Você também pode gostar
- Analise de Sistemas Com CapaDocumento107 páginasAnalise de Sistemas Com CapaNicolas Siqueira da SilvaAinda não há avaliações
- Engenharia de Software - Qualidade de SoftwareDocumento39 páginasEngenharia de Software - Qualidade de SoftwareEdson AraujoAinda não há avaliações
- PROJ.05-2023.1 - Implantação ERP Contabil e Financeiro (Totvs)Documento4 páginasPROJ.05-2023.1 - Implantação ERP Contabil e Financeiro (Totvs)Tiago leite da silvaAinda não há avaliações
- Manual Ferramentas 08 - 2013Documento299 páginasManual Ferramentas 08 - 2013edersonlusmar100% (1)
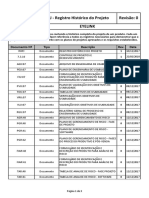
- 03 - Indice Registro Historico Do Projeto - EyelinkDocumento3 páginas03 - Indice Registro Historico Do Projeto - EyelinkUbirajarahelt100% (1)
- Catálogo Awaltek ELevadoresDocumento133 páginasCatálogo Awaltek ELevadoresGelson Simões100% (2)
- Ecologia LauraDocumento13 páginasEcologia LauraLaura SouzaAinda não há avaliações
- Controladores Guardlogix 5570: Manual Do UsuárioDocumento148 páginasControladores Guardlogix 5570: Manual Do UsuárioSidnei AguiarAinda não há avaliações
- 2 Aula Redes-IndustriaisDocumento7 páginas2 Aula Redes-IndustriaisIolanda PretaZudaAinda não há avaliações
- Bezerra JoseHenrique M PDFDocumento86 páginasBezerra JoseHenrique M PDFAllison AmaranteAinda não há avaliações
- Correntes Nominais Dos Motores TrifásicosDocumento1 páginaCorrentes Nominais Dos Motores TrifásicosHenrique KotherAinda não há avaliações
- Lista 2 V2014Documento8 páginasLista 2 V2014rogerio nascimentoAinda não há avaliações
- Curso Gratuito Online NR 35 BasicoDocumento2 páginasCurso Gratuito Online NR 35 Basicorogerio nascimentoAinda não há avaliações
- Instrumentao Corrigido PDFDocumento221 páginasInstrumentao Corrigido PDFAndreza CardosoAinda não há avaliações
- AterramentoDocumento27 páginasAterramentoJonis SantosAinda não há avaliações
- Questionario Ead 3Documento7 páginasQuestionario Ead 3Isabela de SouzaAinda não há avaliações
- Sistema de Controle Da Qualidade - AV2Documento4 páginasSistema de Controle Da Qualidade - AV2Morgana CastilhoAinda não há avaliações
- Fundamentos de Software e Gerenciamento de ProjetosDocumento67 páginasFundamentos de Software e Gerenciamento de ProjetosElza MonteiroAinda não há avaliações
- Cronoanálise e o Lean ManufacturingDocumento2 páginasCronoanálise e o Lean ManufacturingDouglas MouraAinda não há avaliações
- Aula12 TgaDocumento28 páginasAula12 TgaVivy Tiago AssaneAinda não há avaliações
- Calibrador TelescópicoDocumento8 páginasCalibrador TelescópicoMauro Miguel100% (1)
- Planilha de Benchmark e Planejamento de VendasDocumento73 páginasPlanilha de Benchmark e Planejamento de VendasPractice ConsultoriaAinda não há avaliações
- Modelo de ApostilaDocumento12 páginasModelo de ApostilaAlessandro Carvalho SantosAinda não há avaliações
- .02 - Designação de Interlocutores para o Relacionamento Operacional Entre ONS e AgentesDocumento14 páginas.02 - Designação de Interlocutores para o Relacionamento Operacional Entre ONS e AgentesRotieri FontanariAinda não há avaliações
- 100 Questões Produção e ComprasDocumento36 páginas100 Questões Produção e Comprasalexandre sales guerraAinda não há avaliações
- Cópia de MAPA MENTAL GESTAO DE PESSOAS AJUSTE LUCIANODocumento1 páginaCópia de MAPA MENTAL GESTAO DE PESSOAS AJUSTE LUCIANOSayonara Pereira de OliveiraAinda não há avaliações
- Simulado Engenharia de Software 3Documento1 páginaSimulado Engenharia de Software 3MarlonAinda não há avaliações
- Ques - Ara0097 - Eng - Software - ExerciciosDocumento4 páginasQues - Ara0097 - Eng - Software - ExerciciosCaio Guilherme AraujoAinda não há avaliações
- Vantagens e Desvantagens de Sistemas de Gestão EmpresárialDocumento13 páginasVantagens e Desvantagens de Sistemas de Gestão Empresárialwanderson cintraAinda não há avaliações