Você também pode gostar
- Lista de Trabalhos 4 - CiclonagemDocumento3 páginasLista de Trabalhos 4 - CiclonagemLuana Macedo100% (1)
- Apostila UFPB LatexDocumento87 páginasApostila UFPB LatexK Wolf GetoutAinda não há avaliações
- CunhaDocumento16 páginasCunhaAntonio Carlos Bana ChiellaAinda não há avaliações
- 2-Derivadas ParciaisDocumento15 páginas2-Derivadas ParciaisFelipe FalcaoAinda não há avaliações
- Atuadores ElétricosDocumento27 páginasAtuadores ElétricosAntonio Carlos Bana ChiellaAinda não há avaliações
- EncoderDocumento80 páginasEncoderAntonio Carlos Bana ChiellaAinda não há avaliações
- Lista de Exercícios - SoluçõesDocumento3 páginasLista de Exercícios - SoluçõesJeane Rodrigues BrederAinda não há avaliações
- 1 Análise Crítica Da Filosofia de WittgensteinDocumento2 páginas1 Análise Crítica Da Filosofia de WittgensteinRoberto BragaAinda não há avaliações
- Mzup3 Fichas Recuperacao 2anoDocumento32 páginasMzup3 Fichas Recuperacao 2anoBeatriz Galharda de LavosAinda não há avaliações
- Ap Matemática 6 Série EfDocumento304 páginasAp Matemática 6 Série EfAlexandre MarianoAinda não há avaliações
- 2021 2022 01 Exp9 Teste1 Movimentos Na Terra Ae EstruturaDocumento2 páginas2021 2022 01 Exp9 Teste1 Movimentos Na Terra Ae EstruturaSandra FariaAinda não há avaliações
- Apostila de Brigada de EmergênciaDocumento37 páginasApostila de Brigada de EmergênciaLucas SerranoAinda não há avaliações
- Aula 1 - Introdução A Estradas de Rodagem e Projeto GeométricoDocumento51 páginasAula 1 - Introdução A Estradas de Rodagem e Projeto GeométricoFabrício GuimarãesAinda não há avaliações
- Como Usar A HP-50g para CalculoDocumento12 páginasComo Usar A HP-50g para CalculoEliezerAinda não há avaliações
- Manual Fresamento NX8Documento62 páginasManual Fresamento NX8abelmil123Ainda não há avaliações
- Oficina Pedagogica - PLANO DE AULADocumento5 páginasOficina Pedagogica - PLANO DE AULAMara SilvaAinda não há avaliações
- Aula 5 - Teoria Da ComputaçãoDocumento12 páginasAula 5 - Teoria Da ComputaçãoCristianeAinda não há avaliações
- Receitas - Clara de SousaDocumento10 páginasReceitas - Clara de SousaAna AbreuAinda não há avaliações
- Filipetas Onduline Clássica FITDocumento2 páginasFilipetas Onduline Clássica FIT1otoAinda não há avaliações
- Método para Bateria Por Daniel BateraDocumento31 páginasMétodo para Bateria Por Daniel BateraDaniel SilvaAinda não há avaliações
- Resumo - BiomecanicaDocumento9 páginasResumo - BiomecanicaSandraMorethAinda não há avaliações
- Quest 07 - Revisão - GabDocumento8 páginasQuest 07 - Revisão - GabmisaelinacioAinda não há avaliações
- Análise de Causa RaizDocumento32 páginasAnálise de Causa Raizjulio_pastoreAinda não há avaliações
- Artigo Edao-Comp - Reg - Primária - Cenários - Baixa - Hidraulicidade PDFDocumento15 páginasArtigo Edao-Comp - Reg - Primária - Cenários - Baixa - Hidraulicidade PDFgdcerq8134Ainda não há avaliações
- PPR - DelineadoresDocumento1 páginaPPR - DelineadoresleticiaAinda não há avaliações
- Teoria de Redes PPoEDocumento8 páginasTeoria de Redes PPoEJhenefer SilvaAinda não há avaliações
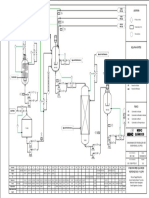
- PFD BPA Final-Páginas-1Documento1 páginaPFD BPA Final-Páginas-1Luiz Rodrigo AssisAinda não há avaliações
- Ficha de Trabalho - Tabela Periódica - 10º Ano QuímicaDocumento6 páginasFicha de Trabalho - Tabela Periódica - 10º Ano QuímicaTeresa CaldeiraAinda não há avaliações
- Materia Matematica Curso SoluçaoDocumento8 páginasMateria Matematica Curso SoluçaoJean LucasAinda não há avaliações
- Balanceamento de Maquinas Rotativas Com 1 Ou 2 Planos de Correcao PDFDocumento6 páginasBalanceamento de Maquinas Rotativas Com 1 Ou 2 Planos de Correcao PDFset_ltdaAinda não há avaliações
- 001 Manual Esteira Atheltic RunnerDocumento8 páginas001 Manual Esteira Atheltic RunnerLulii RisottoAinda não há avaliações
- Fichas de Salgados CPTDocumento32 páginasFichas de Salgados CPTRegina HelenaAinda não há avaliações
- Colaborar - Av1 - Linguagem Orientada A ObjetosDocumento3 páginasColaborar - Av1 - Linguagem Orientada A Objetoselyasmin007Ainda não há avaliações
- Densimetria de Materiais GranuladoDocumento5 páginasDensimetria de Materiais GranuladoGirlane SantosAinda não há avaliações
- Exercicio - de - Fixacao Balanço de MassasDocumento1 páginaExercicio - de - Fixacao Balanço de MassasSamantha RibeiroAinda não há avaliações