Escolar Documentos
Profissional Documentos
Cultura Documentos
Cap 03 Critérios de Qualidade de Sistemas
Enviado por
igor_fatec0 notas0% acharam este documento útil (0 voto)
6 visualizações36 páginasteoria de malhas de controle
Direitos autorais
© © All Rights Reserved
Formatos disponíveis
PDF ou leia online no Scribd
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoteoria de malhas de controle
Direitos autorais:
© All Rights Reserved
Formatos disponíveis
Baixe no formato PDF ou leia online no Scribd
0 notas0% acharam este documento útil (0 voto)
6 visualizações36 páginasCap 03 Critérios de Qualidade de Sistemas
Enviado por
igor_fatecteoria de malhas de controle
Direitos autorais:
© All Rights Reserved
Formatos disponíveis
Baixe no formato PDF ou leia online no Scribd
Você está na página 1de 36
CAP{TULO 3
CRITERIOS DE QUALIDADE DE SISTEMAS
3.1 Entradas Normalizadas
© intuito deste captulo é a andlise da qualidade de fun
cionamento dos sistemas, a partir das suas respectivas Fungées
de Transferéncia.
Até agora, nos preocupamos em calcular as Fungdes de
Transferéncia de diversos blocos, que podem constituir um siste
ma e determinar a FungSo de Transferéncia Global, que representa
© sistema como um todo.
De posse da Fungdo de Transferéncia de um sistema, pod
mos analisar o comportamento deste sistema, porque esta Fungao
de Transferéncia contém todos os parametros que definem o modo
de operacgao do mesmo.
Quando desejamos analisar a qualidade de um sistema,
aplicamos certos sinais na sua entrada e observamos 0 comporta
mento do sinal na sua saida.
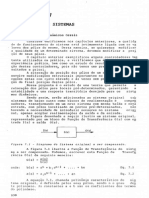
Conforme vimos_anteriormente, se aplicarmos na entrada
de um sistema com Fungdo de Transferéncia F(s) uma entrada R(s),
teremos na sua saida um sinal C(s), que pode ser calculado pela
seguinte expressdo :
C(s) = R(s) . F(s)
Desta forma, para obter o valor da saida C(s) ao aplicar
mos uma entrada R(s), basta multiplicar o valor desta — entrada
R(s) (entrada no dominio transformado de Laplace) pela Fungao
de Transferéncia que j4 sabemos calcular.
© leitor deve perceber que necessitamos da entrada no
dominio de Laplace e estamos acostumados com sinais no dominio
do tempo.
Sendo assim, serao dados a seguir, diversos sinais pa
drées utilizados na entrada de sistemas e suas respectivas trans
formadas. Novamente, nado serdo comprovadas as transformadas uti
lizadas, por se tratar de um curso prdtico.
As entradas descritas a seguir sao chamadas Entradas Nor
malizadas e servem de ferramenta no estudo da qualidade de sis
temas.
a) Entrada Impulsiva
A entrada impulsiva é definida de modo que num certo ins
tante o sinal de entrada r(t) assume um valor elevado, tenden
do a infinito e permanece nesta situagao em um intervalo de tem
po,muito pequeno, tendendo a zero.
© grafico a seguir, ilustra a entrada impulsiva no domi
nio do tempo. aa
t
Figura 3.1 - Grafico da entrada impulsiva.
40
Conforme observamos na figura 3.1, 0 sinal r(t) aplica
do possui valor diferente de zero apenas no instante t = 0, e es
te valor, representado por uma flechavertical, tende a infinito.
Este tipo de entrada chamada r(t) = 6(t) é impossivel de se re
produzir fielmente na prética. Podemos apenas imaginar uma liga
go répida de uma certa entrada de valor elevado, mas nao o acio
namento instanténeo de um valor infinito.
De qualquer maneira, a transformada de Laplace deste ti
po de sinal é dada pela seguinte expressao:
R(s) = 1
Se fizermos um grdéfico deste sinal de entrada R(s) no
dominio transformado, observaremos que o sinal é uma constante
com valor unitdrio. Fazendo um paralelo da varidével s coma va
ridvel frequéncia, observamos que uma entrada impulsiva é cong
tituida por uma somatéria de sendides de todas as frequéncias e¢
valores iguais de amplitude. Observa-se entao o porque da impos
sibilidade prética de se implementar este tipo de sinal.
b) Entrada Degrau
A entrada degrau é a mais utilizada no estudo de qualida
de de sistemas, por mostrar uma boa visdo transitéria do siste
ma e ser facil de se implementar na prdtica. Esta entrada assume
o valor 0 até um instante t inicial e passa a assumir um valor 1
apos este instante, continuamente.
© gréfico desenhado a seguir, ilustra a forma de onda da
entrada degrau no dominio do tempo.
F(t)
Figura 3.2 - Grafico da entrada degrau.
Podemos observar com o auxilio da figura 3.2, que a en
trada x(t) assume valor nulo até o intervalo t=0, passando ins
tantaneamente para o valor 1 neste instante e assim permanece
constantemente.
Com este tipo de entrada chamada r(t) = H(t), iremos es
tudar a qualidade dos sitemas, pois através desta entrada pode
mos analisar o comportamento da saida de um sistema desacionado
que num certo instante recebe um comando de entrada e ird respon
der a este comando.
Observaremos entdo, que o sistema ao responder ao comando
de entrada, passard por um periodo de tempo chamado transitério
e ird se estabilizar numa outra situagdo chamada de regime perma
nente. Através da andlise do funcionamento do sistema no regime
transitério e no permanente, podemos concluir sobre a qualidade
do mesmo.
A transformada de Laplace deste sinal r(t) = H(t) é dada
pela seguinte equacao
R(s) = =e
s
AL
Este resultado pode facilmente ser calculado se lembrar
mos que a entrada degrau é a integral da entrada impulsiva, e pe
la regra de transformada sabemos que a transformada da integral
de uma fungao vale 1/s, multiplicado pela transformada da funcao.
Jd vimos anteriormente, que a transformada de uma con:
tante multiplicada por uma fungdéo é a constante multiplicada pe
la transformada da funcao, sendo assim, se quisermos calcular a
transformada R(s) de uma entrada degrau com amplitude K constan
te, concluiremos:
R(s)
Novamente, é impossivel de se realizar este sinal na pré
tica porque nao conseguimos uma variagdo instantanea de um sinal
de um certo valor para outro. De qualquer forma, é€ importante iz
plementar este sinal para podermos comprovar na prdtica resulta
dos tedricos obtidos. Isto serd realizado, gerando-se um sinal
com tempo de transigao bem pequeno em relagao @ velocidade do
sistema que estd sendo estudado.
© leitor observaréd futuramente, que sendo o tempo de
transig&o do sinal de entrada muito pequeno em relagao ao tempe
de resposta do sistema, poderemos desprezar este tempo eo s
tema opera como se a entrada fosse realmente um sinal degrau.
¢) Entrada Rampa
A entrada rampa representa a integral da entrada degrau
e pode ser observada no grafico a seguir:
ett)
Figura 3.3 - Gréfico da entrada rampa
Conforme podemos observar na figura 3.3, a entrada ramps
assume o valor nulo até o instante t 0 e seu valor cresce pro
porcionalmente com o tempo. Esta entrada, que pode ser represen
tada no dominio do tempo pela expressao r(t) = t . H(t), repre
senta a integral da entrada degraue sua transformada de Laplace
pode ser determinada com o auxilio das regras de transformagao
resultando: ji
eg see
s
d) Entrada Parabdlica
A entrada parabélica a menos de uma constante, represen
ta a integral da entrada rampa, podendo ser observada no grafico
a seguir:
42
ru)
Figura 3.4 - Grafico da entrada parabélica.
© gréfico da figura 3.4, representa a equagdo da entrada
no dominio do tempo r(t) = t? H(t). Esta entrada é 2 vezes a
integral da entrada rampa. Pesta maneira, sua transformada pode
ser Calculada com o auxilio das regras de transformacdo, resul
tando:
R(s) = 2)
s
e) Entrada Senoidal
A entrada senoidal serve para estudar o comportamento dos
sistemas, quando aplicamos num certo instante uma entrada senoi
dal. 0 grdfico desenhado a seguir, ilustra a entrada senoidal no
dominio do tempo.
Figura 3.5 - Grafico da entrada senoidal
Através da figura 3.5, observamos que a entrada senoidal
6 nula até o instante t = 0 e um seno de frequéncia w apés este
instante. A equagdo que representa esta entrada, r(t)=H(t).senwt, im
poem o valor nulo antes do tempo t = Q, que é a propria caracte
ristica da entrada degrau H(t).
Calculando-se a transformada de Laplace dessa entrada,
resulta:
R(s) = =H
stew
£ importante ressaltar que 0 estudo do comportamento da
resposte do sistema a esta entrada, engloba ndo so o regime per
manente, apds'o sistema ter se estabilizado como seno, mas tam
bém o transitério, logo apdés o instante t = 0,
Esta andlise é mais completa que a andlise de resposta
senoidal feita por estudo de impedancias, que apenas conclui so
bre a resposta em regime permanente.
Para estudar a qualidade dos sistemas iremos aplicar a
entrada _degrau e observar o comportamento da saida. 0 problema
6 que nao conseguimos entender o comportamento da saida, sendo
sua expresso dada no dominio de Laplace C(s).
Para entender o funcionamento do sistema, precisamos uti
lizar a antitrensformada de Laplace e calcular c(t), pois no do
minio do tempo conseguimos entender o comportamento da saida. Des
ta forma, nos préximos subcapitulos, iremos estudar a qualidade
de sistemas e calcularemos c(t).
43
Neste momento, o leitor pode estar confuso para entender
a vantagem de utilizar a transformada de Laplace, sendo que ne
cessitamos da resposta do sistema no dominio do tempo.
Se observarmos atentamente, precisamos equacionar a res
posta c(t) dada uma entrada r(t) e assim estaremos aptos a enten
der o funcionamento do sistema.
© método proposto para se obter a saida c(t) é 0 seguin
te
a) Calcula-se a Fungao de Transferéncia do sistema, obtendo-se
F(s);
b) Calcula-se a Transformada de Laplace da entrada r(t), | obten
do-se R(s);
¢) A expressdo do sinal de saida no dominio transformado vale
C(s) = R(s) . F(s)
d) Antitransforma-se em Laplace a saida C(s), obtendo-se a sai
da c(t).
© leitor pode pensar que o método é um pouco arcaico, mas
na verdade néo existe outra maneira para se obter a expressao da
saida c(t), operando apenas no dominio do tempo. Jé foi observa
do inclusive, que o célculo da fung3o de transferéncia nao é pos
sivel no dominio do_tempo por causa das derivadas e integrais.
Apesar de nao haver processo direto para célculo da Fun
gao de Transferéncia no dominio do tempo f(t), poderiamos cal
cular esta Fungaéo através da antitransformada da Fungo de ‘Trans
feréncia F(s), que é a propria resposta impulsiva do sistema.
Desta forma, apesar de ter de qualquer forma utilizado a Trans
formada de Laplace, teriamos o seguinte sistema:
ey) a e(t)
Dada a entrada r(t) e calculada a Fungdo de Transferén
cia f(t), a expresso da saida c(t) nao 6 uma simples multiplica
g8o da entrada r(t) pela funcdo £(t
Na verdade, a saida c(t) é uma integral de convolug&o das
fungoés r(t) e f(t), representada pela seguinte equacao:
400
x(a). £(t = 2) aa
c(t)
0
Fica evidente a vantagem de utilizar o dominio transfor
mado de Laplace, mesmo porque o leitor observard que nao serd
necessario calcular sempre a antitransformada da fungdo C(s) pa
ra obter c(t), serd calculada apenas uma vez e tiraremos algumas
conclusées com regras que poderao ser utilizadas no projeto de
sistemas.
Exercicios propostos
Ex. 3-1 Calcular a expressao da saida C(s) num sistema que foi
aplicado uma entrada degrau de amplitude 5, ou —seja
x(t) = 5 . H(t), sabendo que sua Fungdo de Transferéncia
44
vale:
F(s) = —S +2 _
s? + 12s + 35
Ex. 3.2 Calcular a Fungado de Transferéncia do sistema com reali
mentagao desenhado a seguir, e determinar o valor da sai
da C(s), sabendo que no sistema foi aplicada uma entra
da degrau de amplitude 7 (r(t) = 7 . H(t)).
G(s) = ——10_
(s+1)(s+2) Ris) (s Gis)
Hi(s)= oF Hels) Le
Hj(s) = 8/2 Hy) be
3.2 Qualidade de Sistemas de 12 Ordem
Conforme temos estudado, o primeiro passo na andlise de
um sistema de controle é a definigdo de um_modelo matemético
© que foi realizado com o auxilio das Fungées de Transferéncia.
No projeto e andlise do desempenho de sistemas de con
trole, devemos adotar uma base de comparagao entre varios siste
mas. Esta base pode ser obtida, especificando-se sinais particu
lares de teste de entrada, e comparando-se as respostas dos sis
temas a estes sinais. Os sinais de teste de entrada, | comumente
utilizados, sao as entradas normalizadas mostradas anteriormente.
Estudaremos a qualidade de sistemas através da resposta
a entrada degrau, pois tanto andlises tedricas mateméticas como
comprovagées prdticas podem ser feitas com facilidade, pois, es
te sinal é uma fungdo relativamente simples do tempo.
Por saber que os sistemas de 1® ordem possuem uma manei
re qualitativa tmica de resposta 4 entrada degrau, estudaremos
um sistepa, de 1® ordem genérico representado pela figura abaixo:
Figura 3.6 - Sistema de 1*# ordem genérico.
Podemos observar através da figura 3,6, que o sistema pos
sui uma entrada R(s), uma saida que é a varidvel controlada C(s),
um sinal de erro na saida do detetor de erro E(s), uma Fung&o de
Transferéncia na malha direta K/(sta)e realimentagao unitdria.
Calculando a Fungdo de Transferéncia do sistema, teremos
C{s) = E(s) . EK C(s) = (R(s) - C(s)) . K_
sta sta
C(s) + C(s) . xe
sta
K
c(s) (1+ = R(s) . K F(s) = C(s) - _sta_
sta sta R(s) oy, K
Sta
F(s) = —_k__
stat+k Eq. 3.1
Definindo b = a + K na equag3o 3.1, teremos:
x
F(s) = 35 Eq. 3.2
Podemos representar o sistema de uma maneira — simplifi
cada, através da figura abaixo:
| |
Rls} K Sis)
x a |—_____*
stb
Figura 3.7 - Representaga4o do sistema de 1* ordem genérico
A figura 3.7 ilustra a representacao simplificada de um
sistema genérico de 1@ ordem, que desejamos calcular a qualidade.
Este sistema possui um nico pélo que pode ser obtido
igualando-se o denominador da Fungdo de Transferéncia, © equagao
3.2 a zero, resultando: s = -b
Aplicando-se ao sistema uma entrada degrau R(s) = 1/s,
teremos na saida:
c(s) = R(s) . F(s)
K
c(s) = —K_ Eq. 3.3
(8) = Stexpy i
Para escrever a expressdo da saida no dominio do tempo,
precisamos escrever a equagao 3.3, separando em dois termos, da
seguinte maneira:
A B Ec ie
cls) = Ae fuer
(s) = 5+ esp)
Igualando-se as expressdes 3.3 e 3.4, teremos:
B
K AaB Eq. 3.5
s(s+b) 8 (s+b)
w
Tirando-se o minimo maltiplo comum de 22 membro da equa
Go 3.5, obtemos:
K A(stb) + Bs
s(s+b) s(s+b)
K Ags + Bs + Ab Eq. 3.6
s(stb) s(stb)
Da equagdo 3.6 podemos escrever um sistema com 2 equa
de Ae B, da segui
gées e 2 incognitas para calcular os valore:
te form
46
As + Bs = 0
Ab = K
Calculando este sistema de equagdes descrito anteriormen
te, concluiremos que
K K
a-f Be-&
Substituindo estes valores de A e B na equag&o 3.4, obtemos:
c(s) = K - _K__ : Pqeae7
bs bls) f
© primeiro termo do 2° membro da equag3o 3.7 representa
um degrau com amplitude K/b e o 2° termo, um degrau amortecido
exponencialmente. Desta maneira, utilizando a antitrensformada de
Laplace, concluiremos sobre o valor da saida c(t), resultando:
c(t) =K-K.¢@ “ht (t 2 0) Eq. 3.8
bb
Por dificuldades de ordem matemética ¢ por se tratar de
um curso prético, ndo serd demonstrado este cdlculo. A figura
dada a seguir ilustra a saida referente a equagao 3.8 no domi
nio do tempo, que é a resposta tipica a entrada degrau de um
sistema de 1# ordem.
Figura 3.8 - Resposta tipica % entrada degrau de sistemas de
ordem.
A figura 3.8, ilustrd o gréfico da equagdo 3.8 que é a
resposta tipica de um sistema de 1? ordem. Podemos observar que
ao aplicar uma entrada degrau aos sistemas de 1@ ordem, a respos
ta 6 uma exponencial saindo do zero, tendendo a um valor constan
te.
Observamos que a constante de tempo desta resposta ex
nencial depende do pdlo b. 0 valor que o sistema estaciona no
regime permanente K/b 6 chamado de valor de regime (Creg).
Para que o sistema seja totalmente controlado, necessita
mos que o valor de regime seja o mesmo da entrada (em sistemas
com realimentagdo unitdria). A diferenga entre o valor de regime
e 0 valor de entrada é dito erro de regime (Ereg).
Para analisar o tempo de resposta do sistema, definimos
como tempo de subida do sistema (ts), como sendo o tempo gasto
para o sistema transitar entre 10% e 90% do valor de regime. Cha
mamos ainda de tempo de acomodagdo (ta), o tempo gasto na tran
sigéo de 0 para 95% do valor de regime
Desta forma, podemos desenhar um novo gréfico, definin
do os parametros necessérios no estudo de qualidade dos siste
mas de 12 ordem.
47
oucres |
ts 7
. ¥6
Figura 3.9 - Parametros de estudo de qualidade de sistemas de
1# ordem.
A figura 3.9 ilustra os paraémetros relevantes no estudo
da qualidade de sistemas de 1# ordem. A seguir, seréo calculados
e definidos estes pardmetros e verificaremos que os valores de
pendem de pardmetros embutidos na Fungao de Transferéncia.
a) Erro de Regime Permanente (Ereg)
Definimos como erro de regime permanente (Ereg), o limi
te do sinal e(t) na saida do bloco detector de erro quando t
tende a infinito, ou seja, a subtracgdo entre o sinal na entrada
positiva do bloco detector de erro e a entrada negativa apés 0
sistema ter estabilizado.
No sistema estudado, a realimentagao é unitéria, | sendo
o sinal na entrada negativa do detector de erro o préprio sinal
da saida do sistema, e podemos escrever a seguinte equagdo:
Ereg = lim (r(t) - c(t))
te
Ereg = lim r(t) - lim c(t) Eq. 3.9
tte ce
No estudo da qualidade de sistemas, utilizamos entrada
degrau, resultando:
lim x(t) = 1 Eq. 3.10
tee
Aplicando a equagSo 3.10 na equagao 3.9, obtemos:
Ereg = 1 - lim c(t) Eq. 3.11
toe
Chamamos de limite da saida c(t) quando t tende a infini
to como sendo o valor da safida em regime permanente. Calculando
este valor, obtemos:
i ke ope
Creg = lim c(t) = lim (K-K e )
toe tee \b PB
Creg = a Eq. 3.12
Observamos ent&o através da equacgao 3.12, que_o valor da
saida apés a_estabilizacao do sistema vale K/b, que séo parame
tros da Fungao de Transferéncia do sistema.
Aplicando-se a equagéo 3.12 na equagao-3.11, obtemos oo
valor do erro de regime permanente:
Ereg = 1 - Eq. 3.13
Através da equagao 3.13, podemos calcular o erro do_ sis
tema, utilizando os parametros K e b da Fungdo de Transferéncia
do Sistema.
Uma outra maneira mais rapida de calcular o erro de regi
me permanente ¢ obtida através de uma propriedade da Transforma
da de Laplace, que resulta:
Ereg = lim s . E(s)
S40
Nesta equagao, basta calcular o valor de E(s) de um sis
tema qualquer no dominio transformado e calcular o limite
No projeto de um sistema de controle, desejamos que o er
ro de regime seja o mais préximo possivel de zero.
b) Tempo de Subida (ts)
O tempo de subida é definido como sendo o tempo gasto
para a saida do sistema passar do valor 0,2. Creg pare 0,9.Creg-
Este valor estd relacionado com o valor do pélo do sistema que
define a constante de temo da resposta exponencial.
Para calcular o valor do tempo de subida, devemos resol.
ver o sistema de duas equacdes e duas incdégnitas, descrito a
seguir: Kok uebtt
7 =-K-KEe
0,1 Creg = EF - E
0,9 ¢ =K_K ¢-bt2
be
Sabendo-se que o valor de Creg é k/b, o sistema pode ser
simplificado, resultando
0,1 = 1 - e~btr Eq. 3.14
0,9 = 1 - e~bt2 Eq. 3.15
Da equagdo 3.14 podemos calcular o valor de ti, obtendo:
-0,9 = -e7bt1 e7btl = 0,9 in e~>t] = In 0,9
Eq. 3.16
Desenvolvendo a equago 3.15, podemos calcular o valor
do tempo t , resultando:
-0,1 = -e7bt2 ebt2 = 0,1 In e~bt2 = in 0,
ee t2 = 238 Eq. 3.17
Sabendo-se que o tempo de subida ts é a subtracgao do
tempo tz pelo tempo ti, podemos calcular ts, resultand
eters ease end ts = 2.2 Eq. 3.18
’ b b
Como o valor do pélo do sistema calculado anteriormente
é -b, podemos observar que o tempo de subida, dado pela equa.
gao 3.18, & inversamente proporcional ao valor do pélo, sendo a
constante de proporcionalidade o valor 2,2. Assim sendo, para
sabermos o tempo de subida de um sistema de 1# crdem, basta cal
cularmos o valor do polo deste sistema.
49
c) Tempo de Acomodagao (ta)
© tempo de acomodagao de um sistema de 1 ordem é o tem
po gasto para a saida do sistema partir do zero e chegar a 95%
do valor de regime. Verificaremso novamente que este valor depen
de do pélo do sistema.
Para calcular este tempo, basta saber 0 valor do tempo
ta que satisfaz a seguinte igualdade:
K _K -bta
0,95 Creg =D - & Eq. 3.19
Novamente, utilizando-se Creg = K na equagéo 3.19 e calculen
do o valor de ta, teremos:
09s kK=K-K ‘bta 0,95 = 1 - e-bta
bbb
-0,05 = -e-bta e-bta = 0,05
ine7bta = in 0,05 bta = 3 ta aa Eq. 3.20
Observamos entdo que tempo de acomodagao, dado pela equa
go 3.20,é inversamente proporcional 80 valor do polo, sendo &
constante de proporcionalidade o valor 3.
Desta forma, através do cdlculo do tempo de subida e do
tempo de acomodacdo percebemos que o tempo de resposta (veloci
dade) do sistema depende do valor do pélo do mesmo
Um sistema de controle de 1@ ordem, que possui um valor
elevado do pélo, possui pequeno tempo de resposta, evidenciando
um valor elevado de velocidade, enquanto que um sistema com polo
de valor pequeno possui um tempo elevado de resposta, 0 que oca
siona uma velocidade lenta.
A seguir, serd mostrado um exemplo de cdlculo de qualida
de de sistema de 12 ordem.
Exemplo 3.1 Calcular o erro de regime permanente, o tempo de-subi
da e o tempo de acomodagdo do sistema de controle de
18 ordem, cujo diagrama em blocos é desenhado a se
guir. Desenhar a resposta degrau no dominio do tempo
anotando os valores calculados
Ris) Els) ie cus)
ste
Primeiramente, devemos calcular a Fungéo de Transferén
cia do sistema, verificar se o sistema é de 1# ordeme calcular
© valor do polo da seguinte forma:
c(s) = E(s) . a4 E(s) = R(s) - C(s)
c{s) (R(s) - C(s)) . 1O_ c(sy = R(s)-10 _ C(s).10
s+2 st2 s#2
50
c One 10
oat ee cts). (3 s+3 } R(s). =
c a1 a
r(s) = € F(s) = 22-— Fis)
Da Fungao de Transferencia de equacao anterior, observa
mos que o sistema é de 1# ordeme o valor do pélo é s = -12.
a) Cdlculo do Erro de Regime (Ereg)
0 valor do Ereg 6 definido pela seguinte equaga
Ereg = lim s . E(s)
570
Calculando o valor de E(s), obtemos:
E(s) = R(s) - C(s)
Sabendo que a entrada utilizada é a entrada degrau, te
mos: :
Re)
s
A saida do sistema C(s) é dada pela seguinte equagao
7 =i, 10_
c(s) = R(s) . F(s) = Ai S+12
Substituindo-se os valores de R(s) e C(s) na equagdo de
E(s), obtemos:
E(s) =2-2 , 10. E(s) =
ss
a - 10)
s+12
s+12
ob
Aplicando a equagao anterior na equagdo de Ereg, podemos
calcular o erro de regime, resultando:
Ereg = lim s.i (1 - 10.
hades er s s+12
Ereg = lim s+12-10 E; 2. = 0,17
ee eho eerie eal
Expressando 0 erro de regime em porcentagem, obtemos
Ereg = 17%
b) Cdlculo do tempo de subida (ts)
© valor do tempo de subida pode ser calculado pela se.
saints sapeessael
eee a
|pé20|
Sabendo que © pdlo do sistema vale -12 e aplicando este
valor na equagao anterior, obtemos:
2,2
ts = 24 ts = 0,183s
12
51
c) Célculo do tempo de acomodagao (ta)
© valor do tempo de acomodagéo pode ser calculado pela
seguinte expressao: :
ta = —3 ta = 0,25s
Ipdi0]
© leitor_ deve observar que o s nos tempos anteriores sig
nifica segundo nao tendo nada a ver com a varidvel transformada
de Laplace.
a) Gréfico da Resposta Degrau:
0,79
0.75
0.08
025s
Exercicios Propostos
Ex. 3.3: Calcular o erro de regime permanente, o tempo de subida
@ © tempo de acomodagao do sistema de controle desenha-
do abaixo. Desenhar a resposta & excitagao degrau no do
minio do tempo, assinando os valores calculados.
3.3 Qualidade de Sistemas de 2° Ordem
Para se obter um sistema genérico de 2% ordem, a fim de
estudarmos sua qualidade, basta acrescentar no diagrama em blo
cos do sistema de 14 ordem, figura 3.6, um bloco integrador na
saida do detetor de erro. Verificaremos futuramente que este ar
tificio é utilizado para obtermos um controlador integral.
A figura a seguir, ilustra o diagrama em blocos do sis
tema de 2@ ordem a ser estudado.
RG) Etsy 4 K Cts)
Figura 3.10- Diagrama em blocos de um sistema de 2% ordem genérico.
52
Observamos, através da figura 3.10 que o sinal de erro E(s),
antes de ser aplicado no bloco de malha direta K/(sta), passou por
um bloco integrador cuja fungao de Transferéncie vale 1/s.
Calculando a Fungaéo de Transferéncia do sistema, teremos:
C(s) = E(s) . —K— €(s),= (R(s)-C(s))-—K_
s(sta) s(sta)
Ke kee
elec | ete)
cts). (r+ R(s) . —K_
\ s(sta)
cls) kK
F(s) = = a
(9) R(s) eek F(s) s(sta) + K
s(sta
F(s) = ——K____ eq? ae 20
s?+as+K
Através da Fungdo de Transferéncia descrita pela equacao
3.21, podemos representar o sistema por ‘um tinico bloco, como
podemos verificar na figura abaixo:
Ris) K cls)
ae» =“ | ___ *e
tt ost K
Figura 3.11- Representagio do sistema de 2% ordem.
A figura 3.11 ilustra a representacao simplificada de um
sistema de 22 ordem que desejamos calcular a qualidade.
No estudo de sistemas de 2@ ordem, observaremos futura
mente que o sistema pode apresentar uma oscilac3o e para determi
nar o tipo de resposta do sistema, devemos escrever a Fungéo de
Transferéncia da seguinte maneira:
F(s) = ——_wn?______ Eq. 3.22
a s?7 + 2,0. wns + wn
onde: wn € a frequéncia angular de ressonancia nao amortecida
do sistema.
5 €0 fator de amortecimento.
BYP yh
Igualando-se as equacgSes 3.21 e 3.22, podemos calcular
os valores de wn e ¢ da seguinte maneira:
2.¢.wn =a Eq. 3.23
wn? = K Eq. 3.24
Os sistemas de equagdes definidas pelas equagées Same:
e 3.24 nos possibilita o cdlculo de te wn. A resposta transité
ria dos sistemas de 2¢ ordem depende destes valores. Caso O 1, 0s pdlos do sistema so reais e de valores
diferentes, A resposta destes sistemas 6 caracterizada por duas
exponenciais e o sistema é dito sobreamortecido.
53
Se $= 1, os pdlos do sistema sdo reais e iguais, o que
caracteriza o sistema com resposta exponencial e o sistema é di
to criticamente amortecido.
Para = 0 temos o sistema oscilando permanentemente sem
amortecimento.
A figura desenhada a seguir, ilustra a resposta para a
entrada degrau dos sistemas de 2# ordem nos diversos casos des
critos anteriormente.
fer ’
20
EA to
ue f
ie . eee
08 08
“a Phe Xt
12 _—{
0,7. re
rr) <=
oat aa
2 SAN
CAPT
oa
oz
=
Figura 3.12 - Curvas de resposta a entrada degrau unitaria dos
sistemas de 2# ordem.
Através da figura 3.12, observamos que parat= 00 siste
ma oscila permanentemente, para 0< 5 < 10 sistema possui uma
oscilagao amortecida, tendendo ao valor de regime, se t= 1, a
resposta é exponencial e se ¢ > 1, a resposta pode ser represen
tada por uma exponencial porém o sistema é mais lento.
Para estudar a qualidade de resposta dos sistemas de 2°
ordem, devemos novamente analisar o erro de regime e a velocida
de da resposta. =
© erro de regime permanente é calculado da mesma forma
que no sistema de 12 ordem, ou seja, observando-se a figura 3.7
devemos calcular o erro através da seguinte expressa
Ereg = lim s . E(s)
340
© estudo da velocidade de resposta do sistema _ depende
do tipo de resposta, de acordo com o valor de & descrito ante
riormente.
1) Caso sobreamortecido (& > 1)
Jé foi dito que neste caso, os dois pélos do sistema sao
reais negativos de valores distintos. Calculando os valores dos
médulos destes polos, concluimos
(g Aft? 1) wn s,= (6 -\fF - 2") wn
Desta forma, podemos escrever a expressao de saida C(
que a Fungéo de Transferéncia do sistema multiplicada pela entra
da degrau, resultando:
a
cls) =
Dee
OS ee ie ee ee ee
Aplicando @ transformada inversa de Laplace na equaga
3.25, obtemos:
{erst
aon: Scie
ae 2-1 5}
Observamos através da equagao 3.26, que a resposta dos
sistemas de 28 ordem no caso sobreamortecido, 6 composta por 2
exponenciais decrescentes.
Para ¢ consideravelmente maior que 1, verificaremos que
s, € consideravelmente maior que s2 e, portanto, a exponencial
que depende de s; decai mais rapidamente que a exponencial que
depende de s).
Isto ocorre quando o sistema tem pdlos de valores con
sideravelmente diferentes. Nestes casos, podemos desprezar o po
lo s; (de valor maior em médulo) em relagdo a 52 e podemos estu
dar o sistema como se o mesmo fosse de 1 ordem com pélo s2.
Desta forma, podemos considerar o sistema com a seguinte
fungao de transferéncia:
F(s) = —S2— Eq. 3.27
s + 82
onde os, = (¢ -\/t? = T) wn
A andlise do tempo de subida deste tipo de sistema ja foi
estudada anteriormente, resultando:
=s2t
c(t) = 1 . =) (tz0) Eq.
82
eoae 2.2
ts = 2.2 Eq. 3.28
s2 (e-Ve? “Twn
Da mesma maneira, podemos concluir sobre o cdlculo do
tempo de acomodagao através da seguinte equagao:
3 3
eee ee Eq. 3.29
sp (e-Ve- Twn [
Sabemos que ao utilizarmos as equagdes 3.28 e 3.29 esta
mos assumindo um erro, rincipalmente nos casos em que os valo
res dos pélos s1e S27 sao préximos. De qualquer forma, nao hd um
interesse prdtico em definir férmulas mais precisas para o cal
culo de ts e ta, visto que geralmente em sistemas de controle,
desejamos saber apenas a ordem de grandeza dos tempos de respo:
ta.
Com o intuito de enfatizar o cdlculo da qualidade de um
sistema de controle de 2@ ordem com pélos reais e distintos, se
ré resolvido um exemplo a seguir.
Exemplo 3.2Calcular o erro de regime permanente e os tempos de
subida e acomodagao aproximados, do sistema de contro
le dado a seguir. Desenhar a curve de resposta apro
ximada do referido sistema.
sia
Primeiramente, precisamos calcular a Fungdo de Transfe
réncia do sistema da seguinte maneira:
c(s) = E(s) . 20 E(s) = R(s) - C(s)
s?+218
cls) = (R(s) - C(s)) . 20 _
s?+21s BY
cls) = R(s) - —22— - c(s) . 20 __
s?4215 324218
cis) . {1 + 22—) 2 ate) . 22
s?+21s s?+21s
20
F(s) = G(s) = 57#2is Fes) eo
R(s) 1+ — 20 87+215+20
s?+2is
Para calcular os pélos do sis
seguinte sistema de equagoe:
tema, precisamos resolver ©
8, + 8.2 -21 egw 24
aso) = 20 poe! ’
Resolvendo o sistema, teremos: Fa A
Ss, = -20 an oo
S571
Podemos entéo escrever a Fungdo de Transferéncia da se
guinte maneira: .
20 .
F(s) = —-20__
(s+1).(s+20)
a) CAlculo do erro de regime permanente. (Ereg)
0 erro de regime é calcula@o através da seguinte expres
so:
Ereg = lim s . E(s)
so
Calculando o valor de E(s), sabendo que a entrada apli
cada é degrau unitdrio (R(s) = 1/s), obtemos:
E(s) = R(s) - C(s) B(s) = R(s) - R(s) . F(s
fe 20
Glia Gis Gia 2 (ee1)2(a420)
=. . 20 = {s+#1)(s+20) - 20
pele ae | ) = 20
eee ae 5(s#1) .(8#20
56
Podemos ent&o concluir o valor do erro de regime da se
guinte forma:
2 2
E. = lim s . —Si+2ls_ Ereg = lim —S@+#21s. _
ooo 520. 3(s?#21s+20) Se 90 584218420
© erro de regime do sistema é nulo.
b) Cdlculo do tempo de subida (ts)
Para calcular o tempo de subida devemos escolher o pdlo
de menor valor e utilizar a seguinte férmula:
tee eee
|pé10 menor|
Sabendo que o pélo menor vale s2 = -1, podemos concluir
que:
ts = aa ts = 2,2s
© tempo de subida vale aproximadamente 2,2 segundos.
c) Tempo de acomodagéo (ta)
Da mesma forma que no calculo do tempo de subida, preci
samos escolher o menor valor dos pdélos. Devemos utilizar a se
guinte formula:
ta 3
|pé10 menor|
Calculando, obtemos: ta = + ta = 3s
© tempo de acomodagéo é de aproximadamente 3 segundos.
d) Grdfico da resposta transitéria
Sabemos que podemos aproximar a resposta deste tipo de
sistema por uma exponencial, resultando:
2) Caso Criticamente Amortecido (7 = 1)
Neste caso, o sistema possui 2 pdlos de valores idénti
cos cujos modulos podem ser calculados, resultando:
$8) = $2 =-wn
Aplicando ao sistema uma entrada degrau unitadria, con
cluimos que:
wn?
c(s) =§ ——“.—__ Eq. 3.30
s.(stwn)?
57
Aplicando a transformada inversa de Laplace na equagao
3.30, concluimos:
e(t) = 1 - e-wnt (1 + wnt) Eq. 3.31
Através da equagdo 3.31 observamos que a resposte do sis
tema criticamente amortecido, depende de uma exponencial decres
cente multiplicada por uma fung3o (1 + wnt) gue é uma fungao
crescente.
© termo (1 + wnt) dificulta o cdlculo dos tempos de res
posta do sistema, mas sabemos que este termo nao influencia
de maneira muito significativa e podemos aproximar a equagao
3.31, para facilitar os cdélculos, 4 seguinte equagao
c(t) =1 - e wnt Eq. 3.32
Desta maneira, observamos através da equag3o3.32.que-ares
posta pode ser aproximada a um sistema de 1 pélo de modulo wn
© tempo de subida aproximada pode ser calculado pela se
guinte equagao:
ty = 22 Eq. 3.33
wn
© tempo de acomodagado pode ser calculado através da se
guinte equagao:
3
ta = = Eq. 3.34
Novamente, sabemos que estamos assumindo um erro ao’ uti
lizarmos as equagoés 3.33 e 3.34, mas estas equagdes nos dao uma
boa idéia da ordem de grandeza dos tempos de resposta e estes
valores geralmente séo suficientes para o projetista.
A titulo de exemplificagao do cdlculo da qualidade de
sistemas de controle de 2# ordem com polos reais e iguais, serd
calculado com exemplo a seguir
Exemplo 3.3 Dado um sistema de controle de 2@ ordem com pédlos
reais e iguais, através de seu diagrama em blcoos de
senhado abaixo, calcular a qualidade aproximada do
sistema, desenhar a curva aproximada da resposta tran
sitéria.
Ris) cls
Primeiramente, devemos calcular a Fungao de Transferén
cia do sistema da seguinte maneira:
cls) = E(s) . 25 _ E(s) = R(s) - C(s)
aan
cls) = (R(s) - c(s)) . 22
s?410s
58
R(s) . 25 — _ e(s) . —25
c(s)
s?4#10s s?+10s
c(s) . (2 eo R(s) . 25 _
My s?7+10s s?*+10s
25
p(s) = S03). __stsros F(s) = —25
Rie) ej ecoes s?+10s+25
s7+10s
Para calcular os polos do sistema, precisamos resolver o
seguinte sistema de equagoes:
5) + $2 = -10
Sie Be 25)
Resolvendo este sistema, obtemos: $1 = 82 = -
Observamos ent&o que o sistema possui 2 pdlos de valor
-5 e, podemos escrever a Fungo de Transferéncia do sistema da
seguinte maneira:
25
F(s) = ———
no (ero)a
a) Cdlculo do erro de regime permanente (Ereg)
Conforme vimos anteriormente, para calcular o erro de re
gime precisamos calcular o valor de E(s) e determinar o seguinte
limite.
Ereg = lim s . E(s)
340
Calculando o valor de E(s), temos:
E(s) = R(s) - C(s) E(s) = R(s) - R(s) . F(s)
R(s) = 2 E(s) = 2-1, —_25 _
s S 8 ° §74+10s+25
E(s)
0
ob
Te 25 E(s) = 2 s?+l0s |
$?4#108+25 5 \"st+10s+25
Desta forma, podemos concluir o valor do erro da seguinte maneira:
Ereg = lim s .1 _ s?+10s__
370 Ss s?7#108+25
Ereg = lim —S*#l0s
570 5?4108+#25
© erro de regime do sistema é nulo.
b) Célculo do tempo de subida (ts)
Para obter um valor aproximada do tempo de subida, pode
mos desprezar um dos pélos e calculer utilizando o outro através
da seguinte formula:
59
ts = 2.2 2 2:2 ts = 0,445
[pd10] 5
© tempo de subida é da ordem de 0,44 segundos.
c) CAlculo do tempo de acomodagdo (ta)
Da mesma forma que no cdlculo do tempo de subida, pode
mos calcular o valor de ta da seguinte maneira:
ta- 3 23 ta = 0,65
Ipéto] 5 :
O tempo de acomodagdo é da ordem de 0,6 segundos.
Apenas a titulo de verificagdo, calcularemos o valor real
da saida c(t) no instante t = 0,6s. Para que o cdlculo anterior
esteja razodvel, 0 resultado deve ser aproximadamente 0,95.
Devemos entao utilizar a seguinte formula:
e(t) = 1 - e WP (1 + wnt)
Sabemos através do polindmio caracteristico que wn
resultando wn = 5. Aplicando na férmula anterior, temos
e(ta) = 1 - e756 (1 + 5.0.6)
c(ta) = 1 - 4e3 c(ta) = 0,80
Percebemos que o erro da aproximagao resultou numa aco
modagdo determinada em 20% do valor final.
da) Grafico da resposta transitoria
Aproximando a resposta do sistema por uma exponencial e
utilizando os valores aproximados calculados, temos
cit)
0.98
2.9 >
on
3) Caso Subamortecido (0 < ¢ < 1)
No caso subamortecido, o sistema possui 2 pdlos comple
xos conjugados com os seguintes valores:
s = -6 + jwd s = -8- jwa
onde: 4
chamada atenuagdo representa a parte real do pélo
wa
chamada frequéncia natural amortecida representa a
parte imagindria do polo.
Calculando os pélos do sistema no caso subamortecido, ob
temos os valores de 6 e wd, resultando:
Eq. 3.35
Eq. 3.36
60
A figura abaixo representa os pdlos do sistema subamorte
cido nos eixos dos ntimeros complexos.
iw
wd onde: B € o 4ngulo formado en
tre o pédloeo- eixo
real.
6
ind
Figura 3.13 - Gradfico dos pélos do sistema subamortecido.
Aplicando a entrada degrau R(s) = 1/s na entrada do sis
tema cuja Fungéo de Transferéncia é dadd na equagdo 3.22, obte
mos: ae
cls) = ——~2____ Eq. 3.37
s(s*+2cwns+wn?)
Para calcularmos a antitransformada de Laplace e obter
a expressao de c(t), devemos dividir a equagdo 3.37 em varios
termos, da seguinte forma:
c(s) = 2 - s+ 26 wn
S s74#20 wnstwn?
ic i
(9) "3° Tet w)? + wa?” (avewn)? Pwd?
© célculo da antitransformada de Laplace de C(s) resulta:
1 - eS¥nt cos wit - —&__ . o@ wnt
e(t) + sen wat
1-0?
e(t) = 1 - e-$wnt (cos wat + —&— . sen wat) Eq. 3.38
1-G?
© gréfico desenhado a seguir, ilustra a resposta tran
sitéria de um sistema de 2? ordem subamortecido e define os para
metros basicos que definem a qualidade do sistema.
don)
\
Creg
ores +
aulcreg
ta
Figura 3.14 - Resposta tipica a entrada degrau de um sistema de
24 ordem com pélos complexos.
61
A figure 3.14 ilustra os pardmetros relevantes no es
da qualidade de sistemas de 2® ordem com pélos complexos.
© valor do erro de regime 6 calculado através de um 1
te jd descrito anteriormente. Os outros pardmetros sero defi
dos a seguir e serdo dadas férmulas para o cdlculo dos_seus valo
res. Por motivos de ordem pratica, as formulas nao serao dem:
tradas.
a) Sobre-sinal (Ss) OG Y=
© sobre-sinal é definido como sendo a diferenga entre o
valor méximo da saida e o valor de regime permanente, _dividido
pelo valor de regime permanente. 0 scbre-sinal pode ent&o ser
dado em porcentagem. A expressdo a seguir, define 0 cdlculo do
sobre-sinal:
ee oma cane
ig = Sad reg ico
Creg
Jé observamos na figura 3.12 que o sobre~ sinal depende
do valor do ¢. Esta dependéncia é dada pela seguinte expressao:
: TEP) on
Bye en (ONTO) Eq. 3.39
A figura desenhada a seguir, ilustra a dependéncia do
sobre-sinal em relagdo ao valor de % descrito na equacao 3.39.
As
\
i
oe
a me
05
Figura 3.15 - Curva do sobre-sinal S em funcao det
Na figura 3.15, observamos a relagao entre o sobre-sinal
e o valor de z. Neste grdéfico, o valor do sobre-sinal 16% que
acontece quando ¢ = 0.5, foi destacado, por ser um valor de so
bre-sinal bastante utilizado em projetos.
b) Tempo de Subida (ts)
© tempo de subida é definido da mesma forma que nos sis
temas de 1® ordem e seu valor pode ser calculado através da se
guinte expressao:
2 -1 (wa 7
ts= wa Eg. 3.40
s= i, tan cS) gq. 3.40
c¢) Tempo de Acomiodagao (ta)
© tempo_de acomodag3o é definido como o tempo gasto até
que as oscilacoés da saida nao ultrapassem uma faixa estipulada
de #5% em torno do valor final de regime.
Através da equag3o 3.38, podemos observar que 4 amorti
zaglo da oscilacdo depende da exponencial e-tWNt e, portanto
fy) oe 5 ip Aken $e)
podemos definir o tempo de acomodacgdo da mesma maneira que nos
sistemas de 19 ordem:
es ue
Twn 8
Eq. 3.41
Percebemos entao através da equagao 3.41, que a acomoda
Gao do sistema depende apenas da parte real dos pélos.
Para enfatizar o cdlculo.dos parémetros que definem a
qualidade de sistemas de 2? ordem com pélos complexos, seré re.
solvido um exemplo a seguir.
Exemplo 3.4 Calcular o erro de regime permanente, o_ sobre-sinal,
© tempo de subida e o tempo de acomodagéo do sistema
de controle de 2® ordem com polos complexos, dado seu
diagrama em blocos. Desenhar a curva da resposta a en
trada degrau.
Rls) Els) i Gls
+O7655
Primeiramente, devemos calcular a Fungo de Transferén
cia da seguinte maneira
C(s) =-E(s) . ———+__ E(s) = R(s) - C(s)
s?+0, 765s
c(s) = —Ris) ____ __ _¢(s)___
s?+0, 7655 8?+0,7658
Cla) cet CCS )ee ae eR Coy eeee
$740,7658 s7+0,765s
c(s) .[ 1+ 1 eR Ge eee
s?+0,765s/ 5?+0,7655
F(s) = C(8) = __S7#0, 765s _ F(s) = ———_1_—___
Rls} 14 1 5740, 765841
5740, 7655
a) Cdlculo do erro de regime permanente (Ereg)
© erro de regime permanente pode ser calculedo pela ex
pressio:
Ereg = lim s . E(s)
80
Calculando o valor de E(s), obtemos
E(s) = R(s) - C(s) E(s) = R(s) - R(s) . F(s)
63
a
o
Sabendo que R(s) entrada degrau, podemos escrever:
E(s) = 2-1, —__1___
= iat s74+0,765s+1
Be) Oe E(s) = ~8240.7658 _
s s7+0,765s+1 s(s?40,7658 + 1)
Podemos entaéo, calcular o erro de regime da seguinte maneira:
i 2 im 8240,7655_ _
Ereg - lim s . 87+ 7658 Byeg = 1im S70,7655_ _
ee s(s?+0,765s+1) 50 $°+0,765s+1
Observamos entSo que o sistema possui erro de regime per
manente nulo.
Antes de calcular os préximo parametros de qualidade, de
vemos calcular os valores de 5, wn, wd e §, pois sabemos que os
pardmetros dependem destes valores.
Igualando-se o polinémio caracteristico do sistema com
a expressao s?+2twns + wn?, obtemos as seguintes equagdes:
2.5.wn = 0,765 wa? = 1
Resolvendo este sistema de equagao, concluimos que:
wns 1 = 0,3825
© cdlculo de wd e 6 é realizada da seguinte maneira:
6 = tewn = 1 . 0,3825 6 = 0, 3825
wd = Vi - 2). wn =V/1 - 0,3825?'. 1 wd = 0,924
Sendo assim, os pdlos do sistema vatem:
51 = -0,3825 + 5 0,924 S2 = -0,3825 - 40,924
b) Cdiculo do sobre-sinal (Ss)
0 sobre-sinal é calculado através da seguinte férmula:
s =e (NI - FT S$ = e7 (0, 3825/\1-0, 3825?" ).3,14
S = 0,2726
Observamos ent&o, que o sobre-sinal deste sistema vale
27, 268.
c) Tempo de Subida
Para calcular o tempo de subida, devemos utilizar a se
guinte expressao:
ts =. tan! [ud eee ee eee Tog 4
wd é 0,924 0, 3825
ae zerti
© tempo de subida deste sistema vale 1,275 segundos.
d) Tempo de Acomodagao (ta)
© tempo de acomodagdo depende da parte real dos pélos
e pode ser calculado da seguinte maneira:
64
tas ta = —3__ ta = 7,843s
3 0, 3825
© tempo gasto para o sistema entrar em acomodagao na f:
xa de 5% 6 de 7,843 segundos.
e) Curva de resposta transitéria 4 entrada degrau
© gréfico desenhado a seguir, ilustra a resposta tran
sitéria do sistema & entrada degrau com os parametros calculados
anteriormente.
Jen
4) Caso Amortecimento Nulo (¢ = 0)
Aplicando , = 0 na equagao da resposta transitéria & en
trada degrau de sistemas de 28 ordem, equagdo 3.38, temos:
c(t) = 1 - cos wat Eq. 3.42
Sabendo que wd = wn) e que 5= 0, podemos con
cluir que: -
e(t) = 1 - cos wnt Eq. 3.43
Através da equagdo 3.43, podemos observar que o sistema
com amortecimento nulo (= 0) oscila permanentemente com fre
quéncia de valor wn. Na prdtica, estes sistemas ndo sdo utiliza
dos como sistemas de controle, pois nao ha uma estabilizacgao do
valor da saida em um certo valor de regime permanente.
Exercicios Propostos
Ex. 3.4: Calcular os parémetros que definem a qualidade do siste
ma de 28 ordem referente ao diagrama em blocos desenhado
abaixo, e desenhar o grafico da resposta 4 entrada de
grau, especificando os valores calculados.
Als] Els) cls)
65
Ex. 3.5 Dado o sistema de controle de 2® ordem através do seu dia
grama em blocos desenhado abaixo, calcular a qualidade
do sistema e desenhar a curva da resposta & entrada de
grau, anotando os valores calculado!
Ris) Els) a 20 cls)
Ex. 3.6 Determinar a qualidade de funcionamento do sistema de 2?
ordem, dado o seu diagrama em blocos e desenhar a curva
da resposta & entrada degrau, anotando os valores calcu
lados.
Ris) Els) 225
ls) aap s
S st+2s tT
Ex, 3.7 Dado o diagrama em blocos de um sistema de controle, cal
cular o valor de K para que o tempo de subida seja 0,1s.
Determinar 0 erro de regime permanente nesta situagao
Ris] (saad) nak cls)
st10
Ex. 3.8 Determinar o valor de F para que o sistema com a _seguin
te Fungaéo de Transferéncia apresente sobre-elevacao de
9,5% (& = 0,6). Calcular o tempo de subida e o tempo de
acomodagio nesta situagao.
F(s) = ——302—____
2+ 12s + 1OF
3.4 Estabilidade de Sistemas
No projeto de sistemas de controle, faz-se necessdria ume
andlise de estabilidade para garantir um bom funcionamento , dos
sistemas
Existem varias definigdes de estabilidade, sendo que a
mais utilizada no estudo de sistemas é a estabilidade BIBO.
A_estabilidade BIBO ("Bounded Input - Bounded Output ")de-
fine um sistema estavel se e somente se para qualquer entrada li
mitada aplicada ao sistema, sua saida for limitada.
66
Desta forma, garantida a estabilidade de um determinado
sistema, aplicando-se uma entrada dentro de um determinado limi
te, sabemos que sua saida nado ultrapassard certo limite.
Tomando como exemplo o controlador de posigéo de ante
na descrito no capitulo 2, se sabemos que o sistema 6 estdvel
garantimos que a posigdo da antena nao ultrapessa certo limite
aplicando ao sistema entradas limitadas. Uma instabilidade deste
sistema pode causar, por exemplo, um movimento continuo da ante
na numa determinada diregdo, tendendo a posigao para infinito e
desta maneira, no temos um controle da saida do sistema.
De acordo com a definigéo, para analisar a estabilidade
de um dado sistema, temos que aplicar todas as entradas limita
das possiveis e observar que as saidas também sao limitadas.
Caso todas as entradas limitadas gerem saidas limitadas,
© sistema é estdvel. Caso uma ou mais das saidas seja nao limita
da, podemos afirmar que o sistema é instdvel.
© problema em se utilizar a definigad na andlise de esta
bilidade de sistemas é que é invidvel a aplicacgdo de todas = as
infinitas entradas limitadas existentes com a andlise das respec
tivas saidas.
Desta maneira, para analisar a estabilidade de um deter
minado sistema podemos utilizar o seguinte teorema
TEOREMA: Um sistema é estdvel se e somente se todos os pélos es
tiverem contidos no semiplano esquerdo aberto, ou seja,
os pélos reais devem ser negativos e os polos comple
xos com parte real negativa; caso contrdrio o sistema é
dito instdve1.
A utilizacg3o deste teorema nos obriga a calcular os ps
los do sistema para analisar a estabilidade. Caso estes polos
sejam reais negativos ou complexos com parte real negativa, afir
mamos que o sistema é estdvel, se houver um ou mais pélos reais
positivos ou nulos, ou pélo-complexo com parte real positiva ou
nula, dizemos que o sistema é instdvel.
A seguir, serdo calculados alguns exemplos de andlise de
estabilidade de sistemas.
Exemplo 3.5 Dada a Fungao de Transferéncia de um sistema de con
trole, analisar a estabilidade.
2
s7+6s+8
F(s)
7 Observando o polinémio caracteristico da Fungao de Trans
feréncia, para calcular os pélos devemos resolver o seguinte sis
tema de equagée:
si+s2= -6
eyes 8
Resolvendo este sistema, concluimos:
Sabendo que o sistema possui dois pdlos e que ambos sao
ntimeros reais e negativos, podemos afirmar que o sistema é esta
vel.
67
Sistema Estével
Exemplo 3-6 analisar_a estabilidade do sistema de controle, dada
sua Fungo de Transferéncia.
F(s) = —10__
i s(s+8)
Igualando-se o polinémio caracter{stica da Fungéo de
Transferéncia a zero, concluimos que o sistema possui os seguin
tes polos.
s(s+8) = 0 5120 s2= -8
Este sistema possui 2 pélos, sendo que um deles € nulo,
© que resulta em uma instabilidade do sistema.
Sistema Instdvel.
Exemplo 3.7 Determinar se 0 sistema, cuja Fungao de Transferén
cia dada a seguir, é estavel.
F(s) = —3_
s?-s-6
Para calcular os pdélos do sistema devemos determinar os
valores de s que satisfazem a seguinte igualdade:
s?-.5-6=0
Resolvendo esta igualdade, temos
ea e pape
Pelo fato de um dos pdlos ser real positivo, podemos afir
mar que o sistema é instdvel.
Sistema Instével
‘
Exemplo 3.8 Analisar_a instabilidade do sistema de controle, dada
sua Fungéo de Transferéncia.
1
3740, 765s+1
F(s) =
Calculando os pélos deste sistema, concluimos:
5] = -0,3825 + 50,924
S2 = -0,3825 - 50,924
Observamos ent&o que o sistema tem 2.pélos complexos con
jugados. A parte real destes pdélos é negativa, o que nos garante
a estabilidade do sistema.
Sistema Estavel
Através do Teorema descrito anteriormente, — conseguimos
analisar de uma maneira rapida e facil a estabilidade de sistema
de ordem menor ou igual a 2. No caso de sistemas de ordem maior
que 2, podemos ter dificuldades em calcular os pélos, complican
do a andlise da estabilidade.
Para analisar a estabilidade de sistemas de ordem maior
que 2, podemos utilizar os critérios descritos a seguir:
68
CRITERIO DE HURWITZ: Um sistema sé pode ser estdvel se todos os
coeficientes do polinémio caracteristico ti
verem o mesmo sinal, se algum for nulo, na
da se pode afirmar.
Analisando este critério, podemos tirar as seguintes con
clusoes:
a) Caso um dos coeficientes do polindmio caracteristico seja nu
lo, nada podemos afirmar em relag3o 4 estabilidade do siste
ma, @ n&o ser no caso em que o coeficiente independente de s
seja nulo, neste caso, podemos colocar s em evidéncia, e um
dos pélos seré s = 0, resultando em sistema instdvel;
b) Caso os coeficientes do polinémio caracteristico tenham °
mesmo sinal, esta 6 uma condigao necesséria para a estabili
dade de sistemas mas nao suficiente. Sendo assim, nada pode
mos afirmar em relagdo a estabilidade de sistemas. Este caso
se aplica apenas quando nenhum dos coeficientes for nulo.
c) Caso nenhum dos coeficientes seja nulo e existam coeficientes
positivos e negativos, este sistema nao atende ao requisito
necessério para estabilidade, descrito no item anterior, e
podemos engao afirmar que o sistema é instdvel.
Desta forma, este critério é bastante fécil de ser uti
lizado, mas fraco em aplicagaéo, pois a aplicagao deste critério
nao detecta sistemas estdveis.
Os exemplos descritos a seguir, ilustram a aplicagao do
critério descrito anteriormente.
Exemplos: Analisar a estabilidade dos sistemas dadas as suas res
pectivas Fungées de Transferéncia, utilizando o Crité
rio de Hurwitz.
3s +2
-28?+6s+10
Exemplo 3.9 F(s) =
’
Analisando os coeficientes do polinémio caracteristico ,
percebemos que existem todos os coeficientes e apenas um deles
possui sinal negativo. Desta forma, podemos concluir que o sis
tema é instdvel.
Sistema Instével
3s +2
s?+25?+65+10 Sas
Exemplo 3.10 F(s) = 7
Este sistema possui todos os coeficientes do polinémio ca
racteristico e estes coeficientes sao todos positivos. Desta ma
neira, 0 Critério de Hurwitz esté satisfeito, mas nada podemos
afirmar em relagéo & estabilidade do sistema.
Nada se pode afirmar
Exemplo 3.11 F(s) = SS -
~2s?+10
© polinémio caracteristico deste sistema nao possui o
coefitiente do termo s e, portanto, nada podemos afirmar em rela
69
cdo 4 sua estabilidade.
Nada se pode afirmar
Todos os coeficientes da primeira coluna a
Matriz de Routh devem ter o mesmo sinale 5
rem diferentes de zero (até o termo n+2, ond
n & a ordem do sistema) para que o sistema s.
ja estdvel.
CRITERIO DE ROUT: a
e
e
e
Para aplicar o Critério de Routh, devemos construir a
Matriz de Routh. Esta matriz é construida através do polindmio
caracteristico do sistema, que pode ser descrito da seguinte for
ma:
apsm + apsM-l + agst-2 +... + an
+++, an 880 0s coeficientes do polinémio carag
onde ay, a),
teristico.
A Matriz de Routh é construida com estes coeficientes e
completada com outros calculados a partir destes primeiros, da
seguinte maneira:
.
Bye oa:
oe
[ee ag ae
ond Os termos b da 3@ linha so calculados da seguinte
forma:
ayay - agra a1.ay - aoa
3 7 3 i 1.8 o.as
1 ay
by = 21:86 = ap-a7
ar
Este célculo sé termina quando calcularmos bn = 0. Isto
ocorre normalmente, uma coluna antes do termo zero da linha an
terior.
2) Os termos c da 4# linha s8o calculados da — seguinte
maneira: .
¢, = bicaa = al-b3 bi.as ~ al-bs
c
3 Bi
De mesma forma, este cdlculo termina quando calculamos
cn = 0, normalmente uma coluna antes do zero da linha b.
1 Dy
3) Os termos d, e, £, etc. sdo calculados até encontrar
mos um zero na 1? coluna. Este zero termina,o cdlculo
de Matriz de Routh.
10
Dizemos que o sistema é estdvel se e somente se os coe
ficientes da 1¢ coluna da matriz (a9, aj, by, C1, Gy, etc) tive
rem o mesmo sinal e sé o termo n+2, onde n @ a ordem do sistema,
for nulo. Caso ocorra um termo_nulo antes do termo n+#2 na 1? co
luna, ou os terms desta coluna nao sejam todos os mesmo sinal, 0
sistema é instével.
Sendo assim, no caso de sistemas de 28 ordem, apenas 0
termo cj pode ser nulo e os termos ag,a1 € bi devem ter o mesmo
sinal e diferentes de zero para que o sistema seja estdvel.
Em sistema de 38 ordem, apenas o termo 4) pode ser nulo,
em sistema de-4® ordem, apenas o termo e; pode ser nulo e assim
por diante.
Devemos tomar cuidado quando o Polinémio Caracteristico
possui algum termo nulo, pois devemos escrever este termo na Ma
triz de Routh no seu devido lugar. Percebemos que o critério de
Routh 6 bastante forte, determinando a estabilidade de sistemas
de qualquer ordem.
Os exemplos calculados a seguir, ilustram a andlise da
estabilidade de sistemas, utilizando o Critério de Routh.
Exemplos: Verificar, utilizando o Critério de Routh, a estabili
dade dos sistemas de controle dadas suas Fungdes de
Transferéncia. >
3
Exemplo 3.12. F(s) =
38242845 Goo eT
Primeiramente, devemos escrever os coeficientes do Poli
némio Caracteristico na Matriz de Routh, tomando cuidado com a
existéncia de algum coeficiente nulo, resultando:
ano
3005
Pies ‘
oan]
4 4|
Podemos perceber que como o sistema é de 3® ordem, a ma
triz pdéra na 5® coluna onde observaremos que di = 43 = 0.
A seguir, serdo calculados os termos bi, b3, ci, ¢3,d) e
aa.
Bye seo eee 7
3 3
+5 - 3.0
cis 5
a
3
e3= °
e1.b3 - bic
ay 1D3 1:3 7s
¢
a3 2910+ b10 2 9
©.
Desta maneira, podemos montar a seguinte Matriz de Routh.
n
ie
oooun
Podemos entéo tirar 2 regras prdticas no cdlculo dos ter
mos da matriz de Routh:
a) Quando os 2 termos das 2 linhas acima e coluna seguinte do
termo a ser calculado forem nulos ou n&o existirem, o termo
a ser calculado é nulo.
b) Quando o termo da linha superior e coluna seguinte do termo
a ser calculado for nulo, o valor do termo a ser calculado é
© mesmo valor do termo da coluna seguinte, duas linhas acima.
Estas regras podem ser observadas no cdlculo dos termos
da matriz deste exemplo:
termo b3: seu valor é zero por néo haver coluna seguinte
termo c1: seu valor 6 o mesmo do termo da coluna seguinte, duas
linhas acima
termo di: seu valor é zero porque os dois termos da coluna se.
guinte, linhas acima, sao nulos.
Analisando a 1# coluna da Matriz de Routh, observamos que
todos os termos possuem o mesmo sinal e apenas o termo d é nulo
(sistema de 3# ordem), podendo concluir que o sistema é estédvel.
Sistema Estdvel.
Exemplo 3.13 F(s) = —10(s+l
5?+857+255+10
Da mesma forma que o exemplo anterior, devemos preen.
cher a seguinte matriz de Routh:
1 25
8 10
bi ba
cl o3
Para que o sistema seja estdvel devemos ter b1e c1 posi
tivos e diferentes de zero.
Os termos bj e cj sao calculados da seguinte maneira:
by = 8:25-1:10 = 23,75 ¢, = PElO-B.d3
8 by
Sendo que b3 = 0 porque n&éo existe 3® coluna, podemos
calcular ¢c}:
23,75.10 - 8.0
Je eet sneuciaoem ioe iseacnaed 20:
: 23,75
Como os valores de bj e cj sSo positivos e diferentes de
zero, dizemos que o sistema é estavel.
Sistema Estdvel
72
Exemplo 3.14F(s) =
1
3
b
e1
0 cdélculo de by resulta:
bi
Pelo fato do termo b, ser de sinal contrdério dos 2
meiros termos da 1® coluna, podemos concluir de imediato que
sistema é instdvel.
Sistema Instdvel
Exemplo 3.15 F(s) =
Neste caso,
nomio caracteristico Q(s),
(s?+#2s)(s?+s+10) + 10
Q(s)
ats)
Neste sistema de 4® ordem,
pois 0 cdlculo de e, resulta 0
1
3
bi
c1
a
Os termos sao calculados da seguinte maneira:
3.12 ~
Bay
bs
c.e
A matriz.de Routh deste sistema resulta:
1
3
5,33
1
14,375
10
2
10
b3
3
a2
12
20
ba
c3
d3
0
bi.20 =
°
b3
0
12
20
10
s?+35?+2s+10
s(s+2)(s?+s+10)+10
precisamos primeiramente desenvolver o
+ 12s? + 20s + 10
a matriz termina na coluna
5.33.20 10
oooon
Analisando a 1 coluna desta matriz, concluimos que °
sistema 6 estével.
Sistema Estével
Exemplo 3.16 F(s) s 0.
s?-4
Este caso possui o coeficiente de 5 nulo e devemos = eS.
crever © polinémio caracteristico da seguinte forma
Q(s) = s? + 0s - 4
A matriz de Routh para sistemas de 2® ordem é da seguin
te forma
3 -4 .
oO 0
bi b3
ca cg
Pelo fato do 22 termo da 1@ coluna da matriz ser nulo
nem precisamos calcular os termos que faltam para concluir que
© sistema é instdvel .
Exercicios Propostos
Ex. 3.9 Um sistema possui a seguinte Fungdo de Transferéncia:
G(s) = —L—
s(s+3)
a) 0 sistema é estével? Por qué?
b) Aplicando-se uma realimentagaéo negativa ao sistema
conforme figura abaixo, calcular a nova Fungao de
Transferéncia e dizer se o sistema é estdvel.
R
bs) Gls) cls
125
Ex.3.10 Analisar_a estabilidade do sistema, dada sua Fungao de
Transferéncia abaixo:
F(s) = aoe
s(s+1)(s+2)(s+5)
Ex. 3.11 Aplicando-se ao sistema do exercicio anterior uma reali
mentagao negativa, conforme figura a seguir, calcular a
nova Fungao de Transferéncia do sistema e determinar os
valores de K que tornam o sistema estdvel.
4
cls)
Rls} G(s)
Ex. 3.12 Um sistema possui a seguinte Fungio de Transferéncia:
F(s) = ———__2k_ ______
5(s+5)(s?+2s+8) + 3K
Determine os valores de K que tornam o sistema estdvel.
Ex. 3-13 Um sistema possui a seguinte Funcdo de Transferéncia:
20
s(s+4) (s?+s5+8)+k
Determine os valores de k que tornam o sistema estdvel.
F(s) =
2 bony » ° 42 Zee
5-15 { -
ote ee : ;
u
Sok
aye
. ~ = ~ >
i 4 a
[es aes 2,% :
a
75
Você também pode gostar
- Cap 06 Estudo Dos Controladores Proporcionais - Integral e Derivativo e Do Controlador PLLDocumento30 páginasCap 06 Estudo Dos Controladores Proporcionais - Integral e Derivativo e Do Controlador PLLigor_fatecAinda não há avaliações
- Cap 08 Introdução Ao Controle Digital de Motores DC Com RealimentaçãoDocumento19 páginasCap 08 Introdução Ao Controle Digital de Motores DC Com Realimentaçãoigor_fatecAinda não há avaliações
- Cap 081 Introdução Ao Controle Digital de Motores DC Com RealimentaçãoDocumento19 páginasCap 081 Introdução Ao Controle Digital de Motores DC Com Realimentaçãoigor_fatecAinda não há avaliações
- Cap 02 Sistemas de Controle Analógicos Com RealimentaçãoDocumento24 páginasCap 02 Sistemas de Controle Analógicos Com Realimentaçãoigor_fatecAinda não há avaliações
- Cap 01 Considerações GeraisDocumento3 páginasCap 01 Considerações Geraisigor_fatecAinda não há avaliações
- Cap 04 Estudo Dos Motores de Correntes ContínuaDocumento9 páginasCap 04 Estudo Dos Motores de Correntes Contínuaigor_fatecAinda não há avaliações
- Cap 03 Critérios de Qualidade de SistemasDocumento36 páginasCap 03 Critérios de Qualidade de Sistemasigor_fatecAinda não há avaliações
- Apêndice À Resposta Dos Exercicios PropostosDocumento7 páginasApêndice À Resposta Dos Exercicios Propostosigor_fatecAinda não há avaliações
- Cap 09 Estudo Dos Motores de PassoDocumento8 páginasCap 09 Estudo Dos Motores de Passoigor_fatecAinda não há avaliações
- Cap 10 Introdução Ao Controle Digital de Motor de PassoDocumento14 páginasCap 10 Introdução Ao Controle Digital de Motor de Passoigor_fatecAinda não há avaliações
- Cap 05 Projeto de Sistema de Controle de Velocidade de Motor DCDocumento15 páginasCap 05 Projeto de Sistema de Controle de Velocidade de Motor DCigor_fatecAinda não há avaliações
- Cap 07 Compensação de SistemasDocumento14 páginasCap 07 Compensação de Sistemasigor_fatecAinda não há avaliações
- Cap 06 Estudo Dos Controladores Proporcionais - Integral e Derivativo e Do Controlador PLLDocumento30 páginasCap 06 Estudo Dos Controladores Proporcionais - Integral e Derivativo e Do Controlador PLLigor_fatecAinda não há avaliações
- Cap 05 Projeto de Sistema de Controle de Velocidade de Motor DCDocumento15 páginasCap 05 Projeto de Sistema de Controle de Velocidade de Motor DCigor_fatecAinda não há avaliações
- Cap 081 Introdução Ao Controle Digital de Motores DC Com RealimentaçãoDocumento19 páginasCap 081 Introdução Ao Controle Digital de Motores DC Com Realimentaçãoigor_fatecAinda não há avaliações
- Cap 02 Sistemas de Controle Analógicos Com RealimentaçãoDocumento24 páginasCap 02 Sistemas de Controle Analógicos Com Realimentaçãoigor_fatecAinda não há avaliações
- Cap 07 Compensação de SistemasDocumento14 páginasCap 07 Compensação de Sistemasigor_fatecAinda não há avaliações
- Cap 04 Estudo Dos Motores de Correntes ContínuaDocumento9 páginasCap 04 Estudo Dos Motores de Correntes Contínuaigor_fatecAinda não há avaliações
- Cap 01 Considerações GeraisDocumento3 páginasCap 01 Considerações Geraisigor_fatecAinda não há avaliações
- Cap 08 Introdução Ao Controle Digital de Motores DC Com RealimentaçãoDocumento19 páginasCap 08 Introdução Ao Controle Digital de Motores DC Com Realimentaçãoigor_fatecAinda não há avaliações
- Cap 10 Introdução Ao Controle Digital de Motor de PassoDocumento14 páginasCap 10 Introdução Ao Controle Digital de Motor de Passoigor_fatecAinda não há avaliações
- Cap 09 Estudo Dos Motores de PassoDocumento8 páginasCap 09 Estudo Dos Motores de Passoigor_fatecAinda não há avaliações
- Apêndice À Resposta Dos Exercicios PropostosDocumento7 páginasApêndice À Resposta Dos Exercicios Propostosigor_fatecAinda não há avaliações
- Fenômenos de TransporteDocumento161 páginasFenômenos de Transporteigor_fatecAinda não há avaliações
- Apostila dtm2 Desenhos de ConjuntosDocumento27 páginasApostila dtm2 Desenhos de Conjuntosderso139Ainda não há avaliações