Você também pode gostar
- Programação Paralela e Distribuída: com MPI, OpenMP e OpenACC para computação de alto desempenhoNo EverandProgramação Paralela e Distribuída: com MPI, OpenMP e OpenACC para computação de alto desempenhoAinda não há avaliações
- FjwjdjejDocumento36 páginasFjwjdjejsamuel souzaAinda não há avaliações
- Arquitetura Superecalar e ParalelaDocumento10 páginasArquitetura Superecalar e ParalelaOssman RaufAinda não há avaliações
- Lista de Exercicios IIDocumento2 páginasLista de Exercicios IIdouglas_cptAinda não há avaliações
- Sist Comp Modernos-Tema 5 - AvaDocumento16 páginasSist Comp Modernos-Tema 5 - AvaGabriel MachadoAinda não há avaliações
- 5 - Processamento em ParaleloDocumento41 páginas5 - Processamento em ParaleloJefferson PolettoAinda não há avaliações
- Lista de Exercicios 1 e 2Documento4 páginasLista de Exercicios 1 e 2Mauricio Soneka100% (3)
- Artigo Arquitetura PowerPCDocumento4 páginasArtigo Arquitetura PowerPCJonas MayerAinda não há avaliações
- ParaleloxDistribuido, Pipeline, ThradsDocumento38 páginasParaleloxDistribuido, Pipeline, Thradslinux_peAinda não há avaliações
- Risc e CiscDocumento4 páginasRisc e CiscJanser Franca100% (1)
- Relatório FundamentosDocumento17 páginasRelatório FundamentosEllêm ClaudinoAinda não há avaliações
- Unidade Central de ProcessamentoDocumento13 páginasUnidade Central de ProcessamentoGabriel LopesAinda não há avaliações
- Sistem As Multi Comput AdoresDocumento5 páginasSistem As Multi Comput Adoresblomes.silvaAinda não há avaliações
- Processadores PDFDocumento2 páginasProcessadores PDFCPUCGAinda não há avaliações
- Questoes CISC e RISCDocumento3 páginasQuestoes CISC e RISCBruna SouzaAinda não há avaliações
- Arquitetura CISC e RISCDocumento27 páginasArquitetura CISC e RISCKeven PaivaAinda não há avaliações
- Questionário 10Documento5 páginasQuestionário 10Marcus RamosAinda não há avaliações
- (Artigo) - Paralelismo em Nivel de ThreadDocumento7 páginas(Artigo) - Paralelismo em Nivel de ThreadFernando SouzaAinda não há avaliações
- Microprocessadores Overclocking e HyperDocumento4 páginasMicroprocessadores Overclocking e HyperZé PedroAinda não há avaliações
- Arquitetura Cisc e Risc Qual DiferençaDocumento9 páginasArquitetura Cisc e Risc Qual DiferençaAnderson RaposoAinda não há avaliações
- Atividade Arquitetura MulticoreDocumento10 páginasAtividade Arquitetura MulticoreDenis MarcosAinda não há avaliações
- Arquitetura de Computadores - Aula 06Documento11 páginasArquitetura de Computadores - Aula 06neo-brAinda não há avaliações
- Slides Da Aula 6 - Arquitetura de ComputadoresDocumento43 páginasSlides Da Aula 6 - Arquitetura de ComputadoresMatheusAinda não há avaliações
- Gerência de Processos, IdentificandoDocumento26 páginasGerência de Processos, IdentificandoThiago AzevedoAinda não há avaliações
- Aula III - Arquitectura de Computador PDFDocumento24 páginasAula III - Arquitectura de Computador PDFInvestir VidaAinda não há avaliações
- Arquitetura de Computadores - Questionário 10Documento5 páginasArquitetura de Computadores - Questionário 10Marcus RamosAinda não há avaliações
- Arquitetura MulticoreDocumento9 páginasArquitetura MulticorecibeleAinda não há avaliações
- Lista de Exercicios II - Marcelo de OliveiraDocumento2 páginasLista de Exercicios II - Marcelo de OliveiraMarcelo de OliveraAinda não há avaliações
- RISC e CISCDocumento7 páginasRISC e CISCElton MironaAinda não há avaliações
- Projeto Integrado IDocumento11 páginasProjeto Integrado IDaniel Henrique100% (1)
- Unidade III - Organização e Arquitetura de Computadores PDFDocumento26 páginasUnidade III - Organização e Arquitetura de Computadores PDFLuiz Arthur SoutoAinda não há avaliações
- ARC Aula07 MultiCoreDocumento10 páginasARC Aula07 MultiCoreJoão Pedro EliasAinda não há avaliações
- Faculdade Pitágora1Documento8 páginasFaculdade Pitágora1Tawk StolenAinda não há avaliações
- Arquitetura de Sistemas Distribuídos - Estácio de SáDocumento14 páginasArquitetura de Sistemas Distribuídos - Estácio de SáLeonardo Batisti de FariaAinda não há avaliações
- Apostila Arquitetura Risc e Cisc. Noções BásicasDocumento4 páginasApostila Arquitetura Risc e Cisc. Noções BásicasAdr Silva0% (1)
- 1 Projeto Integrado - TiDocumento14 páginas1 Projeto Integrado - TiGhost flr12100% (1)
- Programação ParalelaDocumento70 páginasProgramação ParalelaGeronimo AmaralAinda não há avaliações
- Risc X CiscDocumento7 páginasRisc X CischeronmarroniAinda não há avaliações
- Trabalho Imprimir.mDocumento15 páginasTrabalho Imprimir.mLeandro VyctorAinda não há avaliações
- Lista de Exercicios Sistemas Operacionais ResolvidaDocumento25 páginasLista de Exercicios Sistemas Operacionais ResolvidaSusana BastosAinda não há avaliações
- Aoc2 Aula8.0 2pDocumento33 páginasAoc2 Aula8.0 2pAdilson TorresAinda não há avaliações
- Modelos de ProgramaçãoDocumento23 páginasModelos de ProgramaçãoRogério RochaAinda não há avaliações
- Cluster X GridDocumento30 páginasCluster X GridAndré Campos RodovalhoAinda não há avaliações
- Artigo 3Documento9 páginasArtigo 3zubukAinda não há avaliações
- ProcessadoresDocumento4 páginasProcessadoresVICTOR HUGO CANDIDO MALVAOAinda não há avaliações
- Arquitetura IntelDocumento8 páginasArquitetura IntelFredCompAinda não há avaliações
- Cap02 - Evolução e Desempenho Do ComputadorDocumento50 páginasCap02 - Evolução e Desempenho Do ComputadorKaroline TorresAinda não há avaliações
- Emmerson Silva, Maquina Risc X Cisc.Documento19 páginasEmmerson Silva, Maquina Risc X Cisc.Emerson SilvaAinda não há avaliações
- AlisonWinkert Tarefa01Documento4 páginasAlisonWinkert Tarefa01Thiago WesleyAinda não há avaliações
- 2021 - Capítulo 02Documento37 páginas2021 - Capítulo 02Eduardo Miguel Perotti OliveiraAinda não há avaliações
- Resumo de SODocumento5 páginasResumo de SOGuto LescuraAinda não há avaliações
- Apostila OpenmpDocumento59 páginasApostila OpenmpJoão Paulo TavaresAinda não há avaliações
- Computaçao Paralela 2Documento35 páginasComputaçao Paralela 2hians carolAinda não há avaliações
- Projeto e Implementação de Um Cluster Beowulf PDFDocumento4 páginasProjeto e Implementação de Um Cluster Beowulf PDFSaulo AraújoAinda não há avaliações
- HomossinéticaDocumento3 páginasHomossinéticaBruno SalgadoAinda não há avaliações
- Como Desmontar Uma CpuDocumento9 páginasComo Desmontar Uma CpuMarcos DiasAinda não há avaliações
- Check List Visual ManutençãoDocumento3 páginasCheck List Visual ManutençãoHelbert100% (6)
- FusíveisDocumento15 páginasFusíveismarcelogaloucura8Ainda não há avaliações
- D5 - MANUAL - 0749 - Arquitectura de ComputadoresDocumento29 páginasD5 - MANUAL - 0749 - Arquitectura de ComputadoresTécnicasAinda não há avaliações
- Testes Eletronicos de Fusiveis Playstation 2Documento3 páginasTestes Eletronicos de Fusiveis Playstation 2Juliano PrecivalliAinda não há avaliações
- VW 24 250 TruckDocumento2 páginasVW 24 250 TruckMarcelo Monteiro Da Correggio100% (1)
- Sist IgniçãoDocumento9 páginasSist IgniçãoMarcosAinda não há avaliações
- Manual - Do - Usuário - Corp 8000 - Português-1Documento111 páginasManual - Do - Usuário - Corp 8000 - Português-1Cleber GomesAinda não há avaliações
- MF 190 LBDocumento334 páginasMF 190 LBAnonymous HMEn61EAinda não há avaliações
- Magnum 260 AFS - Manual Do OperadorDocumento670 páginasMagnum 260 AFS - Manual Do Operadorwilian100% (1)
- CAMBIODocumento14 páginasCAMBIONilson RotherAinda não há avaliações
- SGE3Documento5 páginasSGE3RapazterrivelAinda não há avaliações
- Ipb-10 PT-BR PDFDocumento75 páginasIpb-10 PT-BR PDFOliveira Luis100% (1)
- Tabela de Códigos de Falhas Somente para Os Veículos Da Peugeot e CitroenDocumento1 páginaTabela de Códigos de Falhas Somente para Os Veículos Da Peugeot e Citroenbrunomelodaluz114Ainda não há avaliações
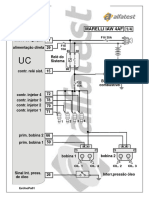
- Palio Iaw 4af PDFDocumento4 páginasPalio Iaw 4af PDFGuillermo ALVARADO RODRIGUEZAinda não há avaliações
- Manual Freio Disco Sime - Ref 5KDocumento24 páginasManual Freio Disco Sime - Ref 5KAbelio Tavares100% (1)
- PGC 2021 - PGC 2021 CgtiDocumento2 páginasPGC 2021 - PGC 2021 CgtiRouter casa DilmaAinda não há avaliações
- Apostila Operador de Empilhadeira - SENAIDocumento57 páginasApostila Operador de Empilhadeira - SENAITécnico em Segurança do Trabalho TSTAinda não há avaliações
- Embolos Virabrequim CcpaDocumento2 páginasEmbolos Virabrequim CcpaDiogo PurcinaAinda não há avaliações
- Bomba Netztch Lista de Peças CP 200004318Documento1 páginaBomba Netztch Lista de Peças CP 200004318admleonardo.negrisoliAinda não há avaliações
- Manual InversorDocumento3 páginasManual InversorRicardo FuchidaAinda não há avaliações
- AGC 200 Operators Manual 4189340607 BR PDFDocumento20 páginasAGC 200 Operators Manual 4189340607 BR PDFCaua Dias Dos SantosAinda não há avaliações
- Apostila LINHA PESADA PDFDocumento156 páginasApostila LINHA PESADA PDFBruno Lacerda JuniorAinda não há avaliações
- Manual Modulo de Perfuração Atualizado 07032023Documento10 páginasManual Modulo de Perfuração Atualizado 07032023Geotec EngenhariaAinda não há avaliações
- Manual Técnico PDV ES BateriaDocumento2 páginasManual Técnico PDV ES BateriaTek BreakAinda não há avaliações
- Catalogo Fusivel CartuchoDocumento7 páginasCatalogo Fusivel CartuchomathyAinda não há avaliações
- @@@STVF7 SERIESS ELEVATOR MANUAL (Ver2 - 201207 20) (1) - 21 - 30Documento10 páginas@@@STVF7 SERIESS ELEVATOR MANUAL (Ver2 - 201207 20) (1) - 21 - 30JULIOAinda não há avaliações
- Catálogo de Peças GSP (2017 - Atualmente)Documento116 páginasCatálogo de Peças GSP (2017 - Atualmente)Julio CesarAinda não há avaliações
- 365 Ideias De Posts Para Ter Um Instagram De Sucesso!No Everand365 Ideias De Posts Para Ter Um Instagram De Sucesso!Ainda não há avaliações
- Liberdade digital: O mais completo manual para empreender na internet e ter resultadosNo EverandLiberdade digital: O mais completo manual para empreender na internet e ter resultadosNota: 5 de 5 estrelas5/5 (10)
- Quero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNo EverandQuero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNota: 5 de 5 estrelas5/5 (26)
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNo EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNota: 5 de 5 estrelas5/5 (3)
- Análise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNo EverandAnálise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNota: 4 de 5 estrelas4/5 (4)
- Dimensionamento e Planejamento de Máquinas e Implementos AgrícolasNo EverandDimensionamento e Planejamento de Máquinas e Implementos AgrícolasNota: 1 de 5 estrelas1/5 (2)
- Gerenciamento da rotina do trabalho do dia-a-diaNo EverandGerenciamento da rotina do trabalho do dia-a-diaNota: 5 de 5 estrelas5/5 (2)
- 37 Regras para um Negócio Online de Sucesso: Como Desistir do Seu Emprego, Mudar Para o Paraíso e Ganhar Dinheiro Enquanto DormeNo Everand37 Regras para um Negócio Online de Sucesso: Como Desistir do Seu Emprego, Mudar Para o Paraíso e Ganhar Dinheiro Enquanto DormeNota: 1.5 de 5 estrelas1.5/5 (2)
- Segurança Da Informação DescomplicadaNo EverandSegurança Da Informação DescomplicadaAinda não há avaliações
- Eletricista Residencial E PredialNo EverandEletricista Residencial E PredialNota: 3 de 5 estrelas3/5 (1)
- Consultoria Especializada e Estratégias De Trade De ForexNo EverandConsultoria Especializada e Estratégias De Trade De ForexAinda não há avaliações
- Caixa de ferramentas da Arquitetura de Software: Como tornar suas aplicações mais escaláveis, confiáveis e segurasNo EverandCaixa de ferramentas da Arquitetura de Software: Como tornar suas aplicações mais escaláveis, confiáveis e segurasAinda não há avaliações
- IoT: Como Usar a "Internet Das Coisas" Para Alavancar Seus NegóciosNo EverandIoT: Como Usar a "Internet Das Coisas" Para Alavancar Seus NegóciosNota: 4 de 5 estrelas4/5 (2)
- Análise de Dados para Negócios: Torne-se um Mestre em Análise de DadosNo EverandAnálise de Dados para Negócios: Torne-se um Mestre em Análise de DadosAinda não há avaliações
- Modelos De Laudos Para Avaliação De Imóveis Urbanos E RuraisNo EverandModelos De Laudos Para Avaliação De Imóveis Urbanos E RuraisAinda não há avaliações