Você também pode gostar
- Ensino de Ciências Fundamentos e Métodos 1Documento70 páginasEnsino de Ciências Fundamentos e Métodos 1Ivone Santiago93% (29)
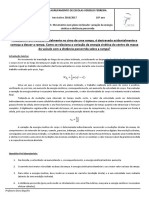
- Física - AL 1.1 - Movimento Num Plano Inclinado Variação Da Energia Cinética e Distância PercorridaDocumento6 páginasFísica - AL 1.1 - Movimento Num Plano Inclinado Variação Da Energia Cinética e Distância PercorridaM Fátima Custódio67% (18)
- Desenvolvimento Das Ideias Pedagógicas Leigas:Ecletismo, Liberalismo e Positivismo (1827-1932)Documento40 páginasDesenvolvimento Das Ideias Pedagógicas Leigas:Ecletismo, Liberalismo e Positivismo (1827-1932)Luana MachadoAinda não há avaliações
- Catálogo CM4040 - V10 - 2022Documento4 páginasCatálogo CM4040 - V10 - 2022arthurvalinhoAinda não há avaliações
- ArtigoFIEMA 2014Documento9 páginasArtigoFIEMA 2014arthurvalinhoAinda não há avaliações
- Varlogic NR - 52448Documento2 páginasVarlogic NR - 52448arthurvalinhoAinda não há avaliações
- TR 14609248 1046965892 20190201 PTDocumento8 páginasTR 14609248 1046965892 20190201 PTarthurvalinhoAinda não há avaliações
- ITMRT200Documento2 páginasITMRT200arthurvalinhoAinda não há avaliações
- Artigo RTDocumento13 páginasArtigo RTarthurvalinhoAinda não há avaliações
- EM4058Documento2 páginasEM4058arthurvalinhoAinda não há avaliações
- Dissertação Jaison Ricardo CoelhoDocumento59 páginasDissertação Jaison Ricardo CoelhoarthurvalinhoAinda não há avaliações
- Ajuste - SeletividadeDocumento8 páginasAjuste - SeletividadearthurvalinhoAinda não há avaliações
- Laudo Resist Solo Chemtrade Es Rev1 2021Documento6 páginasLaudo Resist Solo Chemtrade Es Rev1 2021arthurvalinhoAinda não há avaliações
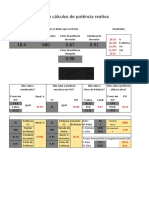
- Calculo ReativaDocumento1 páginaCalculo ReativaarthurvalinhoAinda não há avaliações
- Capítulo+7+-+SPDADocumento61 páginasCapítulo+7+-+SPDAarthurvalinhoAinda não há avaliações
- Folha de Testes Transformador CINE ARAUJODocumento1 páginaFolha de Testes Transformador CINE ARAUJOarthurvalinhoAinda não há avaliações
- Folha de Testes Transformador MIZUDocumento1 páginaFolha de Testes Transformador MIZUarthurvalinhoAinda não há avaliações
- Exercícios+dimensionamento+de+disjuntorDocumento2 páginasExercícios+dimensionamento+de+disjuntorarthurvalinhoAinda não há avaliações
- E2 EmpuxoDocumento4 páginasE2 EmpuxoJanama AlvesAinda não há avaliações
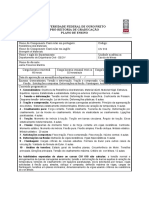
- Plano de Ensino CIV 610Documento3 páginasPlano de Ensino CIV 610Ana LuízaAinda não há avaliações
- Moyses v2c09 PDFDocumento13 páginasMoyses v2c09 PDFDavi ArthurAinda não há avaliações
- Considerações Sobre o Conceito de Marketing Teoria e Prática GerencialDocumento25 páginasConsiderações Sobre o Conceito de Marketing Teoria e Prática GerencialDarlene PereiraAinda não há avaliações
- Halliday 3Documento177 páginasHalliday 3David QuinelatoAinda não há avaliações
- Lista 1 MSF 2015Documento6 páginasLista 1 MSF 2015Marcus RodriguesAinda não há avaliações
- O Proporcional e o Razoavel - Virgilio Afonso Da SilvaDocumento288 páginasO Proporcional e o Razoavel - Virgilio Afonso Da SilvaElias ChalubAinda não há avaliações
- PME3210 P1 2017 - ResoluçãoDocumento4 páginasPME3210 P1 2017 - ResoluçãomarcioAinda não há avaliações
- 4º Simulado de Física - ENEM - Corrigido e ComentadoDocumento12 páginas4º Simulado de Física - ENEM - Corrigido e ComentadoRafael PinheiroAinda não há avaliações
- Fasciculo 11a - II TE PDFDocumento19 páginasFasciculo 11a - II TE PDFMorais Gomes JustinAinda não há avaliações
- O Meio Físico Na Recuperação de Áreas DegradadasDocumento16 páginasO Meio Físico Na Recuperação de Áreas DegradadasClaudio SantanaAinda não há avaliações
- Extraterrestres PDFDocumento11 páginasExtraterrestres PDFMarcelo Aparecido Dos SantosAinda não há avaliações
- Marxismo e GeografiaDocumento17 páginasMarxismo e GeografiaLuiz Felipe BarrosAinda não há avaliações
- Apostila 3º Bim 1º Serie 2021Documento307 páginasApostila 3º Bim 1º Serie 2021Mateus Pereira DinizAinda não há avaliações
- ND40rev05 07 - 2014Documento51 páginasND40rev05 07 - 2014Taís Zamunér CalociniAinda não há avaliações
- Contributo Das Experiencias Imaginadas de Galileu No Desenvolvimento CientificoDocumento11 páginasContributo Das Experiencias Imaginadas de Galileu No Desenvolvimento CientificoAilton BarretoAinda não há avaliações
- Atividade PhET - DinâmicaDocumento78 páginasAtividade PhET - DinâmicaCharles MeloAinda não há avaliações
- Mecânica Dos Sólidos - Gab - LahDocumento5 páginasMecânica Dos Sólidos - Gab - LahRicardo VeríssimoAinda não há avaliações
- Roteiro Da Prática de FluidizaçãoDocumento6 páginasRoteiro Da Prática de FluidizaçãoDriNay13Ainda não há avaliações
- Apostilas Do Curso - Mecânica Dos SolosDocumento52 páginasApostilas Do Curso - Mecânica Dos SolosCLEIDEEAinda não há avaliações
- Teorias Da Vida e Teorias Do UniversoDocumento11 páginasTeorias Da Vida e Teorias Do UniversoEduarda Nascimento de Souza100% (1)
- APOSTILA REVISÃO TESTE - 3unidadeDocumento6 páginasAPOSTILA REVISÃO TESTE - 3unidadeJoão HenriqueAinda não há avaliações
- Trabalho Sobre CapacitoresDocumento28 páginasTrabalho Sobre CapacitoresTango TangoAinda não há avaliações
- Físico-Química Nome: - # - Turma: - Data: - E. EducaçãoDocumento3 páginasFísico-Química Nome: - # - Turma: - Data: - E. EducaçãoAngelaCravo0% (1)
- Tabela Asus Aquecedor Solar - Outubro 2017Documento2 páginasTabela Asus Aquecedor Solar - Outubro 2017Fábio MarcheziniAinda não há avaliações
- Artigos Da Técnica de AlexanderDocumento8 páginasArtigos Da Técnica de AlexanderdaniloAinda não há avaliações
- Longevidade e Boa SaudeDocumento134 páginasLongevidade e Boa Saudefabiocaleiros100% (2)