Escolar Documentos
Profissional Documentos
Cultura Documentos
2TLA2 - 09LudwigJunior Arquitectura Neuronal Hibrida
Enviado por
Martha BarahonaTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
2TLA2 - 09LudwigJunior Arquitectura Neuronal Hibrida
Enviado por
Martha BarahonaDireitos autorais:
Formatos disponíveis
126
IEEE LATIN AMERICA TRANSACTIONS, VOL. 2, NO. 2, JUNE 2004
Uma Arquitetura Neural Hbrida para Extrao de
Regras Nebulosas
Oswaldo Ludwig Jnior; Leizer Schnitman; Herman Lepikson
Universidade Federal da Bahia, Departamento de Engenharia Eltrica, Salvador-BA-Brasil.
E-mail:oludwig@terra.com.br
Resumo: Este artigo prope uma arquitetura neural hbrida
(i.e. neuro-fuzzy) capaz de gerar regras nebulosas do tipo
Takagi-Sugeno, assim como ajustar os parmetros das
funes de pertinncia e sada das supracitadas regras. A
idia a utilizao deste algoritmo para a aproximao de
funes cuja nica informao disponvel so as relaes
entrada-sada, sem requerer prvia anlise dos dados. Sendo
assim, inicialmente, o usurio define apenas o nmero de
regras nebulosas que o sistema dever produzir. Aps o
treinamento, o algoritmo proposto capaz de definir as
regras nebulosas, igualando-se ao modelo ANFIS de J.S.R.
Jang, incrementado pela convenincia de no requerer o
conhecimento prvio e emprico da estrutura das regras fuzzy.
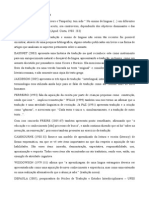
A Figura 1 ilustra a arquitetura do ANFIS. Nesta figura
pode-se perceber que as duas primeiras camadas no so
amplamente conectadas. Na configurao das ligaes
entre estas duas camadas esto implicitamente
caracterizados os antecessores das regras.
Palavras Chave: lgica fuzzy, redes neurais, ANFIS, regras
fuzzy, inteligncia artificial.
I. INTRODUO
freqente o uso da lgica nebulosa para a modelagem de
sistemas caixa-cinza, ou seja, sistemas nos quais existe
algum conhecimento sobre o processo [8]. Assim, o
projetista pode incorporar arquitetura fuzzy uma base de
regras, bem como definir os conjuntos nebulosos e suas
funes de pertinncia para a modelagem do sistema. Tais
regras so incorporadas rede indiretamente, por meio das
conexes adotadas entre os conjuntos fuzzy e os
produtrios (ver Figura 1). Estes ltimos representam a
aplicao de uma T-norma probabilstica [3], que tem por
finalidade avaliar o grau de pertinncia das entradas
conjuno das premissas.
Uma arquitetura fuzzy adaptativa tem por objetivo o ajuste
dos parmetros livres de um sistema fuzzy, que podem ser
os parmetros das funes de pertinncia (i.e.
antecedentes) e/ou dos conseqentes das regras. O modelo
ANFIS (Adaptative-Network-Based Fuzzy Inference
System) de J.S.R. Jang [1] um exemplo tpico de
arquitetura fuzzy adaptativa. Este sistema se fundamenta no
modelo fuzzy de Takagi-Sugeno-Kang [5] com uma
arquitetura direta em cinco camadas.
O presente trabalho prope uma arquitetura fuzzy
adaptativa baseada no algoritmo ANFIS. Entretanto, o
modelo aqui proposto se difere do ANFIS por ser capaz de
definir automaticamente a base de regras fuzzy. Tal
caracterstica facilita o emprego deste algoritmo na
modelagem de sistemas tipo caixa-preta, tarefa que, com
uso de tcnicas neuro-fuzzy a exemplo da ANFIS, exigiria
uma anlise inicial dos dados.
Figura 1. Grafo de fluxo do modelo ANFIS
Figura 2. Grafo de fluxo do modelo proposto antes do corte de
sinapses.
O modelo proposto neste trabalho iniciado com uma
arquitetura amplamente conectada, ou seja, no existem
regras implcitas nas conexes da rede (vide Figura 2). Em
lugar disto, as conexes entre a camada de entrada
(fuzzyficao) e as T-normas (produtrios) so dotadas de
pesos sinpticos. Pelo mtodo proposto, estes pesos devem
ser ajustados dentro de um determinado intervalo de
valores, durante o processo de treinamento dos parmetros
livres da rede, conforme justificaremos adiante. Assim, o
processo de treinamento desta rede exige um procedimento
de otimizao com restries de desigualdade.
LUDWIG JNIOR et al.: A HYBRID NEURAL ARCHITECTURE
127
O processo de treinamento ocorre em quatro etapas: na
primeira so ajustados os pesos das funes de sada (i.e.
conseqentes), em seguida, das sinapses introduzidas entre
a camada de entrada e os produtrios e finalmente das
funes de pertinncia. A segunda etapa ocorre quando o
erro mdio quadrtico alcana valores aceitveis. Ento,
uma parte das sinapses introduzidas entre a primeira e a
segunda camada eliminada, segundo critrios
apresentados adiante. A partir deste ponto a rede proposta
se iguala ao modelo ANFIS, pois as sinapses desativadas,
revelam a base de regras gerada automaticamente pelo
algoritmo. Na terceira etapa, o processo de ajuste
prossegue de forma idntica ao ANFIS. Finalmente, na
quarta etapa, o algoritmo elimina as regras consideradas
como menos relevantes, tornando a base de regras menos
redundante e, possivelmente, mais inteligvel.
visto que este ltimo muito apropriado otimizao com
restries de desigualdade.
Uma abordagem interessante para otimizao com
restries em AG, a que penaliza a aptido f(x) de
cromossomos que no atendam s restries atravs de
uma funo de pnalti [4], dada por:
j(x)=max(0, gj(x))
Reduzindo o problema mencionado acima a um problema
de otimizao irrestrita, conforme segue:
m
minimize: h ( x ) = f ( x ) + r 2j ( x )
j =1
s.a.: x
II. INICIAO DO ALGORITMO
Observando a Figura 1, possvel perceber que cada
produtrio se associa a uma regra fuzzy. Sendo assim, o
nmero de regras equivalente ao nmero de produtrios.
A regra, por sua vez, composta pelo produtrio e
respectiva funo de normalizao e funo de sada.
(3.1)
onde r a constante de pnalti e m o nmero total de
restries gj(x).
O resultado desta etapa a obteno de um modelo que se
ajusta aos dados apresentados no treinamento.
IV. SEGUNDA ETAPA DE TREINAMENTO
Neste trabalho, prope-se que o projetista defina apenas o
nmero de regras que o sistema ir gerar. Isto feito
atravs da escolha do nmero de linhas associadas a
produtrios, responsveis por definir a arquitetura da rede
da Figura 2.
Este trabalho adota funes de pertinncia gaussianas pela
sua ampla aplicao e facilidades computacionais, a
exemplo da obteno das derivadas das funes para
futuros processos de treinamento. Os critrios para a
atribuio dos parmetros iniciais dos antecessores das
regras (i.e. centride e disperso das funes de
pertinncia), bem como os parmetros iniciais da funo de
sada (aqui proposto o uso de funo linear, ou seja,
uma base de regras TSK de ordem 1), podem ser
encontrados em [1]. Os valores iniciais dos pesos
sinpticos devero atender condio:
mj=1 , onde [0; 1]
(2.1)
Estes valores aleatrios devero atender a uma distribuio
de probabilidades uniforme.
III. PRIMEIRA ETAPA DE TREINAMENTO
Nesta etapa a rede recebe treinamento supervisionado,
onde so ajustados os parmetros dos conseqentes das
regras, em seguida, os pesos sinpticos e finalmente os
parmetros das funes de pertinncia. O ajuste dos pesos
sinpticos deve atender restrio da Equao 2.1.
Conforme justificado adiante.
No processo de ajuste de parmetros possvel aplicar
mtodos de otimizao com restries a exemplo do
gradiente projetado [7] ou algoritmo gentico (AG) [4],
Uma vez que a condio de parada para o algoritmo de
treinamento da etapa I seja satisfeita, a proposta eliminar
as sinapses menos relevantes entre a camada de fuzificao
e o produtrio das regras, igualando o modelo proposto ao
ANFIS. Assim, a capacidade de ajuste deste modelo , no
mnimo, igual a de um modelo ANFIS com um nmero de
regras equivalente.
O critrio utilizado para indicar a relevncia de um
conjunto fuzzy Am para a regra j=1,2,...R
fundamentado no valor esperado do grau de ativao desta
regra, definido pela equao abaixo:
E[Wj ( xn )] =
m=1 Amj E[ Am ( xn )]
M
(4.1)
onde:
Am(xn) o grau de pertinncia da coordenada de entrada
xn ao conjunto fuzzy Am;
E[Am(xn)] o valor esperado do grau de pertinncia
Am(xn), definido pela expresso:
+
E[ Am ( xn )] =
Am ( xn ) f xn (xn )dxn
(4.2)
fxn(xn) a funo de densidade de probabilidade (fdp) da
varivel xn, ou seja, fxn(xn)=Fxn(xn)/xn e Fxn(xn) a
funo de distribuio de probabilidades da varivel xn,
mais especificamente, Fxn(xn)=P{Xn xn };
128
IEEE LATIN AMERICA TRANSACTIONS, VOL. 2, NO. 2, JUNE 2004
Amj: valor da sinapse entre o conjunto fuzzy Am e o
produtrio da regra j.
Wj(xn) o grau de ativao da regra
j em funo da
entrada xn, ou seja:
O corte das sinapses deve preservar ao mximo a
relevncia da regra no clculo da sada estimada, ou seja, o
objetivo cortar as sinapses preservando ao mximo o
valor esperado do grau de ativao da regra.
Se definirmos a relevncia do conjunto fuzzy Am para a
regra j como:
Wj(xn)=A 1 A 2 ...A m(xn)= m(A m(xn));
E[Wj(xn)]: valor esperado de Wj(xn);
RAmj=E[A m(xn)]
A funo de distribuio de probabilidades obtida atravs
do ajuste de alguma funo de distribuio tpica (normal,
uniforme,...) sobre os dados de entrada. Este ajuste ,
freqentemente, obtido pelo uso do mtodo dos mnimos
quadrados [6].
Observao: importante que o lote de amostras extradas
para treinamento represente a realidade do problema a
ser identificado pelo sistema, no que tange questo da
sua distribuio de probabilidades. Ou seja, no
prudente, por exemplo, a omisso de amostras
redundantes.
Caso o lote de exemplos de treinamento possua uma
cardinalidade (i.e., nmero de amostras) expressiva,
possvel substituir, com pequena impreciso, o valor
esperado E[A m(xn)] pela mdia calculada conforme a
expresso:
1 k
Am ( x n )
k 1
(4.3)
onde k o nmero de amostras.
A simplificao acima est respaldada na primeira lei do
clculo das probabilidades:
p
E ( x)
1 k
x , quando k
k 1
A aproximao da Equao
implementao do algoritmo.
4.3
(4.4)
simplifica
(4.6)
a Equao 4.1 permite concluir que para cortar sinapses
entre conjuntos fuzzy e o produtrio de uma regra, com a
mnima degradao do valor esperado do grau de ativao
desta regra, o algoritmo deve eliminar as sinpses cuja
relevncia, definida na Equao 4.6, mnima. Desta
forma possvel definir regras fuzzy bem prximas s
regras iniciais que contm todas as sinapses.
As sinapses no eliminadas recebem o valor 1 para seus
pesos, com a finalidade de aproximar o algoritmo proposto
ao ANFIS. Deste aspecto, vem a necessidade da definio
de limites superiores e inferiores para os valores ajustados
dos pesos sinpticos. Como os pesos das sinapses no
eliminadas so igualados a um, no interessante que os
valores ajustados estejam muito distantes de um. Isto
explica a necessidade dos valores ajustados destes pesos
atenderem condio da Equao 2.1
O fato do algoritmo propiciar a gerao automtica das
regras, no suficiente para garantir a inexistncia de
regras conflitantes. Para evitar regras contraditrias, ou
seja, onde aparecem nas premissas condies
contraditrias do tipo:
SE x1
alto E x1 baixo E ... ENTO ...
so preservadas apenas as sinapses que tm a maior
relevncia RAmj dentre todas as sinapses que ligam os
conjuntos fuzzy que classificam uma coordenada de
entrada xn a uma regra j.
a
V. TERCEIRA ETAPA DE TREINAMENTO
A equao que define a sada estimada no algoritmo
ANFIS dada pela expresso abaixo:
y =
Amj
__
f j ( X )W
(4.5)
j =1
onde:
fj(X): funo de sada da regra j=1,2,..., R; que tem como
argumento o vetor X;
__
Wj: Grau de ativao normalizado da regra j
Da Equao 4.5 possvel concluir que quanto maior o
grau de ativao de uma regra, maior a sua participao no
somatrio ponderado que define a sada estimada.
A terceira etapa de treinamento idntica ao proposto em
[1]. Neste ponto, o algoritmo proposto se iguala ao ANFIS.
importante observar que esta etapa difere da primeira,
pois, nesta fase, a base de regras nebulosas j esta definida,
conforme ilustrado na Figura 1.
O processo de ajuste prossegue atravs do uso de
algoritmos de otimizao irrestrita, tais como mtodos
baseados no gradiente da funo de erro quadrtico. Os
parmetros ajustados nesta etapa so os pesos das funes
de sada (i.e. conseqentes) e das funes de pertinncia.
VI. QUARTA ETAPA DE TREINAMENTO
Nesta etapa, a proposta o corte de regras redundantes que
podem vir a ocorrer na base de regras, visto que as regras
so definidas atravs de critrios estatsticos.
LUDWIG JNIOR et al.: A HYBRID NEURAL ARCHITECTURE
129
O critrio adotado para eliminar as regras de menor
importncia , novamente, baseado no valor esperado do
grau de ativao das regras, pois, regras com o parmetro
E[Wj] pequeno tm, estatisticamente, menor contribuio
na soma ponderada que compe a sada estimada pelo
sistema.
A idia cortar as regras em funo da razo rj, dada pela
expresso:
rj =
E[Wj ( X )]
, k = 1,2,..., R
max k ( E[Wk ( X )])
(6.1)
Assim, inicialmente, a proposta o corte das regras que
atendam condio: rj <0,1. Em seguida, o algoritmo
retorna terceira etapa de treinamento, para ajustar a nova
base de regras. Caso o critrio de parada (i.e., o valor
limite para erro mdio quadrtico) seja alcanado, efetuase o corte de mais um lote de regras. Este processo se
repete at que o critrio de parada seja alcanado.
Critrios de parada usualmente se baseiam no nmero de
iteraes ou no erro mdio quadrtico. Um critrio
adequado ao mtodo proposto pode basear-se no erro
mdio quadrtico e considerar a existncia de rj <0,1.
A Equao 6.2 determina o valor esperado do grau de
ativao da regra j:
+
E(Wj) =
f xn(xn )... f x2 (x2 ) f x1(x1)Wj(x1, x2,...,xn )dx1dx2...dxn (6.2)
onde:
Wj= A m(x1) B m(x2) ... Zm(xn);
Em um primeiro experimento o sistema deve aproximar a
Equao 7.1 por meio de trs regras fuzzy. O algoritmo
gentico opera com uma populao de oitenta indivduos.
O conjunto de treinamento adotado constitudo de
duzentos pares de entradas e sadas alvo.
Aps treze iteraes o erro mdio quadrtico alcana o
valor 0,1296. As regras fuzzy geradas automaticamente
pelo sistema so:
se x1 grande e x2 mdio e x3 grande ento
y= 45,3x1-55,9x2+30,2x3+499,9
se x1 grande e x2 mdio e x3 mdio ento
y=-322,5x1-13,9x2-3,7x3+362,1
se x1 mdio e x2 mdio e x3 pequeno ento
y=556,0x1+91,6x2-114,2x3+151,9
As funes de pertinncia tm a forma:
Ai ( x) = e
|| xu ci ||
ai
(7.2)
Os valores ajustados para os parmetros centro e disperso
das funes de pertinncia so:
entrada conj. fuzzy
x1
pequeno
x1
mdio
x1
grande
x2
pequeno
x2
mdio
x2
grande
x3
pequeno
x3
mdio
x3
grande
parmetro c
1,1169
3,7293
7,4312
0,9323
4,1828
7,0315
0,8702
4,8518
7,8994
parmetro a
3,9259
5,6134
0,2541
5,3133
3,0302
5,2022
4,7730
2,7001
4,5475
fxn(xn): funo de densidade de probabilidade de xn.
Caso exista forte correlao entre as coordenadas xn do
vetor de entrada, necessrio o uso da funo de
distribuio de probabilidades conjunta. Sendo assim, o
processo se torna bem mais complexo. Neste caso, o ajuste
desta funo de distribuio exigiria um maior custo
computacional.
VII. RESULTADOS DE SIMULAES
Este texto tem nfase em aspectos tericos, assim, para
exemplificar o algoritmo proposto, implementada uma
simulao no ambiente Matlab. A ferramenta proposta
empregada na tarefa de aproximao de funes. Os
experimentos visam a aproximao da funo ilustrada na
Equao 7.1.
3
y=2x1 +3x2 +x3
onde x1, x2 e x3 [0, 10].
(7.1)
Figura 3. Histrico do erro mdio quadrtico com 3 regras
Na Figura 3 possvel notar que o erro mdio quadrtico
entre a terceira e quarta iteraes no se altera
significativamente, assim, o critrio de parada alcanado
e a segunda etapa de treinamento (i.e. o corte de sinapses)
aplicada. A terceira etapa de treinamento comea na
quinta iterao. Notar que o corte das sinapses implica em
130
IEEE LATIN AMERICA TRANSACTIONS, VOL. 2, NO. 2, JUNE 2004
acrscimo no erro mdio quadrtico na quinta iterao. O
erro volta a cair ao longo da terceira etapa de treinamento.
regras adequada requer variveis de entrada cujas medidas
de varincia so limitadas.
Em um segundo experimento o nmero de regras
acrescido para quatro e a populao mantida com o
mesmo nmero de indivduos do exemplo anterior.
Sendo assim, a metodologia proposta garante um bom
desempenho para valores de entrada mais provveis. O
mesmo no pode ser assegurado para entradas atpicas.
A base de regras fuzzy resultante do segundo experimento
suficiente para obter um erro mdio quadrtico de 0,0955
aps dezoito geraes. O conjunto de regras fuzzy gerado
:
Uma das dificuldades no uso de estruturas fuzzy
encontrar as funes de pertinncia e as regras que as
associam. Muitos autores propem mtodos treinar e
aperfeioar as funes de pertinncia e as funes dos
conseqentes das regras. Mtodos de agrupamento so os
mais comuns [9, 10, 19, 20, 21, 22, 23, 27]. Os mtodos
heursticos tambm so muito usados [12, 14, 15, 16].
Algumas pesquisas tratam o problema de inconsistncias
ou semelhanas entre regras [13, 24, 25, 26]. Alm disso,
h muitas tcnicas propostas para o ajuste das funes de
pertinncia [11, 17, 18].
se x1 grande e x2 mdio e x3 grande ento
y= 165,0x1-26,0x2+10,9x3+41,3
se x1 grande e x2 pequeno e x3 pequeno ento
y=253,6x1-119,4x2+112,4x3-32,9
se x2 grande e x3 grande ento
y=-454,3x1-78,0x2+136,6x3-79,1
se x3 pequeno ento
y=-519,0x1+60,2x2+498,1x3-405,4
Os valores ajustados dos parmetros de centro e disperso
das funes de pertinncia so:
entrada conj. fuzzy
x1
pequeno
x1
mdio
x1
grande
x2
pequeno
x2
mdio
x2
grande
x3
pequeno
x3
mdio
x3
grande
parmetro c
1,3214
2,6552
5,3644
0,9324
3,9592
5,0492
1,1755
3,4843
6,8521
parmetro a
4,2751
4,3272
2,7821
2,6251
3,3537
4,6153
5,3411
5,0259
2,0427
A Figura 4 ilustra a convergncia do algoritmo no segundo
experimento.
Figura 4. Histrico do erro mdio quadrtico com 4 regras.
VIII. CONCLUSES
O mtodo proposto neste trabalho se fundamenta em
estimativas sobre o valor esperado do grau de ativao das
regras. Assim, naturalmente, a gerao de uma base de
O algoritmo proposto neste trabalho difere dos demais por
no necessitar de uma base de regras fuzzy pr-definida
pelo usurio. Notar que os demais trabalhos citados tm
por objetivo diminuir o nmero de regras pr-definidas ou
ajustar as suas funes de pertinncia e sada.
Em linhas gerais, o algoritmo ainda requer informaes de
um especialista, uma vez que precisam ser definidos alguns
parmetros, tais como: o nmero mximo inicial de regras
e o erro mdio quadrtico tolervel. Contudo, a
determinao automtica da estrutura das regras e a
proposta de um mtodo para compactao da base de
regras, caracterizam a contribuio deste trabalho.
Agradecimentos:
Este trabalho tem o apoio da FAPESB.
REFERNCIAS BIBLIOGRFICAS
[1] Jang, J.S.Roger, A NFIS: Adaptative-Network-Based
Fuzzy Inference System, IEEE Trans. on System, Man
and Cybern 23 (3) pp.665-685 (May/Jun, 1993).
[2] Wang L.X., Adaptative fuzzy systems and control:
design and stability analisys, Prentice Hall, 1994.
[3] Zadeh, L.A., S yllogistic reasoning in fuzzy logic and
its application to usuality and reasoning with dispositions,
IEEE, SMC-15, n.6 (1985).
[4] Goldberg, D.E., Genetic Algorithms in Search,
Optmization and Machine Learning, Addison -Wesley
Publishing Company, Massachussets (1989).
[5] Takagi, T. and M.Sugeno, Fuzzy identification of
systems and its applications to modeling and control,
IEEE, SMC-15 (1985).
[6] Papoulis, A., Probability, Random Variables and
Stochastic Processes, McGraw -Hill Book Co.(1991)
[7] Luenberger, David G., Linear and Nonlinear
Programming, Addison -Wesley Publishing Co.(1989)
[8] Chang, T.M.; Yih, Y. Generating Fuzzy Rule -based
Systems from Exemples, Asian Fuzzy Systems
Symposium, Proc. of IEEE, p. 37-42, dec 1996.
LUDWIG JNIOR et al.: A HYBRID NEURAL ARCHITECTURE
[9] Shigeo Abe and Ming-Shong Lan: Function
Approximator Using Fuzzy Rules Extracted Directly from
Numerical Data. Proc. of the IEEE Int. Joint Conf. on
Neural Networks Vol. 2, pp1887-1892. 1993.
[10] Peter Baranyi and Teung Yam and Lszl T. Kczy:
Singular Value-Based Fuzzy Rule Interpolation. Proc. of
the IEEE Int. Conf. on Intelligent Engineering Systems pp
51-56, 1997.
[11] Te-Min Chang and Yuehwern Yih: Generating Fuzzy
Rule-Based Systems from Examples: Proc. of the IEEE
Asian Fuzzy Systems Symposium, pp 37-42, 1996.
[12] T.C. Chin and X.M. Qi: Genetic Algorithms for
Learning the Rule Base of Fuzzy Logic Controller. Fuzzy
Sets and Systems, Vol. 97, n 1, pp 1-7, 1998.
[13] Y. Cho and K. Lee and J. Yoo and M. Park:
Autogeneration of Fuzzy Rules and Membership Functions
for Fuzzy Modelling Using Rough Set Theory. IEE Proc.:
Control Theory and Applications, Vol. 145, n 5, pp 437442, 1998.
[14] M. Munir-Ul M. Chowdhury and Yun Li: Messy
Genetic Algorithm Based New Learning Method for
Structurally Optimized Neurofuzzy Controllers. Proc. of
the IEEE International Conference on Industrial
Technology, pp 274-278, 1996.
[15] Julie A. Dickerson: Learning Optimal Fuzzy Rules
Using Simulated Annealing. Proc. of the Annual Conf. of
the North American Fuzzy Information Processing Society
NAFIPS, pp 102-105, 1997.
[16] Wael A. Farag and Victor H. Quintana and Germano
Lambert-Torres: Neuro-Fuzzy Modeling of Complex
Systems Using Genetic Algorithms. Proc. of the IEEE Int.
Conf. on Neural Networks, Vol 1, 444-449, 1997.
[17] Franois Guly and Patrick Siarry: Gradient Descent
Method for Optimizing Various Fuzzy Rule Bases. Proc.
2nd IEEE Int. Conf. on Fuzzy Systems, pp 1241-1246,
1993.
[18] Lawrence O. Hall and Michael A. Pokorny:
Reinforcement Tuning of Fuzzy Rules: Proc. of the Annual
Conf. of the North American Fuzzy Information Processing
Society NAFIPS, pp 124-129, 1997.
[19] Tzung-Pei Hong and Chai-Ying Lee: Induction of
Fuzzy Rules and Membership Functions from Training
Examples. Fuzzy Sets and Systems, Vol 84, pp 33-47,
1996.
[20] Tzung-Pei Hong and Jyh-Bin Chen: Building a
Concise Decision Table for Fuzzy Rule Induction. Proc. of
the IEEE Int. Conf. on Fuzzy Systems, Vol 2, pp 997-1002,
1998.
[21] Lu Jun and Hua Keqiang and Li Dianpu and Li
Baoquan: Auto-Generation of Fuzzy Control Rule Base.
Proc. of the IEEE Int. Conf. on Intelligent Process.
Systems, pp 247-251, 1997.
[22] Timothy M. McKinney and Nasser Kehtarnavaz:
Fuzzy Rule Generation Via Multi-Scale Clustering. Proc.
of the IEEE Int. Conf. on Systems, Man and Cybern., Vol
4, pp 3182-3187, 1997.
[23] L. Mikhailov and A. Nabout and A. Lekova and F.
Fischer and H.A. Nour Eldin: Method for Fuzzy Rules
Extraction from Numerical Data. Proc. of the IEEE Int.
Symp. on Intelligent Control, pp 61-65, 1997.
131
[24] Shounak Roychowdhury and Bo-Hyeun Wang:
Measuring Inconsistency in Fuzzy Rules. Proc. of the
IEEE Int. Conf. on Fuzzy Systems, Vol. 2, pp 1020-1025,
1998.
[25] Magne Setnes and Robert Babuska and Uzay Kaymak
and Hans R. Van Nauta Lemke: Similarity Measures in
Fuzzy Rule Base Simplification. IEEE Trans. on Systems,
Man, and Cybern., Vol. 28, n 3, pp 376-386, 1998
[26] Thomas Sudkamp: Similarity, Interpolation, and
Fuzzy Rule Construction. Fuzzy Sets and Systems, Vol. 58,
n 1, pp 73-86, 1993.
[27] Jian Wang and Li Shen Wang and Ju-Fen Chao: An
Efficient Method of Fuzzy Rules Generation. Proc. of the
IEEE Int. Conf. on Intelligent Processing Systems, ICIPS,
Vol. 1, 295-199, 1997.
Você também pode gostar
- Apostila de Mecanica Das RochasDocumento205 páginasApostila de Mecanica Das RochasAlex Duarte71% (7)
- P2-2014 - 2 IedoDocumento5 páginasP2-2014 - 2 IedoLuiz MauricioAinda não há avaliações
- Fispq Nitrogenio - White Martins PDFDocumento11 páginasFispq Nitrogenio - White Martins PDFJunin_15Ainda não há avaliações
- Dicas Sobre Matrizes e Deter Min AntesDocumento15 páginasDicas Sobre Matrizes e Deter Min Anteslogusmao100% (1)
- Manual XML Demonstracoes Financeiras Padronizadas V2 Publicacao Setembro 2011Documento17 páginasManual XML Demonstracoes Financeiras Padronizadas V2 Publicacao Setembro 2011Keite ClembetAinda não há avaliações
- Comercial - EneagramaDocumento11 páginasComercial - EneagramaRichard FontelesAinda não há avaliações
- Impacto Aquisição BB e Nossa Caixa EstudoDocumento11 páginasImpacto Aquisição BB e Nossa Caixa EstudoAlcyon RicardoAinda não há avaliações
- Reflexão UFCD 10065 - Ana CoimbraDocumento4 páginasReflexão UFCD 10065 - Ana CoimbraAna Coimbra100% (2)
- Kant e São Tomás de AquinoDocumento6 páginasKant e São Tomás de AquinoPablo CanovasAinda não há avaliações
- Reconstrução Da Realidade Nas Ciências Sociais - Florestan FernandesDocumento10 páginasReconstrução Da Realidade Nas Ciências Sociais - Florestan FernandesjairpopperAinda não há avaliações
- Exercício de Ativação e Alinhamento Dos ChakrasDocumento6 páginasExercício de Ativação e Alinhamento Dos Chakrasiago9440% (1)
- A Galaxia de GutenbergDocumento12 páginasA Galaxia de GutenbergPatricia Raquel Gomes100% (1)
- TemperamentoDocumento8 páginasTemperamentoKATRIELYAinda não há avaliações
- Arquitetura MVCDocumento2 páginasArquitetura MVCThiago ReisAinda não há avaliações
- Abnt - NBR 10156 NB 1106 - Desinfeccao de Tubulacoes de Sistema Publico de Abastecimento de AguaDocumento6 páginasAbnt - NBR 10156 NB 1106 - Desinfeccao de Tubulacoes de Sistema Publico de Abastecimento de Aguasimonschneider100% (2)
- Mensagens11 NL CriteriosCorrecao Teste 2 DominiosDocumento17 páginasMensagens11 NL CriteriosCorrecao Teste 2 DominiosrsfernandesAinda não há avaliações
- NIT Diois 19 - 12Documento48 páginasNIT Diois 19 - 12mlpradines100% (1)
- Medida Da Resistência Do Circuito de TerraDocumento13 páginasMedida Da Resistência Do Circuito de TerraJoao Miguel SilvaAinda não há avaliações
- Arida e Lara Rezende - Inflação Inercial e Reforma MonetáriaDocumento26 páginasArida e Lara Rezende - Inflação Inercial e Reforma MonetáriaMarcelo PignatariAinda não há avaliações
- Apostila Educação PatrimonialDocumento30 páginasApostila Educação PatrimonialCarine AraújoAinda não há avaliações
- Lista Jumper Uel 2018 - 2013-Meiodia-ProntocompletoDocumento16 páginasLista Jumper Uel 2018 - 2013-Meiodia-ProntocompletoRicardoAmaralAinda não há avaliações
- Tribunal Penal Internacionalpdf Nodrm NodrmDocumento302 páginasTribunal Penal Internacionalpdf Nodrm NodrmJugreen MatosAinda não há avaliações
- Ética Profissional e Psicologia - Desafios Da ProfissãoDocumento4 páginasÉtica Profissional e Psicologia - Desafios Da ProfissãofelipefernandesdelimAinda não há avaliações
- Introdução - ConclusãoDocumento3 páginasIntrodução - ConclusãoLucas Fernandes0% (3)
- Atividade Avaliativa - 1Documento2 páginasAtividade Avaliativa - 1joelma0707100% (1)
- Latina Iluminação Apresentação PDFDocumento13 páginasLatina Iluminação Apresentação PDFS10 H2eAinda não há avaliações
- Referencial Teórico TCC IfesDocumento2 páginasReferencial Teórico TCC IfesMárcioCReisAinda não há avaliações
- Xavier - Letramento-Digital PDFDocumento10 páginasXavier - Letramento-Digital PDFLuiz Rosalvo CostaAinda não há avaliações
- Ie02 Manual de Aterramento EletricoDocumento20 páginasIe02 Manual de Aterramento EletricotiagoorgadoAinda não há avaliações
- Normas Projetos Basicos Estab SaudeDocumento141 páginasNormas Projetos Basicos Estab Saudeultramail7209Ainda não há avaliações