Você também pode gostar
- Ebook 40 Projetos Com ArduinoDocumento195 páginasEbook 40 Projetos Com ArduinoCiros Kauer100% (9)
- Relatório 01Documento18 páginasRelatório 01Ian SantosAinda não há avaliações
- Apostila Arduno Avancado Bau Da EletronicaDocumento160 páginasApostila Arduno Avancado Bau Da EletronicaMarcelo Aliberti100% (4)
- GM17 Traduzida PDFDocumento15 páginasGM17 Traduzida PDFJéssica FerreiraAinda não há avaliações
- Dimensionamento de Cabos e Proteções em Sistemas FotovoltaicosDocumento32 páginasDimensionamento de Cabos e Proteções em Sistemas FotovoltaicosDAVID ALEX DE OLIVEIRA SOUSAAinda não há avaliações
- Manual Kit Iniciante - Rev.3Documento134 páginasManual Kit Iniciante - Rev.3Felipe Costa100% (1)
- 7 Pratica Maxima Transferencia de PotenciaDocumento3 páginas7 Pratica Maxima Transferencia de PotenciaWilliam Fernando OliveiraAinda não há avaliações
- Apostila ArduinoDocumento26 páginasApostila ArduinoPaulo Marcelo Pontes100% (9)
- ArduinoDocumento21 páginasArduinoFranciscoRicardo100% (1)
- O Arduino Descomplicado e Divertido - Volume 1Documento64 páginasO Arduino Descomplicado e Divertido - Volume 1Jhonathan Rodrigo Oliveira FróesAinda não há avaliações
- Manual Arduino PequenoDocumento13 páginasManual Arduino PequenoPedro Ramos100% (1)
- Curso Arduino Shakib 2013Documento100 páginasCurso Arduino Shakib 2013Joana Nogueira100% (3)
- Projetos e DesafiosDocumento44 páginasProjetos e DesafiosSérgio Lima100% (3)
- Livro Sobre ArduinoDocumento215 páginasLivro Sobre ArduinoIsrael Vieira100% (4)
- Curso Básico de ArduinoDocumento244 páginasCurso Básico de ArduinoJakson67% (3)
- Primeiros Passos Com o Raspberry Pi PDFDocumento22 páginasPrimeiros Passos Com o Raspberry Pi PDFTiagoMF18267% (3)
- 10-Projetos de ArduinoDocumento45 páginas10-Projetos de ArduinoEliel Souza100% (3)
- Introducao A Computacao Fisica Com ArduinoDocumento50 páginasIntroducao A Computacao Fisica Com ArduinoThalis Antunes100% (3)
- Arduino e AndroidDocumento15 páginasArduino e AndroidTiago FeitosaAinda não há avaliações
- ARDUINO - Cartilha para Programação em CDocumento23 páginasARDUINO - Cartilha para Programação em CJoão Alexandre Silveira100% (3)
- Arduino - Simulação em Virtual BreadboardDocumento9 páginasArduino - Simulação em Virtual BreadboardAntónio Henriques100% (1)
- Arduino Omega Ebook Robotica IniciantesDocumento99 páginasArduino Omega Ebook Robotica IniciantesOderaldo CastelaniAinda não há avaliações
- 03 ArduinocompletoDocumento93 páginas03 ArduinocompletoRodrigo Adilio Franco100% (1)
- O Guia Definitivo para Aprender Arduino Na Pratica 1Documento58 páginasO Guia Definitivo para Aprender Arduino Na Pratica 1Pedro Miguel100% (4)
- Apostila Eletrogate - Kit Arduino Basic PDFDocumento44 páginasApostila Eletrogate - Kit Arduino Basic PDFviniciusAinda não há avaliações
- Ebook ArduinoDocumento83 páginasEbook ArduinoFernando Antonio100% (1)
- Exercicios ArduinoDocumento15 páginasExercicios ArduinoMargarida Paixão100% (2)
- Arduino 101Documento123 páginasArduino 101christian souzaAinda não há avaliações
- Guia Rapido Programacao ArduinoDocumento27 páginasGuia Rapido Programacao ArduinoArthur Eduardo Mari0% (1)
- 1610388034apostila Eletrogate - Kit Arduino BeginningDocumento54 páginas1610388034apostila Eletrogate - Kit Arduino BeginningDavidAinda não há avaliações
- Apostila Arduino Vol 2Documento65 páginasApostila Arduino Vol 2Williams Silva67% (3)
- Introdução Ao Arduino - Get Starter Com ArduinoDocumento103 páginasIntrodução Ao Arduino - Get Starter Com ArduinoCirineu Fernandes100% (4)
- Primeiros Passos Com Arduino-V0RV1Documento43 páginasPrimeiros Passos Com Arduino-V0RV1vitor4santos_6Ainda não há avaliações
- Curso PCB - Felipe SchneiderDocumento43 páginasCurso PCB - Felipe SchneiderFelipe Schneider100% (1)
- Tutorial ArduinoDocumento69 páginasTutorial ArduinoMatheus OliveiraAinda não há avaliações
- Aprendendo A Programar em ArduinoDocumento49 páginasAprendendo A Programar em ArduinoLeandro Teixeira100% (2)
- Desenvolvendo Um Datalogger Para Um Hidrômetro Com ArduinoNo EverandDesenvolvendo Um Datalogger Para Um Hidrômetro Com ArduinoAinda não há avaliações
- Apostila De ArduínoNo EverandApostila De ArduínoNota: 4 de 5 estrelas4/5 (1)
- Brincadeiras e Experiências com Eletrônica - volume 9No EverandBrincadeiras e Experiências com Eletrônica - volume 9Ainda não há avaliações
- Curso Linguagem C Para Microcontroladores PicNo EverandCurso Linguagem C Para Microcontroladores PicNota: 3 de 5 estrelas3/5 (2)
- Informando O Consumo De Energia Por Rs232 Via Protocolo Pima Programado No ArduinoNo EverandInformando O Consumo De Energia Por Rs232 Via Protocolo Pima Programado No ArduinoAinda não há avaliações
- Conectando O Sensor De Temperaturam E Umidade Htu31d Programado No ArduinoNo EverandConectando O Sensor De Temperaturam E Umidade Htu31d Programado No ArduinoAinda não há avaliações
- Projetos De Eletrônica De Potência Usando O ArduinoNo EverandProjetos De Eletrônica De Potência Usando O ArduinoAinda não há avaliações
- Controle De Acesso Com Esp8266 E Android Via Wifi Com Nodemcu Programado No Arduino E App InventorNo EverandControle De Acesso Com Esp8266 E Android Via Wifi Com Nodemcu Programado No Arduino E App InventorAinda não há avaliações
- Projetos Educacionais em Matriz de Contatos - Matriz de 170 pontosNo EverandProjetos Educacionais em Matriz de Contatos - Matriz de 170 pontosNota: 5 de 5 estrelas5/5 (1)
- Brincadeiras e experiências com eletrônica - Volume 2No EverandBrincadeiras e experiências com eletrônica - Volume 2Ainda não há avaliações
- O Fantástico Mundo Do ArduinoNo EverandO Fantástico Mundo Do ArduinoNota: 5 de 5 estrelas5/5 (1)
- Desenvolvendo Um Medidor De Vazão Modbus Rs485 No ArduinoNo EverandDesenvolvendo Um Medidor De Vazão Modbus Rs485 No ArduinoAinda não há avaliações
- Brincadeiras e Experiências com Eletrônica – Volume 3No EverandBrincadeiras e Experiências com Eletrônica – Volume 3Ainda não há avaliações
- Lista de Exercícios - Resistência e ResistividadeDocumento4 páginasLista de Exercícios - Resistência e ResistividadeFernando Gaiotto0% (1)
- 15 Mid144Documento19 páginas15 Mid144hld100% (3)
- EbookbateriasdelitioDocumento220 páginasEbookbateriasdelitioRodrigo Teixeira67% (3)
- Apostila Arduino Basico V1.0 EletrogateDocumento44 páginasApostila Arduino Basico V1.0 EletrogateGleison Aparecido OnofreAinda não há avaliações
- Relatorio Experimento 3Documento5 páginasRelatorio Experimento 3Rhômulo MaiaAinda não há avaliações
- NBR 5356 - 2007 - Transformadores de Potência - Parte 2 - Aq PDFDocumento27 páginasNBR 5356 - 2007 - Transformadores de Potência - Parte 2 - Aq PDFfabianohyaAinda não há avaliações
- Diodos e Circuitos CeifadoresDocumento8 páginasDiodos e Circuitos CeifadoresGliciel RodrigoAinda não há avaliações
- Prática 6 - Potencia e Maxima Transferencia de PotenciaDocumento5 páginasPrática 6 - Potencia e Maxima Transferencia de PotenciaJulia DiasAinda não há avaliações
- Relatório 2 Thevenin e NortonDocumento17 páginasRelatório 2 Thevenin e NortonFelipe Bizio100% (1)
- Circuitos ConcentradosDocumento11 páginasCircuitos ConcentradosPedro Francis CassalaAinda não há avaliações
- Exercíciosapostila 3Documento63 páginasExercíciosapostila 3forte2014Ainda não há avaliações
- Provão Enem de Física - Ii Unidade - 3º AnoDocumento3 páginasProvão Enem de Física - Ii Unidade - 3º AnopixkaraAinda não há avaliações
- Manual Multimetro MA 149 MinipaDocumento48 páginasManual Multimetro MA 149 MinipaAlessandro MaiaAinda não há avaliações
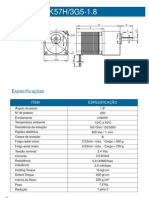
- AK57H/3G5-1.8: EspecificaçõesDocumento2 páginasAK57H/3G5-1.8: EspecificaçõesmozolnandoAinda não há avaliações
- Eletrotécnica PDFDocumento3 páginasEletrotécnica PDFAdson AraujoAinda não há avaliações
- Cabo-Aluminio-Liga-CAL-1120-Web - General CableDocumento3 páginasCabo-Aluminio-Liga-CAL-1120-Web - General CableLucyana RosaAinda não há avaliações
- Ficha Trabalho 2Documento1 páginaFicha Trabalho 2PedroAinda não há avaliações
- Listadeexercicios Fisica Associacao Resistores 25 08 2015 PDFDocumento3 páginasListadeexercicios Fisica Associacao Resistores 25 08 2015 PDFpedro NetoAinda não há avaliações
- Lista de Exercícios 1 - Eletricidade e Magnetismo - Prof. EvertonDocumento5 páginasLista de Exercícios 1 - Eletricidade e Magnetismo - Prof. EvertonHeitor RangelAinda não há avaliações
- Relatorio Forno Elétrico Eq. 1 (2334)Documento13 páginasRelatorio Forno Elétrico Eq. 1 (2334)Diego MelquiadesAinda não há avaliações
- 2013 UERJ FISICA DISCURSIVA 2005 A 2012 3a SERIEDocumento26 páginas2013 UERJ FISICA DISCURSIVA 2005 A 2012 3a SERIETalita Raquel Luz RomeroAinda não há avaliações
- Livro 6Documento16 páginasLivro 6RICARDOAinda não há avaliações
- Circuitos Elétricos. Leis de Kirchhoff PDFDocumento27 páginasCircuitos Elétricos. Leis de Kirchhoff PDFacsbaltazar4474Ainda não há avaliações
- Eletrodinamica 3mc3a9dioDocumento19 páginasEletrodinamica 3mc3a9dioCamilla VieiraAinda não há avaliações
- Exercícios Correntes ElétricasDocumento3 páginasExercícios Correntes ElétricasArtur MartinsAinda não há avaliações
- Afa-2020-Prova C PDFDocumento21 páginasAfa-2020-Prova C PDFDaniel de Rossi100% (1)