Você também pode gostar
- Conceitos Hardware - GRAN CURSOSDocumento117 páginasConceitos Hardware - GRAN CURSOSConstruFácil EmpreendimentosAinda não há avaliações
- KUKA EtherCat MURR Configuration - STEP by STEPDocumento17 páginasKUKA EtherCat MURR Configuration - STEP by STEPBruna Caroline ThomazAinda não há avaliações
- Introdução A Banco de Dados Modelagem Lógica - Introdução: I, C T CDocumento21 páginasIntrodução A Banco de Dados Modelagem Lógica - Introdução: I, C T CEdinelson Sousa JuniorAinda não há avaliações
- Ds Ruckus r610 PT BRDocumento6 páginasDs Ruckus r610 PT BRRegivaldo PereiraAinda não há avaliações
- Prova Idib Creci PeDocumento11 páginasProva Idib Creci PeLícia ReisAinda não há avaliações
- Regua TQSDocumento1 páginaRegua TQSjoão batista alves dos SantosAinda não há avaliações
- Treinamento Educacenso 2023Documento77 páginasTreinamento Educacenso 2023Andriele SantanaAinda não há avaliações
- WRN 240i Roteador WirelessDocumento3 páginasWRN 240i Roteador WirelessFernando FerreiraAinda não há avaliações
- NP EN 61439-1 Abril 2014 PDFDocumento1 páginaNP EN 61439-1 Abril 2014 PDFpuppix 4uAinda não há avaliações
- Garantia DeyeDocumento2 páginasGarantia DeyeLucas Ascendino AlvesAinda não há avaliações
- Introdução Ao AutoCAD 2D ATFDocumento3 páginasIntrodução Ao AutoCAD 2D ATFMárcia Vargas67% (3)
- TIC - Ficha de Trabalho Nº 8Documento4 páginasTIC - Ficha de Trabalho Nº 8lucas valezimAinda não há avaliações
- Prova Geral OkDocumento4 páginasProva Geral OkRo BertoAinda não há avaliações
- Dissertação Mestrado Andrew2Documento182 páginasDissertação Mestrado Andrew2Curtem O AzeitomaAinda não há avaliações
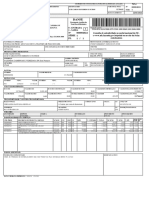
- Nf-E 4024 Luiz Carlos FigueiredoDocumento1 páginaNf-E 4024 Luiz Carlos FigueiredoAllan Higor Da silva ARAinda não há avaliações
- Atividade Prática Final - Administração Da ProduçãoDocumento2 páginasAtividade Prática Final - Administração Da Produçãomoisyoliveira20Ainda não há avaliações
- Delphi POO MVC DAO 04 PROJETODocumento2 páginasDelphi POO MVC DAO 04 PROJETOPascoal CastroAinda não há avaliações
- Estruturas de Dados Homogêneas Do Tipo Matriz em PythonDocumento16 páginasEstruturas de Dados Homogêneas Do Tipo Matriz em PythonShev ChenkoAinda não há avaliações
- 08 - Perito Criminal de Classe A Nivel I - Engenharia Eletrica - Tipo ADocumento28 páginas08 - Perito Criminal de Classe A Nivel I - Engenharia Eletrica - Tipo AMelk OliveiraAinda não há avaliações
- Live de Aquecimento 001 - Imersão Projeto No RevitDocumento7 páginasLive de Aquecimento 001 - Imersão Projeto No RevitLizbeth NinaAinda não há avaliações
- Tipos de Topologia PDFDocumento5 páginasTipos de Topologia PDFLeonardo DinisAinda não há avaliações
- Deliberacao 8 Aprova A Norma de Uso de Recursos e Servicos de TIDocumento12 páginasDeliberacao 8 Aprova A Norma de Uso de Recursos e Servicos de TIcarolbnicolau222Ainda não há avaliações
- IntroCyberv2.1 Chp2 Instructor Supplemental MaterialDocumento18 páginasIntroCyberv2.1 Chp2 Instructor Supplemental MaterialRaysa BatistaAinda não há avaliações
- 15 Exercicios Robotica - USFDocumento2 páginas15 Exercicios Robotica - USFJoao Alex100% (1)
- Instalacao Certificado Filtro Seed AndroidDocumento10 páginasInstalacao Certificado Filtro Seed AndroidLucas SandeskiAinda não há avaliações
- Diagramas de Classes-1Documento44 páginasDiagramas de Classes-1paulo sergioAinda não há avaliações
- Apostila - Módulo 1 - Bootcamp Analista de Ataque CibernéticoDocumento44 páginasApostila - Módulo 1 - Bootcamp Analista de Ataque Cibernéticoleomoura20Ainda não há avaliações
- Plano de Teste Zexel 104741-5323Documento2 páginasPlano de Teste Zexel 104741-5323Junior IungAinda não há avaliações
- 10 Passos Par Um Amor de VerdadeDocumento67 páginas10 Passos Par Um Amor de Verdadeservicos especiaisAinda não há avaliações
- Estimativa de SoftwareDocumento12 páginasEstimativa de SoftwareCarlos QueirosAinda não há avaliações
- Raciocínio lógico e matemática para concursos: Manual completoNo EverandRaciocínio lógico e matemática para concursos: Manual completoNota: 5 de 5 estrelas5/5 (1)
- Estratégias E Macetes Matemáticos Para ConcurseirosNo EverandEstratégias E Macetes Matemáticos Para ConcurseirosAinda não há avaliações
- Matemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalNo EverandMatemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalAinda não há avaliações
- Como passar concursos CEBRASPE -Raciocínio Lógico, Matemática e InformáticaNo EverandComo passar concursos CEBRASPE -Raciocínio Lógico, Matemática e InformáticaAinda não há avaliações
- Numerologia: Autoconhecimento através dos númerosNo EverandNumerologia: Autoconhecimento através dos númerosNota: 5 de 5 estrelas5/5 (4)
- A matemática nos anos iniciais do ensino fundamental: Tecendo fios do ensinar e do aprenderNo EverandA matemática nos anos iniciais do ensino fundamental: Tecendo fios do ensinar e do aprenderNota: 4.5 de 5 estrelas4.5/5 (5)