Escolar Documentos
Profissional Documentos
Cultura Documentos
Furuta PDF
Furuta PDF
Enviado por
gusalemanTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Furuta PDF
Furuta PDF
Enviado por
gusalemanDireitos autorais:
Formatos disponíveis
SICE-ICASE In t e r n a t i o n a l J o i n t Co n f e r e n c e 2 0 0 6
O c t . 1 8 -2 1 , 2 0 0 6 i n B e x c o , B u s a n , K o r e a
D e s i g n o f c o n t r o l m e t h o d t o r o t a t e pe n d u l u m
Y a s u t a k a B AB A1 , M a s a k i IZ U T SU 2 , Y a o d o n g P AN 3 , K a t s u h i s a FU RU T A4
D e pa r t m e n t o f Co m pu t e r a n d Sy s t e m s En g i n e e r i n g , T o k y o D e n k i U n i v e r s i t y ( T D U ) , Sa i t a m a , J AP AN
( T e l : 0 49 -2 9 6 -2 9 1 1 ; E-m a i l : b a b a @ f u r u t a l a b . k . d e n d a i . a c . j p)
2 G r a d u a t e Sc h o o l o f Ad v a n c e d Sc i e n c e a n d T e c h n o l o g y Ad v a n c e d M u l t i d i s c i pl i n a r y En g i n e e r i n g , T D U , Sa i t a m a ,
J AP AN
( T e l : 0 49 -2 9 6 -2 9 1 1 ; E-m a i l : i d u t s u @ f u r u t a l a b . k . d e n d a i . a c . j p)
3 2 1 t h Ce n t u r y CO E P r o j e c t O f f i c e , T D U , Sa i t a m a , J AP AN
( T e l : 0 49 -2 9 6 -2 9 1 1 ; E-m a i l : pa n @ h a m . c o e . d e n d a i . a c . j p)
4
D e pa r t m e n t o f Co m pu t e r a n d Sy s t e m s En g i n e e r i n g , T D U , Sa i t a m a , J AP AN
( T e l : 0 49 -2 9 6 -2 9 1 1 ; E-m a i l : f u r u t a @ k . d e n d a i . a c . j p)
Ab s t r a c t : In t h e c o n t r o l o f a pe n d u l u m , t h e s t a b i l i z a t i o n a t t h e u pr i g h t po s i t i o n h a s b e e n a i m e d . T h i s pa pe r pr o po s e s
a n a n g l e -b a s e d c o n t r o l m e t h o d t o r o t a t e t h e pe n d u l u m a n d t o s t a b i l i z e t h e b a s e l i n k . T h e r o t a t i o n a l c o n t r o l s y s t e m i s
d e s i g n e d t o l e t t h e pe n d u l u m t r a c k t h e r o t a t i o n o f a r e f e r e n c e pe n d u l u m . An d t h e s t a b i l i z a t i o n o f t h e b a s e l i n k i s d e s i g n e d
b y t h e s t a t e -d e pe n d e n t Ri c c a t i e q u a t i o n ( SD RE) b a s e d o n z e r o -d y n a m i c s o f t h e pe n d u l u m . T h e s i m u l a t i o n r e s u l t s h o w t h e
e f f e c t i v e n e s s .
K e y w o r d s : r o t a t i o n c o n t r o l , r e f e r e n c e m o d e l , SD RE.
1 . IN T RO D U CT IO N
T h e pe n d u l u m h a s b e e n s t u d i e d f o r d e s i g n i n g a c o n -
t r o l l e r t o s t a b i l i z e a t i t s u n s t a b l e u pr i g h t po s i t i o n . T h e
l i n e a r c o n t r o l l e r h a s b e e n u s e d f o r t h e s t a b i l i z a t i o n o f
t h e n o n l i n e a r s y s t e m a t t h e u n s t a b l e e q u i l i b r i u m [ 4] . Re -
c e n t l y n o n l i n e a r c o n t r o l s y s t e m s a r e s t u d i e d f o r s w i n g -
i n g u p f r o m t h e s t a b l e t o t h e u n s t a b l e e q u i l i b r i u m s [ 1 ] [ 2 ] .
T h e m o r e i n t e r e s t i n g c o n t r o l pr o b l e m i s t h e r o t a t i o n o f
t h e pe n d u l u m . Iw a s h i r o , Fu r u t a a n d As t r o m d e s i g n e d a
c o n t r o l s y s t e m f o r r o t a t i n g t h e u ppe r po s i t i o n o f t h e d o u -
b l e pe n d u l u m [ 2 ] . H o w e v e r , t h e d e s i g n h a s b e e n d o n e i n
t h e a d h o c w a y . K o m i n e a n d o t h e r s pr o po s e d t o d e s i g n
t h e c o n t r o l l e r f o r r o t a t i n g a d o u b l e pe n d u l u m b a s e d o n
t h e po l e a s s i g n m e n t m e t h o d [ 5 ] . It w o r k s s a t i s f a c t o r i l y
b u t s t i l l t h e ph y s i c a l e x pl a n a t i o n f o r t h e c o n t r o l s y s t e m
d e s i g n w a s n o t s u f f i c i e n t . T h e c o n t r o l s y s t e m s h o u l d b e
d e s i g n e d f o r a l l po s s i b l e r o t a t i o n a n d i s d i f f i c u l t t o d e s i g n
b a s e d o n t h e t i m e .
T h i s pa pe r pr o po s e s t o d e s i g n a c o n t r o l l e r f o r t h e pe n -
d u l u m w h i c h t r a c k s t h e r o t a t i o n t r a j e c t o r y o f a n i d e a l pe n -
d u l u m . T h e a c t u a l pe n d u l u m f o l l o w i n g t h e r e f e r e n c e r o -
t a t i o n a l t r a j e c t o r y [ 6 ] . T h i s m e t h o d i s a c h i e v e d b y r e d u c -
i n g t h e d i f f e r e n c e b e t w e e n t h e a n g u l a r v e l o c i t y o f t h e a c -
t u a l pe n d u l u m a n d t h e r e f e r e n c e . T h e n e w c o n t r o l d e s i g n
m e t h o d b a s e d o n t h e a n g l e i s pr o po s e d . H o w e v e r , t h i s
m e t h o d d o e s n ' t pa y a t t e n t i o n o n t h e s t a b i l i t y o f t h e b a s e
l i n k o f t h e pe n d u l u m . T h e r e f o r e , t h e b a s e l i n k i s s t a b i -
l i z e d b y SD RE t h a t pa y s a t t e n t i o n o n l y t o t h e b a s e . T h e
o pt i m a l c o n t r o l l a w t o w h i c h t h e b a s e i s s t a b i l i z e d i s o b -
t a i n e d a t e v e r y c o n t r o l c y c l e b y SD RE[ 3 ] [ 7 ] [ 8 ] [ 9 ] . T h e s e
m e t h o d a r e e v a l u a t e d b y s i m u l a t i o n w i t h Fu r u t a pe n d u -
l u m .
2 . FU RU T A P EN D U LU M
Fi g . 1 s h o w s a s c h e m a t i c m o d e l o f t h e pe n d u l u m . T h e
u pr i g h t po s i t i o n o f 0 2 i s a s s u m e d t o b e 0 [ r a d ] .
. . . . . . . 0 % 2
i r 2 u J
Fi g . 1 M o d e l o f t h e Fu r u t a pe n d u l u m
T a b l e 1 P e n d u l u m pa r a m e t e r s ( i =1 , 2 )
m i [ k g ] M a s s
1 i [ m ] Le n g t h o f l i n k
r i [ m ] Le n g t h f r o m h i n g e t o CO G
J i [ k g . m ] In e r t i a a r o u n d CO G
Ci [ N m / r a d ] Co e f f i c i e n t o f v i s c o u s
0 i [ r a d ] An g l e
T i [ N m ] T o r q u e
T h e d y n a m i c e q u a t i o n o f t h e pe n d u l u m c a n b e d e r i v e d
b y t h e La g r a n g e m e t h o d
M ( 0 ) 0 + H ( O , 0 ) + G ( O ) T
( 1 )
w h e r e 0 a n d T a r e t h e s t a t e a n d t h e c o n t r o l i n pu t v a r i a b l e s ,
r e s pe c t i v e l y d e f i n e d a s
0 0 2 '
T
T
8 9 -9 5 0 0 3 8 -5 -5 9 8 5 6 0 / 0 6 / $ 1 0 C 2 0 0 6 ICASE
2 3 8 1
0 1 a n d 0 2 a r e t h e r o t a t i o n a n g l e s o f t h e m o t o r a n d t h e
pe n d u l u m ( i . e . l i n k 2 a s m e n t i o n e d b e l o w ) . T i i s t h e
c o n t r o l i n pu t o f t h e m o t o r . T h e m a t r i c e s M ( 0 ) , H ( 0 , 0 ) ,
a n d G ( 0 ) a r e d e t e r m i n e d r e s pe c t i v e l y b y
Eq . ( 7 ) s h o w s t h e i n t e g r a t i o n o f t h e r i g h t -h a n d s i d e o f
Eq . ( 4) .
0 2 0 2
0 r d 0 r = s O i s n
2 0 , +
m r 2 s i n O i ) d 0 r
( 7 )
E m 1 1 M i 2 1
i
M 2 1 M 2 2 j
[
0 ] G ( 0 ) =
Eg
J a + J p s i n 2 0 2
-m 2 1 l r 2 c o s 0 2
J p
j p
-m 2 1 1 r 2 s i n 0 2 0 2 +
J p0 l A2
s i n 2 0 2 + C0 l 1
-2 J P s i n 2 O O 2 ' +CA
0
9 2 -m 2 r 2 g s i n 0 2 ,
w h e r e J a =J 1
+m i r l 1 +m 2 l 2 , a n d J p
=
J 2 +m 2 r & 2
Eq . ( l ) i s u s e d t o d e s i g n t h e i n pu t i n t h e f o l l o w i n g s e c t i o n .
3 . D ESIG N O F CO N T RO L M ET H O D
3 . 1 D e t e r m i n a t i o n o f r e f e r e n c e m o d e l
Co n s i d e r t h e m o t i o n e q u a t i o n o f t h e l i n k 2 n o w .
-m 2 1 l r 2 c o s 0 2 *O 1 +
J p0 2 J p
s i n 2 0 2 0 1 2
-m 2 r 2 g s i n 0 2 + C2 0 2 =0 ( 2 )
w h i c h c a n b e r e w r i t t e n a s
0 2 ( - J p
s i n
2 0 2 0 1
+
m 2 r 2 g
s i n
0 2
J p2
T h e n , t h e r e f e r e n c e a n g u l a r a c c e l e r a t i o n i s d e t e r m i n e d
b y
O r ( 0 2 )
=
0 r 2 ( ) +2 O r d O r ( 8 )
3 . 2 D e s i g n o f r o t a t i o n a l c o n t r o l i n pu t
We c h o o s e V ( 0 2 ) g i v e n b y Eq . ( 9 ) a s a Ly a pu n o v f u n c -
t i o n f o r t h e a n g u l a r s pe e d o f t h e a c t u a l m o d e l t o t r a c k o n e
o f t h e r e f e r e n c e m o d e l . T h e d i f f e r e n t i a t i o n o f
V ( 0 2 )
i s
s h o w n b e l o w .
( 9 )
u t h a t r e d u c e s t h e t r a c k i n g e r r o r b e t w e e n 0 2 a n d 0 r c a n
b e o b t a i n e d b y r e d u c i n g V ( 0 2 ) .
d Eq ( ( 2 s r i b d 2 d s 2 )
Eq . ( I1 0 ) i s r e w r i t t e n
b y u s i n g Eq . ( S) a s
Eq . ( I 1 ) .
d V ( 0 2 )
d O 2
T h u s ,
d V ( 0 2 )
d O 2
0 2 -0 r
0 2
O r
( 1 0 )
( 1 1 )
0 2 -a r |
I
s i n 2 0 2 0 i 2 +
2 2 g
Si n 0 2
0 2 2 J 2 + m 2 r 2 2
m 2 2 r 2
1 0 2 2 U - s i n 2 0 r
2
J 2 +m 2 r 2 2
-C2 2 + m 2 r 2 c O s 0 2 U
f 2 r . r g
s i n
2
- ) C2 6 2
J r + T r , r
2 ( 3 )
w h e r e u 1 1 0 1 i s a n a l t e r n a t i v e c o n t r o l i n pu t f o r l i n k 2 .
N e x t , w e c o n s i d e r a r e f e r e n c e m o d e l w i t h t h e s a m e
s t r u c t u r e t o t h e a c t u a l pe n d u l u m e x c e pt t h a t u 0 a n d
C2 =0 i n t h e r e f e r e n c e o n e .
1 i 0 , r g s n 0 4
2 J r +
r n r r r
w h e r e r o f t h e s u b s c r i pt s h o w s t h e pa r a m e t e r o f t h e r e f -
e r e n c e m o d e l ( i . e . 0 r i s t h e a n g l e o f t h e pe n d u l u m i n t h e
r e f e r e n c e m o d e l ) . 0 r i s r e w r i t t e n a s Eq . ( 5 ) .
d O r d O r
r d t
d O r
1
d 0 r 2
2 d O r '
( 5 )
i f t h e a n g u l a r s pe e d O r i s d e r i v e d f r o m t h e a c t u a l a n g l e 0 ,
t h e a n g u l a r a c c e l e r a t i o n 0 r i s a l s o d e r i v e d .
T h e r e f e r e n c e a n g u l a r s pe e d 0 r i s d e r i v e d f r o m t h e d e f -
i n i t e i n t e g r a t i o n f r o m 0 t o 0 2 i n Eq . ( 4) . Eq . ( 6 ) s h o w s t h e
i n t e g r a t i o n o f t h e l e f t -h a n d s i d e o f Eq . ( 4) .
0 2
O r d O r
2
( 0 r 2 ( 0 2 )
r 2 ( 0 ) ) ( 6 )
O n e o f t h e i n pu t t e r m w h i c h i s c o n s t a n t l y n e g a t i v e v a l u e
i s d e c i d e d b y Eq . ( 1 3 ) w i t h u s i n g t h e s i g n u m f u n c t i o n a n d
t h e s a t u r a t i o n f u n c t i o n .
u =
Sa t , l i ( -k ( 0 2
CO S
0 2
2 r !9 \Sg
6 2
( 1 3
w h e r e k i s a po s i t i v e c o n s t a n t .
Fu r t h e r m o r e , pa r a m e t e r s a r e a s s u m e d a s
0 r
=
0 2 , n r
=
n 2 , J r
=
J 2 .
T h e s e v a l u e s a n d u o f Eq . ( 1 3 ) a r e s u b s t i t u t e d t o Eq . ( 1 2 ) .
d V ( 0 2 ) 0 2 -r ( M 2 r 2 g i
d 2 2 J 2 + 2 r 2
s i n 0 2
d
0 2 r
+ m 2 r 2
CO S0 2 U -C2 6 2
J 2 + m 2 r 2 2
m r r r g
r m , , r r r s i n 0 r
J r + T n r r 2
( 1 4)
T h e i n pu t t e r m i s n e g a t i v e v a l u e c o n s t a n t l y . Al s o , T h u s ,
t h e c o n d i t i o n t h a t a c h i e v e s d V ( 0 2 )
< 0 c a n b e o b t a i n e d
d b 2
b y Eq . ( 1 5 ) .
r r < r 2 ( 1 5 )
2 3 8 2
M ( 0 )
H ( 0 , 0 )
T n 1 =
h 2
9 1
( 1 2 )
1
2
v
( 0 2 )
=
. 2 k
2
In t h e c a s e o f t h i s c o n d i t i o n ,
d V ( 0 2 )
< 0 h o l d s a n d V ( 0 2 )
d t
w i l l d e c r e a s e .
Wh e n t h e pe n d u l u m i s i n i t s d o w n po s i t i o n , T i
( J 1 +
m 2 1 2 )
0 1 .
T h u s t h e r e l a t i o n b e t w e e n u a n d T i c a n
b e o b t a i n e d a s
T =( J 1 +
m 2 1 )
) I,
( 1 6 )
T h e r e l a t i o n b e t w e e n u a n d T i i s c o n s t a n t . T h e n , t h e i n pu t
o f Eq . ( 1 3 ) c a n b e a ppl i e d f o r t h e pe n d u l u m c o n t r o l .
3 . 3 Si m u l a t i o n r e s u l t s
T o c o n f i r m t h e e f f e c t i v e n e s s o f t h e pr o po s e d m e t h o d ,
i t w a s s i m u l a t e d w i t h t h e Fu r u t a pe n d u l u m . T a b . 2 s h o w s
t h e c o n d i t i o n o f t h e s i m u l a t i o n .
T a b l e 2 Si m u l a t i o n pa r a m e t e r s
m n l 0 . 0 8 0 1 T 0 . 1 0 0
M 2
0 . 0 9 8
-2
0 . 1 48
1 1 0 . 1 5 0 r r 0 . 0 3 7
1 2 0 . 2 1 5 u l i m 5 . 0
J 1 3 . 0 0 x 1 0 -2 k 1 . 0 0
J 2 2 . 6 2 x 1 0 -3
2 5
2 0
1 5
( v 1 0
- 5
0 >
o
0 5
-1 5
-2 0
-2 5
6 r
d t h 1
d t h 2
d t h _ r
2 3 4 5 6 7 8 9 1 0
t i m e r s ]
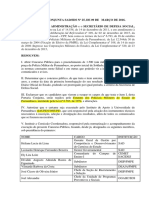
Fi g . 3 a n g u l a r v e l o c i t y
U
4
2
-2
-2
T h e f o l l o w i n g f i g u r e s s h o w t h e s i m u l a t i o n r e s u l t .
Fi g . 2 s h o w s t h e a n g l e o f t h e pe n d u l u m , w h e r e " t h l " a n d
" t h 2 " m e a n 0 1 a n d 0 2 r e s pe c t i v e l y . Fi g . 3 s h o w s t h e a n -
g u l a r v e l o c i t y o f t h e a c t u a l pe n d u l u m a n d t h e r e f e r e n c e
m o d e l . Fi g . 4 s h o w s t h e i n pu t t h a t a ppl i e s t h e pe n d u l u m .
Fi g . 5 s h o w s t h e e r r o r o f 0 2 a n d O r . Fi g . 6 s h o w s V ( 0 2 ) .
It c a n b e r e a d f r o m Fi g . 3 a n d Fi g . 5 t h a t t h e a c t u a l pe n -
d u l u m f o l l o w s t h e r e f e r e n c e . An d V ( 0 2 ) a ppr o a c h e s 0 i n
Fi g . 6 . Al s o , i t c a n b e r e a d f r o m Fi g . 4 t h a t t h e i n pu t i s
a ppl i e d w i t h o u t c h a t t e r i n g .
T h u s , t h e e f f e c t i v e n e s s o f t h e r o t a t i o n c o n t r o l s h o u l d
b e c o n f i r m e d . H o w e v e r , i t c a n b e r e a d t h a t t h e 0 1 k e e ps
r o t a t i n g f r o m Fi g . 2 a n d Fi g . 3 . T h e r e f o r e , t h e i n pu t t h a t
c o n s i d e r s t h e s t a b i l i t y o f 0 1 i s d e c i d e d i n t h e f o l l o w i n g
s e c t i o n .
-4
-6
0 1 2 3 4 5 6
t i m e r s ]
Fi g . 4 i n pu t
1 8
1 6
1 4
1 2
1 0
0
6
4
2
0 -
-2 -
t h 1
t h 2
0
1 0
-5
a -1 0
-1 5
-2 0
7 8 9 1 0
e r r o r _ o f _ d t h
<, -/ " ., \. .-\ % . , -/ -\ . . . . . . . . v , \/ P , , a , -/ \- -,
, \
" . . . . . . . . . . . . . \-
2 3 4 5 6 7 8 9 1 0
t i m e r s ]
Fi g . 5 e r r o r o f 0 2
[ Ly a pn o v f u n c t i o n ]
c \j
4
-2 5
0 1 2 3 4 5 6 7 8 9 1 0
t i m e r s ]
2
t i m e r s ]
6 8 1 0
Fi g . 6 V ( 0 2 )
2 3 8 3
Fi g . 2 a n g l e
4. ST AB ILIZ AT IO N O F T H E B ASE LIN K
T h e e f f e c t i v e n e s s o f t h e r o t a t i o n c o n t r o l w a s d e s c r i b e d
a b o v e s e c t i o n . In t h i s s e c t i o n , l e t t h e a c t u a l pe n d u l u m
a l r e a d y t r a c k s t h e i d e a l o n e . U n d e r s u c h a c o n d i t i o n , t h e
a n g l e w i l l b e k e pt c o n s t a n t b y s t a b i l i z i n g t h e b a s e l i n k . A
s pe c i f i c m e t h o d i s d e s c r i b e d a s f o l l o w s .
4. 1 St a t e s pa c e r e pr e s e n t a t i o n
Wh e n a n a c t u a l pe n d u l u m t r a c k s t h e pe n d u l u m o f t h e
i d e a l , 0 2 a ppr o a c h e s 0 r . At t h i s t i m e , T i a ppr o a c h e s 0 .
T h e m o t i o n e q u a t i o n o f t h e pe n d u l u m b e c o m e s Eq . ( 1 7 )
w h e n a s s u m i n g T =0 .
M s FLf l j + H s FLf l j + G s FLf l = O u s ( 1 7 )
M h e [ 0 2 0 2
w h e r e
M s
= M ( 0 )
F h i , h 1 2 1
s L
h 2 1
h 2 2
]
'
u s
=
O
h i ,
=
J , 6 2 s i n 2 0 2 +Cl
h 1 2 -m 2 1 l r 2 0 2 s i n 0 2
h 2 l
h 2 2
g i l
[
g 9 l
9 2 1
9 1 2 1
9 2 2 j
1
-2
J p
1 s i n 2 0 2
2
C2
9 1 2 =9 2 1 =0
1
9 2 2 -0 m 2 r 2 g s i n 0 2 .
In Eq . ( 1 7 ) , l e t t h e s t a t e v e c t o r x =[ 0 1 , 0 2 , 0 1 , 0 2 1 T , a n d
t h e s t a t e s pa c e r e pr e s e n t a t i o n c a n b e s h o w n b y Eq . ( 1 8 )
0 2 X 2 1 G 1 2 I H 5
0 X
[
2 x
-M ' -
] x +[ M 5 -[
j
j
s
( 1 )
Fu r t h e r m o r e , t h e s t a t e v e c t o r i s a s s u m e d t o b e x 1
[ 0 1 , o l ] T , a n d t h e s t a t e s pa c e r e pr e s e n t a t i o n t h a t o n l y
c o n s i d e r s t h e b a s e l i n k i s s h o w n b y Eq . ( 1 9 )
1
=
A1 ( x l ) x l + B 1 ( x l ) u s ( 1 9 )
w h e r e
0 1
AI( x i ) =
0 m l 2 h 2 l -T 2 2 h 1 j
[ O
m l l T m 2 2 -m l 2 m 2
J
0
B i ( x i ) =
M 2 2
L
m l l m 2 2 -m l 2 m 2 -
4. 2 D e s i g n o f t h e f e e d b a c k g a i n
u s : =-Fx 1 a n d Eq . ( 1 9 ) c a n b e t r a n s f o r m e d Eq . ( 2 0 ) .
1 =
( Al ( x i )
-B
( x ) F( x i ) ) x i ( 2 0 )
w h e r e F( x i ) i s t h e f e e d b a c k g a i n o f t h i s s y s t e m . F( x i )
i s d e s i g n e d b y SD RE. SD RE i s a m e t h o d t h a t c a l c u l a t e
t h e o pt i m a l f e e d b a c k g a i n b y a c q u i r i n g t h e s t a t e o f t h e
pe n d u l u m a t e v e r y c o n t r o l c y c l e a n d o b t a i n i n g t h e Ri c c a t i
e q u a t i o n . Ev a l u a t i o n f u n c t i o n J ( x i ) i s s e t f o r Eq . ( 1 9 ) .
An d u s t o m i n i m i z e t h e e v a l u a t i o n f u n c t i o n b y s o l v i n g
t h e Ri c c a t i e q u a t i o n i s o b t a i n e d .
J ( x 1 )
=J X Q( x i ) +
u s R( x l ) u 5 ,
( 2 1 )
w h e r e Q( x 1 ) > 0 a n d R( x i ) > 0 .
T h e Ri c c a t i e q u a t i o n i s s h o w n b y Eq . ( 2 2 ) .
P ( x i ) Al ( x i )
+
Al ( x i ) T P ( x )
+
Q( x i )
-P ( x 1 ) B 1 ( x 1 ) R( x 1 ) -l B ( x i ) T P ( X l )
=0
( 2 2 )
T h e f e e d b a c k g a i n i s s h o w n b y Eq . ( 2 3 ) .
F R-l B T p ( 2 3 )
T h u s , u s t o m i n i m i z e t h e e v a l u a t i o n f u n c t i o n i s o b t a i n e d .
u s =-Fx 1 ( 2 4)
T h e i n pu t u t h a t t r a c k s t h e i d e a l pe n d u l u m a n d c o n s i d e r s
t h e s t a b i l i z a t i o n o f t h e b a s e l i n k i s f i n a l l y o b t a i n e d f r o m
l i n e a r s u m o f Eq . ( 1 3 ) a n d Eq . ( 2 4) .
=
Sa t u l i
( -k ( 0 2
r ) ( CO S0 2 ) u
0 2 r ) s g n 2 ( 0 2 )
+u ( 2 5 )
4. 3 Si m u l a t i o n r e s u l t
T h e s i m u l a t i o n c o n d i t i o n i s t h e s a m e t o T a b . 2 . H o w -
e v e r Q( x 1 ) a n d R( x 1 ) w e r e n e w l y s e t a s s h o w n i n T a b . 3 .
T a b l e 3 Si m u l a t i o n c o n d i t i o n
Q( x l ) d i a g ( l . 0 ,
0 . 1 )
R( x i ) 1 . 0
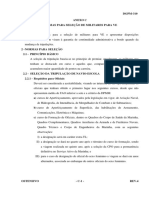
It c a n b e r e a d f r o m Fi g . 8 a n d Fi g . 1 0 t h a t t h e a c t u a l
m o d e l f o l l o w s t h e r e f e r e n c e m o d e l . An d i t c a n b e r e a d
f r o m Fi g . l I t h a t L( 0 2 ) a ppr o a c h e s 0 .
Fu r t h e r m o r e , i t c a n b e r e a d f r o m Fi g . 7 t h a t t h e a n g l e o f
t h e b a s e l i n k h a s c h a n g e d w i t h i n t h e c o n s t a n t r a n g e a f t e r
3 [ s ] . T h a t i s s h o w n t h e s t a b i l i z a t i o n o f t h e b a s e l i n k i s
s u c c e e d e d . T h e r e f o r e , t h e pr o po s e d m e t h o d e n a b l e d t h e
r o t a t i o n c o n t r o l a n d t h e s t a b i l i z a t i o n o f t h e b a s e l i n k a t
t h e s a m e t i m e .
4
t h i
3 t h 2
2
a )
-2
-3
-4
-5
0 1 2 3 4 5 6 7 8 9 1 0
t i m e r s ]
Fi g . 7 a n g l e
2 3 8 4
2 5
2 0
1 5 -
CZ 1
0
* O 5
0
: 3 -5
U
-1 0
-1 5
0 )
-2 0
0 1 2 3 4 5 6 7
t i m e [ s l
d t h 1
d t h 2
d t h r
8 9
5 . CO N CLU SIO N
T h e c o n t r o l l e r b a s e d o n t h e a n g l e o f t h e pe n d u l u m w a s
d e s i g n e d s u c c e s s f u l l y . T h e pe n d u l u m w a s a b l e t o f o l l o w
t o t h e r e f e r e n c e m o d e l w i t h t h e pr o po s e d c o n t r o l m e t h o d ,
a n d t h e e r r o r o f t h e a n g u l a r v e l o c i t y b e t w e e n t h e a c t u a l
a n d t h e r e f e r e n c e a ppr o a c h e d t o 0 . T h e s t a b i l i z a t i o n o f
t h e b a s e l i n k w a s s u c c e e d e d . An d t h e m e t h o d a c c o m -
pl i s h e d t h e r o t a t i o n c o n t r o l a n d t h e s t a b i l i z a t i o n o f t h e
b a s e l i n k a t t h e s a m e m o m e n t .
1 0
Fi g . 8 a n g u l a r v e l o c i t y
6
u
4
2
C. _
-2
-4
-6
0 1 2 3 4 5
t i m e [ s l
6 7 8 9 1 0
Fi g . 9 i n pu t
1 8
1 6
1 4
1 2
-F
1 0
o 6
4
0 1 2 3 4 5
t i m e f s l
e r r o r _ o f _ d t h
6 7 8 9 1 0
Fi g . 1 0 e r r o r o f 0 2
[ Ly a pn o v f u n c t i o n ]
1 0
REFEREN CES
[ 1 ] M . Iw a s h i r o , K . Fu r u t a , K . J . As t r o m . " En e r g y B a s e d
Co n t r o l o f P e n d u l u m " . IEEE T r a n s . o n AC pp. 7 1 5 -
7 2 0 , 1 9 9 6 .
[ 2 ] M . Y a m a k i t a , M . Iw a s h i r o , Y . Su g a h a r a , K . Fu r u t a .
" Ro b u s t s w i n g u p c o n t r o l o f d o u b l e pe n d u l u m " . ACC
pp. 2 9 0 -2 9 5 , 1 9 9 5 .
[ 3 ] Y . H u a n g , M . W. H . Lu . " N o n l i n e a r O pt i m a l Co n -
t r o l : Al t a e r n a t i v e s t o H a m i l t o n -J a c o b i Eq u a t i o n " .
P r o c e e d i n g s o f t h e 3 5 t h IEEE Co n f e r e n c e o n D e c i -
s i o n a n d Co n t r o l . pp. 3 9 42 -3 9 47 , 1 9 9 6 .
[ 4] K . J . As t r o m , K . Fu r u t a . " Sw i n g i n g u p a pe n d u l u m
b y e n e r g y c o n t r o l " . Au t o m a t i c a pp. 2 8 5 -2 8 7 , 2 0 0 0 .
[ 5 ] T . K o m i n e , M . Iw a s e , S. Su z u k i , K . Fu r u t a . " Ro t a -
t i o n a l c o n t r o l o f d o u b l e pe n d u l u m " . 3 r d IFAC Sy m -
po s i u m o n M e c h a t r o n i c Sy s t e m s pp. 3 3 1 -3 3 6 , 2 0 0 4.
[ 6 ] K . Fu r u t a , K . K o m i y a . " D e s i g n o f M o d e l -Fo l l o w i n g
Se r v o Co n t r o l l e r " . IEEE T r a n s . o n AC, V O L. AC-2 7 ,
N O . 3 . pp. 7 2 5 -7 2 7 , 1 9 8 2 .
[ 7 ] S. T e r a s h i m a , M . Iw a s e , K . Fu r u t a , S. Su z u k i , S.
H a t a k e y a m a . " A D e s i g n o f Se r v o Co n t r o l l e r f o r N o n -
l i n e a r Sy s t e m s U s i n g St a t e D e pe n d e n t Ri c c a t i Eq u a -
t i o n " . P r o c e e d i n g s o f t h e 42 n d IEEE Co n f e r e n c e o n
D e c i s i o n a n d Co n t r o l . pp. 3 8 6 4-3 8 6 9 , 2 0 0 3 .
[ 8 ] Ri c h a r d A. H u l l , J a m e s R. Cl o u t i e r , Cu r t i s P .
M r a c e k , D o n a l d T . St a n s b e r y . " St a t e -D e pe n d e n t Ri c -
c a t i Eq u a t i o n So l u t i o n o f t h e T o y N o n l i n e a r O pt i -
m a l Co n t r o l P r o b l e m " . P r o c e e d i n g s o f t h e Am e r i c a n
Co n t r o l Co n f e r e n c e . pp. 1 6 5 8 -1 6 6 2 , 1 9 9 8 .
[ 9 ] J a m e s R. Cl o u t i e r . . " St a t e -D e pe n d e n t Ri c c a t i Eq u a -
t i o n T e c h n i q u e s : An O v e r v i e w " . P r o c e e d i n g s o f t h e
Am e r i c a n Co n t r o l Co n f e r e n c e . pp. 9 3 2 -9 3 6 , 1 9 9 7 .
8
6
4
2
2 4 6 8 1 0
t i m e f s l
Fi g . 1 1 V ( 0 2 )
c Z J
2 3 8 5
Você também pode gostar
- Guia Do Aluno COMANF 2012Documento28 páginasGuia Do Aluno COMANF 2012CavaleirodeAcoAinda não há avaliações
- C 7-10 Companhia de Fuzileiros PDFDocumento328 páginasC 7-10 Companhia de Fuzileiros PDFGlalber Macedo100% (1)
- MB 02 PM Manual de Bombeiros Comunicações OperacionaisDocumento22 páginasMB 02 PM Manual de Bombeiros Comunicações OperacionaisgestorcocbAinda não há avaliações
- Tabela Mestra 13OUTDocumento15 páginasTabela Mestra 13OUTRenanFerreiraAinda não há avaliações
- Teste Ed. Lit 6º ULISSESDocumento9 páginasTeste Ed. Lit 6º ULISSESAna RochaAinda não há avaliações
- 240y Buster s4 (Pangyalife)Documento25 páginas240y Buster s4 (Pangyalife)NaulërAinda não há avaliações
- 04 Rio-Mar - MadeiraDocumento573 páginas04 Rio-Mar - Madeiragil81640Ainda não há avaliações
- Portaria n-CCB-043 e 044 800 23Documento114 páginasPortaria n-CCB-043 e 044 800 23ljAinda não há avaliações
- Estatuto To Fabiano FernandesDocumento119 páginasEstatuto To Fabiano Fernandesalberto_lima_sobralAinda não há avaliações
- PMPE EditalDocumento33 páginasPMPE EditalEstevãoBezerraAinda não há avaliações
- Atividade Produção Textual ArgumentaçãoDocumento7 páginasAtividade Produção Textual ArgumentaçãoJéssica Esgoti UlianaAinda não há avaliações
- Decadência Do Estado Novo - FichamentoDocumento5 páginasDecadência Do Estado Novo - Fichamentojorge luizAinda não há avaliações
- Exame de Admissão Ao Curso Especial de Habilitação - 230513 - 114156Documento19 páginasExame de Admissão Ao Curso Especial de Habilitação - 230513 - 114156LukasVictorAinda não há avaliações
- Dec 7766, RPP e Rppmus 14 02 12Documento25 páginasDec 7766, RPP e Rppmus 14 02 12helio2250% (2)
- IT-09-2019 - Compartimentação Horizontal e Compartimentação Vertical PDFDocumento18 páginasIT-09-2019 - Compartimentação Horizontal e Compartimentação Vertical PDFriqtorresAinda não há avaliações
- Da Defesa Do Estado e Das Instituições DemocráticasDocumento10 páginasDa Defesa Do Estado e Das Instituições DemocráticasLuiza Barros MeloAinda não há avaliações
- ?? Jornal de Angola - 04.02.2021Documento32 páginas?? Jornal de Angola - 04.02.2021nuncafalhaAinda não há avaliações
- 14-AnC. REV.4Documento7 páginas14-AnC. REV.4Daniel Brito GarcezAinda não há avaliações
- IT 01 2019 Procedimentos AdministrativosDocumento67 páginasIT 01 2019 Procedimentos Administrativosrodrigo morenoAinda não há avaliações
- 3° - Modelo de Ata de AssembleiaDocumento3 páginas3° - Modelo de Ata de AssembleiaMariah MarchiniAinda não há avaliações
- Archivo de Marinha e Ultramar, Catalogo de Mappas, Plantas, Desenhos, Gravuras e Aguarellas PDFDocumento56 páginasArchivo de Marinha e Ultramar, Catalogo de Mappas, Plantas, Desenhos, Gravuras e Aguarellas PDFDOMAinda não há avaliações
- OS Anarquistas Na Revolução Mexicana PDFDocumento20 páginasOS Anarquistas Na Revolução Mexicana PDFAnarcotecaAinda não há avaliações
- Penal e Processo Penal Militar PDFDocumento15 páginasPenal e Processo Penal Militar PDFRuanAinda não há avaliações
- Edital PMDocumento159 páginasEdital PMVerneck SilvaAinda não há avaliações
- R-2 - Regulamento de Continências, Honras, Sinais de Respeito e Cerimonial MilitarDocumento50 páginasR-2 - Regulamento de Continências, Honras, Sinais de Respeito e Cerimonial MilitarMajMaximianoAinda não há avaliações
- Peacekeeping - Actores, Estratégias e DinâmicasDocumento160 páginasPeacekeeping - Actores, Estratégias e Dinâmicasana__rioAinda não há avaliações
- Relatório Sobre A Morte Do Ex-Presidente João GoulartDocumento216 páginasRelatório Sobre A Morte Do Ex-Presidente João Goulartramonsouza2014Ainda não há avaliações
- A Ideia de Europa em Aristide Briand o Memorando BriandDocumento12 páginasA Ideia de Europa em Aristide Briand o Memorando BriandAna PiscarretaAinda não há avaliações
- GutsDocumento1 páginaGutsMarcus MauroAinda não há avaliações
- NPCP-RJ - Capítulo 3Documento21 páginasNPCP-RJ - Capítulo 3Renato FonsecaAinda não há avaliações