Você também pode gostar
- Aula01 ESTA 008 17 v1 PDFDocumento42 páginasAula01 ESTA 008 17 v1 PDFTiago BritoAinda não há avaliações
- Aula00 B ESTA 008 17 v1 PDFDocumento26 páginasAula00 B ESTA 008 17 v1 PDFTiago BritoAinda não há avaliações
- Aula03 ESTA008 17 v1 PDFDocumento108 páginasAula03 ESTA008 17 v1 PDFTiago BritoAinda não há avaliações
- Lista 2 - Resolução PDFDocumento6 páginasLista 2 - Resolução PDFTiago BritoAinda não há avaliações
- Lista 3 - Resolução PDFDocumento9 páginasLista 3 - Resolução PDFTiago BritoAinda não há avaliações
- Lista 5 - ResoluçãoDocumento7 páginasLista 5 - ResoluçãoTiago BritoAinda não há avaliações
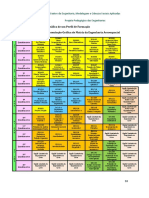
- Grade-Matriz Curricular Aeroespacial 2013Documento1 páginaGrade-Matriz Curricular Aeroespacial 2013Tiago BritoAinda não há avaliações
- Curso de Fibra ÓpticaDocumento186 páginasCurso de Fibra ÓpticaArthur Magalhaes100% (4)
- Teste Sensor de VelocidadeDocumento7 páginasTeste Sensor de VelocidadeAnderson gonçalvesAinda não há avaliações
- Manual Dobragem de TubosDocumento18 páginasManual Dobragem de TubosFilipe Coimbra100% (2)
- Sistema CS ScaniaDocumento30 páginasSistema CS Scaniaedivaldo3veronese97% (32)
- Roteiro para Elaboração de Projeto de Irrigação Por AspersãoDocumento5 páginasRoteiro para Elaboração de Projeto de Irrigação Por Aspersãotayris lucasAinda não há avaliações
- Curso de SigilosDocumento37 páginasCurso de Sigilosdistopia699100% (5)
- Determinação de Cloro Ativo em AlvejanteDocumento3 páginasDeterminação de Cloro Ativo em Alvejantefabom007Ainda não há avaliações
- Eixo Traseiro RS-220 230 240Documento136 páginasEixo Traseiro RS-220 230 240dieg.reisdosanjos4Ainda não há avaliações
- 2018 Grelha Curricular Curso EstatisticaDocumento4 páginas2018 Grelha Curricular Curso EstatisticaManuel LuisAinda não há avaliações
- Lista de Exercc3adcios Progressc3a3o Aritmc3a9tica1Documento3 páginasLista de Exercc3adcios Progressc3a3o Aritmc3a9tica1Anna BorgesAinda não há avaliações
- 3 - A Medida Do Tempo e A Idade Da TerraDocumento37 páginas3 - A Medida Do Tempo e A Idade Da TerraAliceAinda não há avaliações
- Resumo Das Regras Do Silogismo-LibreDocumento5 páginasResumo Das Regras Do Silogismo-LibreFernando BarsottiAinda não há avaliações
- Fração GeratrizDocumento4 páginasFração GeratrizMateus MonedeiroAinda não há avaliações
- Quimica 11 ClasseDocumento154 páginasQuimica 11 ClasseDann Santiago100% (2)
- mr710 Isvbun 330 24vDocumento1 páginamr710 Isvbun 330 24vM&M ASSOCIADOSAinda não há avaliações
- Atividade Parte 3Documento4 páginasAtividade Parte 3Marcos Antonio SantosAinda não há avaliações
- Lei Da Gravitação UniversalDocumento13 páginasLei Da Gravitação UniversalNagilson SousaAinda não há avaliações
- Exercícios de Cálculo 1Documento2 páginasExercícios de Cálculo 1Arthur BarcellosAinda não há avaliações
- Avaliação Formativa de Novembro - Mat 4º AnoDocumento4 páginasAvaliação Formativa de Novembro - Mat 4º AnoJorgeAinda não há avaliações
- Volumetria Ácido-Base EXPDocumento11 páginasVolumetria Ácido-Base EXPJamanaAinda não há avaliações
- Teste Avaliacao 5ano NOV16Documento5 páginasTeste Avaliacao 5ano NOV16paulaAinda não há avaliações
- 8puzzle A Estrela LispDocumento7 páginas8puzzle A Estrela LispLeonardo RubimAinda não há avaliações
- Geometria 6º AnoDocumento4 páginasGeometria 6º AnoWhesley Campos SousaAinda não há avaliações
- Aula N°1-Introdução EstatísticaDocumento5 páginasAula N°1-Introdução EstatísticaCarlos HijazinAinda não há avaliações
- Manual de Operação e Manutenção - H120Documento68 páginasManual de Operação e Manutenção - H120Victor FernandesAinda não há avaliações
- LogaritimoDocumento36 páginasLogaritimoJunior FlavioAinda não há avaliações
- 1-Dados Do Contratante 2 - Instrumento/Equipamento CalibradoDocumento4 páginas1-Dados Do Contratante 2 - Instrumento/Equipamento CalibradoEdjenn Brito de Oliveira SantosAinda não há avaliações
- Exercicios Resolvidos - Eletricidade - F PDFDocumento43 páginasExercicios Resolvidos - Eletricidade - F PDFMarcela BorgesAinda não há avaliações
- Física - Pré-Vestibular Dom Bosco - Gab-Fis1-Ex5Documento8 páginasFísica - Pré-Vestibular Dom Bosco - Gab-Fis1-Ex5Física Caderno de Resoluções100% (2)
- Lista de Exercícios 3Documento3 páginasLista de Exercícios 3Anne Caroline De Paula NascimentoAinda não há avaliações