Você também pode gostar
- PROVA de Geografia e Historia 1º Bim 4º Ano PDFDocumento3 páginasPROVA de Geografia e Historia 1º Bim 4º Ano PDFLilian Ribeiro da SilvaAinda não há avaliações
- Lista 1 - Revisão OrgânicaDocumento2 páginasLista 1 - Revisão OrgânicaKauêMonteiroAinda não há avaliações
- MOEDASDocumento4 páginasMOEDASwggonzagaAinda não há avaliações
- Catalogo SomarDocumento32 páginasCatalogo SomarGiovani Farias100% (3)
- Prova Metrologia PDFDocumento1 páginaProva Metrologia PDFJonathas Silva100% (1)
- 019 Cap FC3 Exerc. ComplDocumento4 páginas019 Cap FC3 Exerc. ComplThiago Oliveira Jucá VasconcelosAinda não há avaliações
- Marcha Analitica Dos CationsDocumento10 páginasMarcha Analitica Dos CationsMariErculanoAinda não há avaliações
- ReologiaDocumento9 páginasReologiaArtur LaertAinda não há avaliações
- Instalaçao de AvesDocumento38 páginasInstalaçao de AvesLeonardo CassolaAinda não há avaliações
- Aula MetrologiaDocumento9 páginasAula MetrologiaDANIEL FELIPE JIMENEZ MONTEIROAinda não há avaliações
- TARDIFF - Saberes Docentes - Introdução PDFDocumento10 páginasTARDIFF - Saberes Docentes - Introdução PDFTeresinha SaraivaAinda não há avaliações
- Reintech - MOD. LRT - H 12.0Documento69 páginasReintech - MOD. LRT - H 12.0DouglasAinda não há avaliações
- Ic523-Lista Muros PDFDocumento4 páginasIc523-Lista Muros PDFRodrigo CardosoAinda não há avaliações
- Força de AtritoDocumento4 páginasForça de AtritoPedro HenriqueAinda não há avaliações
- Termologia 1Documento4 páginasTermologia 1patrick1984Ainda não há avaliações
- Manual Do Usuario Cassete 4 Vias Carrier Inverter ConnectDocumento36 páginasManual Do Usuario Cassete 4 Vias Carrier Inverter ConnectCassio Soares de SáAinda não há avaliações
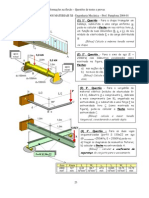
- Q - Questoes Deformacoes Na Flexao - CompacDocumento10 páginasQ - Questoes Deformacoes Na Flexao - CompacJorlando0% (1)
- 1 - Refrigeração - HistóricoDocumento107 páginas1 - Refrigeração - HistóricoJeanRosaOliveiraAinda não há avaliações
- Mecanismos Da Reação de DegradaçãoDocumento24 páginasMecanismos Da Reação de Degradaçãoabkraszczuk100% (1)
- Lista de Exercícios - Sistemas DigitaisDocumento9 páginasLista de Exercícios - Sistemas DigitaisAnaBeatrizPimentaAinda não há avaliações
- Resposta Dos Exercicios - Sensores Industriais - Fundamentos e AplicaçõesDocumento19 páginasResposta Dos Exercicios - Sensores Industriais - Fundamentos e AplicaçõesAntonio Pereira0% (1)
- Capacidade Termica MassicaDocumento4 páginasCapacidade Termica MassicaMariana BarrosAinda não há avaliações
- ZenenergyDocumento100 páginasZenenergyyaqui.ana6864Ainda não há avaliações
- Cross Operacional PDFDocumento20 páginasCross Operacional PDFNadiaAinda não há avaliações
- EV-3º Ciclo-Planificação-09-10Documento5 páginasEV-3º Ciclo-Planificação-09-10vituperarAinda não há avaliações
- Servo MecanismoDocumento216 páginasServo MecanismopedrocvspAinda não há avaliações
- Concreto Armado, Vigaas e LajesDocumento19 páginasConcreto Armado, Vigaas e Lajesolismar1Ainda não há avaliações
- Acepe AbobadilhasDocumento2 páginasAcepe AbobadilhasxxixxussAinda não há avaliações
- Restauracoes de Classe III e IV Com Resina - AulaDocumento45 páginasRestauracoes de Classe III e IV Com Resina - AulaLuiz LuizAinda não há avaliações
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNo EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNota: 5 de 5 estrelas5/5 (3)
- Modelos De Laudos Para Avaliação De Imóveis Urbanos E RuraisNo EverandModelos De Laudos Para Avaliação De Imóveis Urbanos E RuraisAinda não há avaliações
- ABC da topografia: para tecnólogos, arquitetos e engenheirosNo EverandABC da topografia: para tecnólogos, arquitetos e engenheirosAinda não há avaliações
- Roadmap back-end: Conhecendo o protocolo HTTP e arquiteturas RESTNo EverandRoadmap back-end: Conhecendo o protocolo HTTP e arquiteturas RESTNota: 4.5 de 5 estrelas4.5/5 (2)
- Trading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaNo EverandTrading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaNota: 5 de 5 estrelas5/5 (1)
- Comandos ElétricosNo EverandComandos ElétricosAinda não há avaliações
- Liberdade digital: O mais completo manual para empreender na internet e ter resultadosNo EverandLiberdade digital: O mais completo manual para empreender na internet e ter resultadosNota: 5 de 5 estrelas5/5 (10)
- O Marketing Digital E As Diversas Ferramentas Que Podem Facilitar O Trabalho On-lineNo EverandO Marketing Digital E As Diversas Ferramentas Que Podem Facilitar O Trabalho On-lineAinda não há avaliações