Você também pode gostar
- Treino completo para peito, costas, bíceps e pernasDocumento2 páginasTreino completo para peito, costas, bíceps e pernasIgorFernandesPinheiro100% (3)
- Especificações IvecoDocumento2 páginasEspecificações Ivecomanoel bernardo netoAinda não há avaliações
- NBR 14518 - Sistema de Ventilação para Cozinhas IndustriaisDocumento25 páginasNBR 14518 - Sistema de Ventilação para Cozinhas IndustriaisAnna Cristina100% (5)
- NBR 14518 - Sistema de Ventilação para Cozinhas IndustriaisDocumento25 páginasNBR 14518 - Sistema de Ventilação para Cozinhas IndustriaisAnna Cristina100% (5)
- Catalogo VedabrasDocumento548 páginasCatalogo Vedabrasblasinho1000100% (2)
- Educação Física e Desporto Escolar em MoçambiqueDocumento15 páginasEducação Física e Desporto Escolar em MoçambiqueTavane Vasco Vasco MabundaAinda não há avaliações
- Fundamentos do FutsalDocumento4 páginasFundamentos do Futsaljb.867% (3)
- ChavetaDocumento17 páginasChavetaMatheus BordignonAinda não há avaliações
- ChavetaDocumento1 páginaChavetaMatheus BordignonAinda não há avaliações
- A Importancia Do Gerenciamento de Riscos em ProjetosDocumento11 páginasA Importancia Do Gerenciamento de Riscos em ProjetosMatheus BordignonAinda não há avaliações
- UP Language ConsultantsDocumento1 páginaUP Language ConsultantsMatheus BordignonAinda não há avaliações
- Chaveta PDFDocumento1 páginaChaveta PDFMatheus BordignonAinda não há avaliações
- VirtualHandout - 5781 - FB5781-V - Como Criar e Publicar Seus Perfis No InventorDocumento15 páginasVirtualHandout - 5781 - FB5781-V - Como Criar e Publicar Seus Perfis No InventorCarlos Magno PeterleAinda não há avaliações
- Pino de BarraDocumento1 páginaPino de BarraMatheus BordignonAinda não há avaliações
- Pmoc Apresentacao Plano de Manutencao Operacao e ControleDocumento17 páginasPmoc Apresentacao Plano de Manutencao Operacao e ControleTiago AugustoAinda não há avaliações
- Controle de EstudosDocumento21 páginasControle de EstudosFernando KastroAinda não há avaliações
- Controle de EstudosDocumento21 páginasControle de EstudosFernando KastroAinda não há avaliações
- Projeto de Uma TalhaDocumento1 páginaProjeto de Uma TalhaMatheus BordignonAinda não há avaliações
- GPSimDocumento46 páginasGPSimMatheus BordignonAinda não há avaliações
- INICIAÇÃODocumento2 páginasINICIAÇÃOMatheus BordignonAinda não há avaliações
- Energia Eólica - MQT2 - Matheus BordignonDocumento9 páginasEnergia Eólica - MQT2 - Matheus BordignonMatheus BordignonAinda não há avaliações
- FABRICADECHOCOLATEDocumento11 páginasFABRICADECHOCOLATE758513Ainda não há avaliações
- Receitas de clubes de futebol crescem mais que economias globaisDocumento22 páginasReceitas de clubes de futebol crescem mais que economias globaisjoserodrigomachadoalAinda não há avaliações
- Resultados 10º Atividade Trocador de Calor 3Documento14 páginasResultados 10º Atividade Trocador de Calor 3Matheus BordignonAinda não há avaliações
- Buckshot Roulette RPGDocumento11 páginasBuckshot Roulette RPGrosasescarlatesAinda não há avaliações
- The Return of The Lazy Dungeon Master - Traduzido em PT-BR - PDF - Jogos de RPG - TempoDocumento1 páginaThe Return of The Lazy Dungeon Master - Traduzido em PT-BR - PDF - Jogos de RPG - TempoPedroGamer EitaFunkAinda não há avaliações
- Calendário mensalDocumento2 páginasCalendário mensalGsloca LocaAinda não há avaliações
- As Rosas Não FalamDocumento5 páginasAs Rosas Não FalamErickson NunesAinda não há avaliações
- Amor Ensina - Alfabetizar Com AmorDocumento5 páginasAmor Ensina - Alfabetizar Com Amorweevil underwoodAinda não há avaliações
- Abcde Grau 2Documento1 páginaAbcde Grau 2jhonny_stzAinda não há avaliações
- SISTEMA MuscularDocumento2 páginasSISTEMA MuscularPatricia HerbsterAinda não há avaliações
- Motor de partida 1.0L e 1.6L Zetec RoCam FlexDocumento5 páginasMotor de partida 1.0L e 1.6L Zetec RoCam FlexIomar SousaAinda não há avaliações
- Campeonato de Vôlei de CrateúsDocumento7 páginasCampeonato de Vôlei de CrateúsCarlos RamonAinda não há avaliações
- Análisis de características de vehículosDocumento20 páginasAnálisis de características de vehículosLaura MendozaAinda não há avaliações
- Futsal-Sumula SVP 2023Documento1 páginaFutsal-Sumula SVP 2023MuriloAinda não há avaliações
- Ficha de Agente VirgilioDocumento2 páginasFicha de Agente VirgilioMarcelo Henrique VieiraAinda não há avaliações
- Action Verbs Exercicio para Todas As TurmasDocumento3 páginasAction Verbs Exercicio para Todas As TurmasWendell BorgesAinda não há avaliações
- Análise estética da série Stranger ThingsDocumento3 páginasAnálise estética da série Stranger Thingsrafaelle santosAinda não há avaliações
- Lista de exercícios de polígonosDocumento1 páginaLista de exercícios de polígonosLoremna ValesAinda não há avaliações
- 1553537984lista MPP - ESSA - ProbabilidadeDocumento6 páginas1553537984lista MPP - ESSA - ProbabilidadeCelso MoslecAinda não há avaliações
- Atividade de Matemática Multiplicaçao de Dois NúmerosDocumento8 páginasAtividade de Matemática Multiplicaçao de Dois NúmerosLuiza Helena Pinto MacielAinda não há avaliações
- Projeto Integrador - MMADocumento7 páginasProjeto Integrador - MMASara SamaraAinda não há avaliações
- Massagem Desportiva - Tudo Por Uma MassagemDocumento2 páginasMassagem Desportiva - Tudo Por Uma MassagemEduardo CerqueiraAinda não há avaliações
- Andebol: Progressão pedagógica para o 1o objetivoDocumento8 páginasAndebol: Progressão pedagógica para o 1o objetivoBruno PinheiroAinda não há avaliações
- 3 Serie - Ed - Física - TRILHA - Semana 12Documento4 páginas3 Serie - Ed - Física - TRILHA - Semana 12inove CellAinda não há avaliações
- Introdução Ao Pensamento Contemporâneo - RacismoDocumento8 páginasIntrodução Ao Pensamento Contemporâneo - RacismoDiogo PedrosaAinda não há avaliações
- Como Instalar Elgin I8Documento2 páginasComo Instalar Elgin I8Victor AquinoAinda não há avaliações
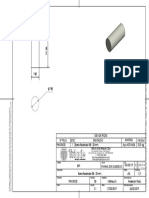
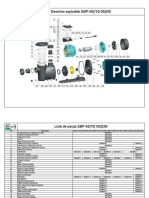
- União Bomba EBP EBP-50-75-100-200Documento2 páginasUnião Bomba EBP EBP-50-75-100-200Comercial ACME SOLARAinda não há avaliações
- 55 - Após 24 Anos Acharam A Única Rom Da Versão Cancelada de Rayman para Super NES!Documento9 páginas55 - Após 24 Anos Acharam A Única Rom Da Versão Cancelada de Rayman para Super NES!Ivan SouzaAinda não há avaliações
- Livro Das Trevas Vis - Itens Mágicos - D&D AlémDocumento2 páginasLivro Das Trevas Vis - Itens Mágicos - D&D Alémz7vfdh2cvpAinda não há avaliações