Você também pode gostar
- Exercicios Processos de Fundição R0.0Documento7 páginasExercicios Processos de Fundição R0.0Antonio MarinhoAinda não há avaliações
- 2014 Jan Pag.2Documento1 página2014 Jan Pag.2Antonio MarinhoAinda não há avaliações
- 2016 Jan Pag.1Documento1 página2016 Jan Pag.1Antonio MarinhoAinda não há avaliações
- 2011 Fev Pag.1Documento1 página2011 Fev Pag.1Antonio MarinhoAinda não há avaliações
- 2009 Jan Pag.1Documento1 página2009 Jan Pag.1Antonio MarinhoAinda não há avaliações
- 2016 Jan Pag.3Documento1 página2016 Jan Pag.3Antonio MarinhoAinda não há avaliações
- 2016 Dez Pag.2Documento1 página2016 Dez Pag.2Antonio MarinhoAinda não há avaliações
- 2014 Fev Pag.2Documento1 página2014 Fev Pag.2Antonio MarinhoAinda não há avaliações
- Energética Industrial: Engenharia MecânicaDocumento30 páginasEnergética Industrial: Engenharia MecânicaAntonio MarinhoAinda não há avaliações
- 2009 Jan Pag.3Documento1 página2009 Jan Pag.3Antonio MarinhoAinda não há avaliações
- SP20 - 05 - CAD - PR - P-S - Stirling 2DDocumento29 páginasSP20 - 05 - CAD - PR - P-S - Stirling 2DAntonio MarinhoAinda não há avaliações
- 2011 Fev Pag.2Documento1 página2011 Fev Pag.2Antonio MarinhoAinda não há avaliações
- SIDERURGIA Da Mat Prima Ao Lam 1 101Documento101 páginasSIDERURGIA Da Mat Prima Ao Lam 1 101Antonio MarinhoAinda não há avaliações
- SIDERURGIA Da Mat Prima Ao Lam 102 202Documento101 páginasSIDERURGIA Da Mat Prima Ao Lam 102 202Antonio MarinhoAinda não há avaliações
- VentilacaoDocumento2 páginasVentilacaoAntonio MarinhoAinda não há avaliações
- S1 - Introdução À Tecnologia Da SoldaduraDocumento16 páginasS1 - Introdução À Tecnologia Da SoldaduraAntonio MarinhoAinda não há avaliações
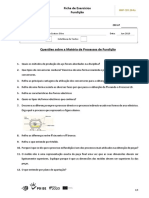
- Ficha de Exercícios FundiçãoDocumento8 páginasFicha de Exercícios FundiçãoAntonio Marinho100% (1)
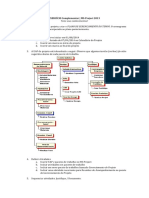
- Download-66054-Exercicio - MS-Project 2013 - Colete - Balistico-1526432Documento3 páginasDownload-66054-Exercicio - MS-Project 2013 - Colete - Balistico-1526432Antonio MarinhoAinda não há avaliações
- GP Modelos MatematicosDocumento10 páginasGP Modelos MatematicosAntonio MarinhoAinda não há avaliações