Você também pode gostar
- ET 136 EQTL Normas e Padroes Cabo de Aluminio MultiplexadoDocumento20 páginasET 136 EQTL Normas e Padroes Cabo de Aluminio MultiplexadoRamon FelipeAinda não há avaliações
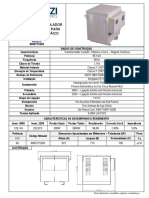
- Folheto Transformador 8500TTC003Documento1 páginaFolheto Transformador 8500TTC003Ramon FelipeAinda não há avaliações
- Haste Haste Haste: 18W ARC9000 ARC9000 ARC9000 ARC9000Documento2 páginasHaste Haste Haste: 18W ARC9000 ARC9000 ARC9000 ARC9000Ramon FelipeAinda não há avaliações
- QD4 Haste Haste HasteDocumento2 páginasQD4 Haste Haste HasteRamon FelipeAinda não há avaliações
- Guia de Precificação SPDADocumento4 páginasGuia de Precificação SPDARamon Felipe100% (2)
- Elétrica I ExercíciosDocumento1 páginaElétrica I ExercíciosRamon FelipeAinda não há avaliações
- 6.calculador Corrente Neutro NovoDocumento2 páginas6.calculador Corrente Neutro NovoRamon Felipe100% (1)
- NBR 8182 2011 - Cabo Multiplex 0,6 - 1kvDocumento31 páginasNBR 8182 2011 - Cabo Multiplex 0,6 - 1kvRamon FelipeAinda não há avaliações
- TEORIA ELETROMAG II CAP 10 - FimDocumento95 páginasTEORIA ELETROMAG II CAP 10 - FimRamon FelipeAinda não há avaliações
- NT.020.EQTL .Normas e Padrões Conexão de Microgeração Distribuida Ao Sistema de DistribuiçãoDocumento84 páginasNT.020.EQTL .Normas e Padrões Conexão de Microgeração Distribuida Ao Sistema de DistribuiçãoJoao PauloAinda não há avaliações
- Haste Haste HasteDocumento2 páginasHaste Haste HasteRamon FelipeAinda não há avaliações
- QD1Documento2 páginasQD1Ramon FelipeAinda não há avaliações
- Diagnostico e Auditoria EnergéticoDocumento12 páginasDiagnostico e Auditoria EnergéticoRamon FelipeAinda não há avaliações
- Livro Cabos Eletricos de Baixa Tensão Conforme NBR 5410 Hilton Moreno Cobrecom Rev1 PDFDocumento188 páginasLivro Cabos Eletricos de Baixa Tensão Conforme NBR 5410 Hilton Moreno Cobrecom Rev1 PDFFabricio Almeida100% (3)
- GeologiaDocumento11 páginasGeologiaRamon FelipeAinda não há avaliações
- Sistema FotovoltaicosDocumento71 páginasSistema FotovoltaicosRamon FelipeAinda não há avaliações
- Energia Eficiente CasaDocumento5 páginasEnergia Eficiente CasaRamon FelipeAinda não há avaliações
- 141-Texto Do Artigo-141-1-10-20180416 PDFDocumento10 páginas141-Texto Do Artigo-141-1-10-20180416 PDFPaulo GolbaAinda não há avaliações
- Projeto Comercial - Estacionamento SolarDocumento1 páginaProjeto Comercial - Estacionamento SolarGuilherme MartinsAinda não há avaliações
- QcellsDocumento2 páginasQcellsThiago MeloAinda não há avaliações
- Projeto Residencial Com Inversor Central 1Documento1 páginaProjeto Residencial Com Inversor Central 1Guilherme MartinsAinda não há avaliações
- ZigBee: tecnologia sem fio de baixo custo para redes de equipamentos simplesDocumento4 páginasZigBee: tecnologia sem fio de baixo custo para redes de equipamentos simplesRamon FelipeAinda não há avaliações
- SistemaGeraçãoPrópriaDocumento1 páginaSistemaGeraçãoPrópriaGuilherme MartinsAinda não há avaliações
- Modelo RelatórioDocumento4 páginasModelo RelatórioRamon FelipeAinda não há avaliações
- Catalogo de Cabines MT 2017Documento16 páginasCatalogo de Cabines MT 2017Sandro Luiz SchoeffelAinda não há avaliações
- Fronius Primo Inverter Data SheetDocumento4 páginasFronius Primo Inverter Data SheetMauricio CrispimAinda não há avaliações
- The Last Circuito RC - Paralelo em Regime CADocumento6 páginasThe Last Circuito RC - Paralelo em Regime CARamon FelipeAinda não há avaliações
- Consumo Energia ResidênciaDocumento3 páginasConsumo Energia ResidênciaRamon FelipeAinda não há avaliações
- Normas e Procedimentos de EstágioDocumento12 páginasNormas e Procedimentos de EstágioRamon FelipeAinda não há avaliações
- Arquiteturas Von Neumann e Harvard: Diferenças entre os Microcontroladores PIC e OutrosDocumento10 páginasArquiteturas Von Neumann e Harvard: Diferenças entre os Microcontroladores PIC e OutrosAriel HennigAinda não há avaliações
- COMUNICAÇÃO ENTRE MEMÓRIA PRINCIPAL E UCPDocumento6 páginasCOMUNICAÇÃO ENTRE MEMÓRIA PRINCIPAL E UCPjowlianoAinda não há avaliações
- Mapade KarnaughDocumento14 páginasMapade KarnaughHelder Anibal HerminiAinda não há avaliações
- APX2 - 2020-1 - Gabarito - Organização de ComputadoresDocumento4 páginasAPX2 - 2020-1 - Gabarito - Organização de ComputadoresGabriel De Souza FerreiraAinda não há avaliações
- Microcontrolador PIC16F877ADocumento40 páginasMicrocontrolador PIC16F877AMarcelo_Donisete100% (3)
- Integrated circuits component listDocumento51 páginasIntegrated circuits component listElliot EspinozaAinda não há avaliações
- Módulo Lógico UniversalDocumento49 páginasMódulo Lógico UniversalEdson Pires da SilvaAinda não há avaliações
- ContSíncDocumento7 páginasContSíncExpeditoAinda não há avaliações
- Contadores digitais assíncronos e síncronosDocumento36 páginasContadores digitais assíncronos e síncronosFelipe ScheidtAinda não há avaliações
- Lista de exercícios avaliativa de circuitos digitaisDocumento9 páginasLista de exercícios avaliativa de circuitos digitaisElder SantosAinda não há avaliações
- RDP0028 Planilha para Controle de Estoque Com Graficos DinamicosDocumento7 páginasRDP0028 Planilha para Controle de Estoque Com Graficos DinamicosO Rei das PlanilhasAinda não há avaliações
- 06 - Flip FlopDocumento50 páginas06 - Flip Flopbersilveira8645Ainda não há avaliações
- Arquitectura Interna Do Computador - Mário SilvaDocumento22 páginasArquitectura Interna Do Computador - Mário Silvachilamen100% (1)
- Teste de Sistemas DigitaisDocumento6 páginasTeste de Sistemas DigitaisCeubotoAinda não há avaliações
- Circuitos Combinacionais IntroduçãoDocumento67 páginasCircuitos Combinacionais IntroduçãoTiagoFariaAinda não há avaliações
- RISC CISC ArquiteturasDocumento23 páginasRISC CISC Arquiteturasmaia_owneedAinda não há avaliações
- CMOS Organizados Por FunçãoDocumento1 páginaCMOS Organizados Por FunçãoEletecAinda não há avaliações
- Cap 3Documento9 páginasCap 3David lobo GolvimAinda não há avaliações
- Componentes de uma placa-mãe e suas funçõesDocumento3 páginasComponentes de uma placa-mãe e suas funçõesalexsand farias100% (1)
- Comunicação SerialDocumento24 páginasComunicação SerialstephaniebraguinAinda não há avaliações
- Organização de computadoresDocumento31 páginasOrganização de computadorescorreiogutaAinda não há avaliações
- MUX seleciona 1 de N entradasDocumento8 páginasMUX seleciona 1 de N entradasRafael OliveiraAinda não há avaliações
- Contadores síncronos decrescentes e CIs 74ALS163 e 74ALS191Documento27 páginasContadores síncronos decrescentes e CIs 74ALS163 e 74ALS191rmarques85Ainda não há avaliações
- PROVA Sistemas DigitaisDocumento12 páginasPROVA Sistemas DigitaisJulia FlorencioAinda não há avaliações
- Implementação de FSMsDocumento38 páginasImplementação de FSMsJoão Pedro CerqueiraAinda não há avaliações
- Análise de Circuitos Digitais - Flip-Flops e seus tiposDocumento13 páginasAnálise de Circuitos Digitais - Flip-Flops e seus tiposThaynson AlfredoAinda não há avaliações