios (E o Estado)Documento19 páginasCIBERNÉTICA A Arte de Guiar Navios (E o Estado)Alisson S. BarbosaAinda não há avaliações
- Itil Simulado 2Documento29 páginasItil Simulado 2renan silvaAinda não há avaliações
- Kit Inicial 2013-FiskDocumento5 páginasKit Inicial 2013-Fiskhnet0% (2)
- HS02Documento7 páginasHS02Fabio AiresAinda não há avaliações
- MDH001N - 016N - 020N 90 240vca P299 PDFDocumento2 páginasMDH001N - 016N - 020N 90 240vca P299 PDFLuciano CesarAinda não há avaliações
- WEG Pfw01 Manual Controlador AutomaticoDocumento40 páginasWEG Pfw01 Manual Controlador AutomaticoDiego AndradeAinda não há avaliações
- Conta de EnergiaDocumento1 páginaConta de Energiacarlos eduardoAinda não há avaliações
- Relatório de Estágio Do Curso de Desenvolvimento de Produtos MultimédiaDocumento63 páginasRelatório de Estágio Do Curso de Desenvolvimento de Produtos MultimédiaSérgio PinaAinda não há avaliações