Você também pode gostar
- Manual Usuario - Manual DVDocumento5 páginasManual Usuario - Manual DVGisseli MontanariAinda não há avaliações
- Fichas de Salgados CPTDocumento32 páginasFichas de Salgados CPTRegina HelenaAinda não há avaliações
- Manual Sistema DGPark WEB Rev1 PDFDocumento10 páginasManual Sistema DGPark WEB Rev1 PDFDomParking MinhaVagaAinda não há avaliações
- 4 ATIVIDADE 1º ANO - Matematica. 4º Periodo - Prof. JOACYDocumento3 páginas4 ATIVIDADE 1º ANO - Matematica. 4º Periodo - Prof. JOACYGustavo AssunçãoAinda não há avaliações
- Lista de Trabalhos 4 - CiclonagemDocumento3 páginasLista de Trabalhos 4 - CiclonagemLuana Macedo100% (1)
- Materia Matematica Curso SoluçaoDocumento8 páginasMateria Matematica Curso SoluçaoJean LucasAinda não há avaliações
- Exercicio - de - Fixacao Balanço de MassasDocumento1 páginaExercicio - de - Fixacao Balanço de MassasSamantha RibeiroAinda não há avaliações
- QG Exercã Cios - EstequiometriaDocumento20 páginasQG Exercã Cios - EstequiometriaToni FariasAinda não há avaliações
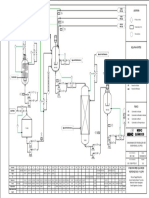
- PFD BPA Final-Páginas-1Documento1 páginaPFD BPA Final-Páginas-1Luiz Rodrigo AssisAinda não há avaliações
- Mzup3 Fichas Recuperacao 2anoDocumento32 páginasMzup3 Fichas Recuperacao 2anoBeatriz Galharda de LavosAinda não há avaliações
- Filipetas Onduline Clássica FITDocumento2 páginasFilipetas Onduline Clássica FIT1otoAinda não há avaliações
- Relatorio de Produção Magnésio MetálicoDocumento39 páginasRelatorio de Produção Magnésio MetálicoSidney OliveiraAinda não há avaliações
- Ap Matemática 6 Série EfDocumento304 páginasAp Matemática 6 Série EfAlexandre MarianoAinda não há avaliações
- Slides de Tecnologia Mecanica 17.07.18BDocumento5 páginasSlides de Tecnologia Mecanica 17.07.18BAlfredo AlarAinda não há avaliações
- Transformações Lineares - SlidesDocumento20 páginasTransformações Lineares - SlidesFelipe BarbosaAinda não há avaliações
- Método para Bateria Por Daniel BateraDocumento31 páginasMétodo para Bateria Por Daniel BateraDaniel SilvaAinda não há avaliações
- Resumo - BiomecanicaDocumento9 páginasResumo - BiomecanicaSandraMorethAinda não há avaliações
- Lista de Exercícios - SoluçõesDocumento3 páginasLista de Exercícios - SoluçõesJeane Rodrigues BrederAinda não há avaliações
- Análise de Causa RaizDocumento32 páginasAnálise de Causa Raizjulio_pastoreAinda não há avaliações
- Revisao SimuladoDocumento2 páginasRevisao SimuladovalimjosineiAinda não há avaliações
- Unidade 2 Desenvolvimento de Software para WebDocumento8 páginasUnidade 2 Desenvolvimento de Software para WebGustavo DE PaulaAinda não há avaliações
- Magia Do AmorDocumento273 páginasMagia Do AmorJoão Marques Ferreira67% (6)
- Quest 07 - Revisão - GabDocumento8 páginasQuest 07 - Revisão - GabmisaelinacioAinda não há avaliações
- Oficina Pedagogica - PLANO DE AULADocumento5 páginasOficina Pedagogica - PLANO DE AULAMara SilvaAinda não há avaliações
- Como Usar A HP-50g para CalculoDocumento12 páginasComo Usar A HP-50g para CalculoEliezerAinda não há avaliações
- Destilação DiferencialDocumento17 páginasDestilação DiferencialLuis Guilherme Foresto100% (1)
- Produtos C2 B5DX200 20Documento32 páginasProdutos C2 B5DX200 20CJ RosaAinda não há avaliações
- Densimetria de Materiais GranuladoDocumento5 páginasDensimetria de Materiais GranuladoGirlane SantosAinda não há avaliações
- Teoria de Redes PPoEDocumento8 páginasTeoria de Redes PPoEJhenefer SilvaAinda não há avaliações
- Aula - Dim Mancais de DeslizamentoDocumento34 páginasAula - Dim Mancais de Deslizamentohelton_bsbAinda não há avaliações