Você também pode gostar
- Montando um braço robótico com ArduinoDocumento28 páginasMontando um braço robótico com ArduinocristianeAinda não há avaliações
- Projetos Com Esp32 Programado Em Arduino - Parte XxixNo EverandProjetos Com Esp32 Programado Em Arduino - Parte XxixAinda não há avaliações
- Conectando O Multiplexador Cd4051 Programado No ArduinoNo EverandConectando O Multiplexador Cd4051 Programado No ArduinoAinda não há avaliações
- Experiências Com O Eletroímã Programado No ArduinoNo EverandExperiências Com O Eletroímã Programado No ArduinoAinda não há avaliações
- Conectando O Shift Register 74hc595 Programado No ArduinoNo EverandConectando O Shift Register 74hc595 Programado No ArduinoAinda não há avaliações
- Conectando O Módulo Fm Si4703 Programado No ArduinoNo EverandConectando O Módulo Fm Si4703 Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De Benzeno Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De Benzeno Programado No ArduinoAinda não há avaliações
- Lendo A Radiação Uv Com O Sensor Ml8511 Programado No ArduinoNo EverandLendo A Radiação Uv Com O Sensor Ml8511 Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De Amônia Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De Amônia Programado No ArduinoAinda não há avaliações
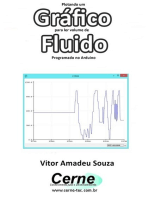
- Plotando Um Gráfico Para Ler Volume De Fluido Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Volume De Fluido Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Amônia No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Amônia No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Conectando O Sensor De Turbidez Programado No ArduinoNo EverandConectando O Sensor De Turbidez Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Benzeno No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Benzeno No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Desenvolvendo Um Display Serial Com O Esp32 Programado No ArduinoNo EverandDesenvolvendo Um Display Serial Com O Esp32 Programado No ArduinoAinda não há avaliações
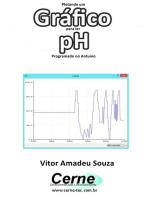
- Plotando Um Gráfico Para Ler Ph Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Ph Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Barômetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Barômetro Programado No ArduinoAinda não há avaliações
- Programando O Arduino Com A Função Do Circuito Integrado 74139No EverandProgramando O Arduino Com A Função Do Circuito Integrado 74139Ainda não há avaliações
- Implementando Um Contador Com Sensor De Proximidade Capacitivo Modelo Ljc18a3-h-z/bx Programado No ArduinoNo EverandImplementando Um Contador Com Sensor De Proximidade Capacitivo Modelo Ljc18a3-h-z/bx Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De Ozônio Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De Ozônio Programado No ArduinoAinda não há avaliações
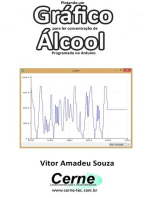
- Plotando Um Gráfico Para Ler Concentração De Álcool Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De Álcool Programado No ArduinoAinda não há avaliações
- Programando O Arduino Com A Função Do Circuito Integrado 4017No EverandProgramando O Arduino Com A Função Do Circuito Integrado 4017Ainda não há avaliações
- Conectando O Sensor De Temperatura Ina3221 Programado No ArduinoNo EverandConectando O Sensor De Temperatura Ina3221 Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Co No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Co No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Fluido No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Fluido No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
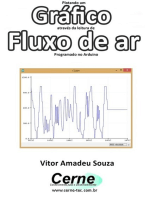
- Plotando Um Gráfico Através Da Leitura De Fluxo De Ar Programado No ArduinoNo EverandPlotando Um Gráfico Através Da Leitura De Fluxo De Ar Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Amperímetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Amperímetro Programado No ArduinoAinda não há avaliações
- Desenvolvendo Uma Aplicação Cliente Servidor Com O Esp32 Programado No ArduinoNo EverandDesenvolvendo Uma Aplicação Cliente Servidor Com O Esp32 Programado No ArduinoAinda não há avaliações
- Conectando O Conversor Adc Ad7705 Programado No ArduinoNo EverandConectando O Conversor Adc Ad7705 Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Ozônio No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Ozônio No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Álcool No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Álcool No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Gaussímetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Gaussímetro Programado No ArduinoAinda não há avaliações
- Monitorando Através Do Visual C# O Dinamômetro Com O Stm32f103c8 Programado No ArduinoNo EverandMonitorando Através Do Visual C# O Dinamômetro Com O Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Monitorando Amperímetro No Arduino Com Sintetizador De Voz Programado No PythonNo EverandMonitorando Amperímetro No Arduino Com Sintetizador De Voz Programado No PythonAinda não há avaliações
- Conectando O Leitor De Rfid Rdm6300 Programado No ArduinoNo EverandConectando O Leitor De Rfid Rdm6300 Programado No ArduinoAinda não há avaliações
- Conectando Um Display De 7 Segmentos Usando O 4511 Programado No ArduinoNo EverandConectando Um Display De 7 Segmentos Usando O 4511 Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Uv Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Uv Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Célula De Carga Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Célula De Carga Programado No ArduinoAinda não há avaliações
- Monitorando Através Do Visual Basic O Dinamômetro Com O Stm32f103c8 Programado No ArduinoNo EverandMonitorando Através Do Visual Basic O Dinamômetro Com O Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Monitorando Através Do Visual C# O Amperímetro Com O Stm32f103c8 Programado No ArduinoNo EverandMonitorando Através Do Visual C# O Amperímetro Com O Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Monitorando Através Do Visual Basic O Amperímetro Com O Stm32f103c8 Programado No ArduinoNo EverandMonitorando Através Do Visual Basic O Amperímetro Com O Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Conectando O Sensor De Temperatura Lm35 Programado No ArduinoNo EverandConectando O Sensor De Temperatura Lm35 Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Voltímetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Voltímetro Programado No ArduinoAinda não há avaliações
- Conectando O Driver Tb6612fng Programado No ArduinoNo EverandConectando O Driver Tb6612fng Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De Co Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De Co Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Dinamômetro No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Dinamômetro No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Voltímetro No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Voltímetro No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Lendo O Sensor Óptico Modelo Ky-010 Programado No ArduinoNo EverandLendo O Sensor Óptico Modelo Ky-010 Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Barômetro No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Barômetro No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Conectando O Driver Bts7960 Programado No ArduinoNo EverandConectando O Driver Bts7960 Programado No ArduinoAinda não há avaliações
- Lendo Temperatura E Umidade Com O Sensor Am2301 Programado No ArduinoNo EverandLendo Temperatura E Umidade Com O Sensor Am2301 Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Termômetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Termômetro Programado No ArduinoAinda não há avaliações
- Lendo Um Sensor De Temperatura Modelo Tmp036 Programado No ArduinoNo EverandLendo Um Sensor De Temperatura Modelo Tmp036 Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Uv No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Uv No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De H2 Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De H2 Programado No ArduinoAinda não há avaliações
- Manual de Trei 2010 - Parte II 024123Documento57 páginasManual de Trei 2010 - Parte II 024123MarcosAinda não há avaliações
- Siemens Apostila PLC Siemens Tia Portal PDF FreeDocumento26 páginasSiemens Apostila PLC Siemens Tia Portal PDF FreeGuilhermeMacedoAinda não há avaliações
- Manual de Fundamentos de Programação em JavaDocumento126 páginasManual de Fundamentos de Programação em JavaJúlioAinda não há avaliações
- BP7848 C8HM70-I SeriesDocumento62 páginasBP7848 C8HM70-I SeriesWilson Batista de Oliveira JuniorAinda não há avaliações
- Catalogo Samsung C4062FXDocumento2 páginasCatalogo Samsung C4062FXamokssantiagoAinda não há avaliações
- Guia ConfirmacaodeHomologacao CAD 20210114 RevDocumento58 páginasGuia ConfirmacaodeHomologacao CAD 20210114 RevRosemir MoreiraAinda não há avaliações
- Atos2Pc DLLDocumento11 páginasAtos2Pc DLLAutômattos SistemasAinda não há avaliações
- Layout Tema IntegraDocumento30 páginasLayout Tema IntegraLucas GuilhermeAinda não há avaliações
- VuejsDocumento42 páginasVuejsMárcio HenriqueAinda não há avaliações
- Excel Exemplo ExercicioDocumento36 páginasExcel Exemplo ExercicioDelma de OliveiraAinda não há avaliações
- Sistema de monitoramento de focos de dengueDocumento16 páginasSistema de monitoramento de focos de dengueFernando TenorioAinda não há avaliações
- Guia de uso completo do sistema GymStyle WebDocumento45 páginasGuia de uso completo do sistema GymStyle WebTiago FerreiraAinda não há avaliações
- Introdução Aos Diferentes Tipos de TesteDocumento19 páginasIntrodução Aos Diferentes Tipos de TesterafaelAinda não há avaliações
- UPSentry2012 EN - En.ptDocumento55 páginasUPSentry2012 EN - En.ptAR&MENDES ENGENHARIAAinda não há avaliações
- Manual de Operação Ver 1.0Documento15 páginasManual de Operação Ver 1.0Eng. Getulio NogueiraAinda não há avaliações
- Livro 01 - Primeiro Esboço Com o KritaDocumento25 páginasLivro 01 - Primeiro Esboço Com o KritaMarco Antonio Maciel PereiraAinda não há avaliações
- 2 Anotações Da Aula 0Documento12 páginas2 Anotações Da Aula 0GugaAinda não há avaliações
- Definições de Computador, Programa e LinguagensDocumento33 páginasDefinições de Computador, Programa e LinguagensChico OliveiraAinda não há avaliações
- Manual Do Utilizador PT LNV M14LC1 - 256 FinalDocumento45 páginasManual Do Utilizador PT LNV M14LC1 - 256 FinalATP PedroAinda não há avaliações
- Microsoft Word 2013 Passo A Passo (Bonatti, Denilson)Documento287 páginasMicrosoft Word 2013 Passo A Passo (Bonatti, Denilson)Instalação Industrial100% (1)
- Arquitetura de MicroserviçosDocumento30 páginasArquitetura de MicroserviçosÉbrio Banda (Ébrio Death)Ainda não há avaliações
- Metas de um Sistema Distribuído: Acesso, Transparência, Abertura e EscalabilidadeDocumento24 páginasMetas de um Sistema Distribuído: Acesso, Transparência, Abertura e EscalabilidadeVictor RoberthAinda não há avaliações
- Inkscape TutorialDocumento58 páginasInkscape TutorialMarilza VianaAinda não há avaliações
- Edição de textos, planilhas e apresentações no Word e LibreOfficeDocumento40 páginasEdição de textos, planilhas e apresentações no Word e LibreOfficeuryansaviottiAinda não há avaliações
- Sistemas Operacionais - Conceito PDFDocumento26 páginasSistemas Operacionais - Conceito PDFLeander SouzaAinda não há avaliações
- JFo 9 2 SG PRDocumento30 páginasJFo 9 2 SG PRrobinho de angelisAinda não há avaliações
- Descubra Funções Ocultas Do Teclado Do Seu NotebookDocumento3 páginasDescubra Funções Ocultas Do Teclado Do Seu NotebookEdson SantosAinda não há avaliações
- Sistemas Operacionais Questões ResolvidasDocumento39 páginasSistemas Operacionais Questões ResolvidasDavi OliveiraAinda não há avaliações
- Guia completo sobre o OpenStackDocumento41 páginasGuia completo sobre o OpenStackJudson BorgesAinda não há avaliações
- Threads en PTDocumento27 páginasThreads en PTEdson FranciscoAinda não há avaliações