Você também pode gostar
- Programando A Placa Arduino Uno Em Basic Com Base No BascomNo EverandProgramando A Placa Arduino Uno Em Basic Com Base No BascomAinda não há avaliações
- Monitorando Um Amperímetro Trifásico No Arduino Com Sintetizador De Voz Programado No PythonNo EverandMonitorando Um Amperímetro Trifásico No Arduino Com Sintetizador De Voz Programado No PythonAinda não há avaliações
- Desenvolvendo Um Datalogger Para Amperímetro Trifásico Com ArduinoNo EverandDesenvolvendo Um Datalogger Para Amperímetro Trifásico Com ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger Em Vc# E Armazenando No Arquivo Formato Csv Para Monitoramento De Voltímetro Usando O Esp8266 (nodemcu) Programado No ArduinoNo EverandDesenvolvendo Um Datalogger Em Vc# E Armazenando No Arquivo Formato Csv Para Monitoramento De Voltímetro Usando O Esp8266 (nodemcu) Programado No ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger Em Vb E Armazenando No Arquivo Formato Csv Para Monitoramento De Voltímetro Usando O Esp8266 (nodemcu) Programado No ArduinoNo EverandDesenvolvendo Um Datalogger Em Vb E Armazenando No Arquivo Formato Csv Para Monitoramento De Voltímetro Usando O Esp8266 (nodemcu) Programado No ArduinoAinda não há avaliações
- Reproduzindo A Música De Anton Bruckner Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Anton Bruckner Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De Maciej Kamieński Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Maciej Kamieński Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De Max Bruch Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Max Bruch Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger Para Medir Amperímetro Com Esp8266 Programado No ArduinoNo EverandDesenvolvendo Um Datalogger Para Medir Amperímetro Com Esp8266 Programado No ArduinoAinda não há avaliações
- Desenvolvendo Um Web Server Para Monitorar Concentração De H2 Em Modo Ap Usando O Esp8266 (nodemcu) Programado No ArduinoNo EverandDesenvolvendo Um Web Server Para Monitorar Concentração De H2 Em Modo Ap Usando O Esp8266 (nodemcu) Programado No ArduinoAinda não há avaliações
- Reproduzindo A Música De Niccolò Paganini Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Niccolò Paganini Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger Em Vc# E Armazenando No Arquivo Formato Csv Para Monitoramento De Higrômetro Usando O Esp8266 (nodemcu) Programado No ArduinoNo EverandDesenvolvendo Um Datalogger Em Vc# E Armazenando No Arquivo Formato Csv Para Monitoramento De Higrômetro Usando O Esp8266 (nodemcu) Programado No ArduinoAinda não há avaliações
- Reproduzindo Música Clássica De Tomaso Albinoni Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo Música Clássica De Tomaso Albinoni Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger Em Vc# E Armazenando No Arquivo Formato Csv Para Monitoramento De Gaussímetro Usando O Esp8266 (nodemcu) Programado No ArduinoNo EverandDesenvolvendo Um Datalogger Em Vc# E Armazenando No Arquivo Formato Csv Para Monitoramento De Gaussímetro Usando O Esp8266 (nodemcu) Programado No ArduinoAinda não há avaliações
- Programando A Placa Arduino Uno Em Assembly Com Base No Avr StudioNo EverandProgramando A Placa Arduino Uno Em Assembly Com Base No Avr StudioAinda não há avaliações
- Desenvolvendo Um Datalogger Para Medir Barômetro Com Esp8266 Programado No ArduinoNo EverandDesenvolvendo Um Datalogger Para Medir Barômetro Com Esp8266 Programado No ArduinoAinda não há avaliações
- Reproduzindo A Música De Joaquim Callado Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Joaquim Callado Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De Antoine Dauvergne Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Antoine Dauvergne Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De Domenico Scarlatti Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Domenico Scarlatti Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger Para Medir Fluxo De Massa Com Esp8266 Programado No ArduinoNo EverandDesenvolvendo Um Datalogger Para Medir Fluxo De Massa Com Esp8266 Programado No ArduinoAinda não há avaliações
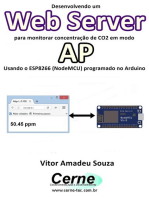
- Desenvolvendo Um Web Server Para Monitorar Concentração De Co2 Em Modo Ap Usando O Esp8266 (nodemcu) Programado No ArduinoNo EverandDesenvolvendo Um Web Server Para Monitorar Concentração De Co2 Em Modo Ap Usando O Esp8266 (nodemcu) Programado No ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger Em Vb E Armazenando No Arquivo Formato Csv Para Monitoramento De Barômetro Usando O Esp8266 (nodemcu) Programado No ArduinoNo EverandDesenvolvendo Um Datalogger Em Vb E Armazenando No Arquivo Formato Csv Para Monitoramento De Barômetro Usando O Esp8266 (nodemcu) Programado No ArduinoAinda não há avaliações
- Reproduzindo A Música De Claude Debussy Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Claude Debussy Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De Bedřich Smetana Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Bedřich Smetana Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De Antonín Dvořák Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Antonín Dvořák Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Acelerômetro Com O Sensor Mx2125 Programado No ArduinoNo EverandAcelerômetro Com O Sensor Mx2125 Programado No ArduinoAinda não há avaliações
- Reproduzindo A Música De César Franck Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De César Franck Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger Em Vb E Armazenando No Arquivo Formato Csv Para Monitoramento De Higrômetro Usando O Esp8266 (nodemcu) Programado No ArduinoNo EverandDesenvolvendo Um Datalogger Em Vb E Armazenando No Arquivo Formato Csv Para Monitoramento De Higrômetro Usando O Esp8266 (nodemcu) Programado No ArduinoAinda não há avaliações
- Reproduzindo A Música De Giorgio Mainerio Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Giorgio Mainerio Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Implementando Um Web Server Com Firewall Para Monitoramento De Co2 No Esp8266 Programado Em ArduinoNo EverandImplementando Um Web Server Com Firewall Para Monitoramento De Co2 No Esp8266 Programado Em ArduinoAinda não há avaliações
- Desenvolvendo Um Web Server Para Monitorar Dinamômetro Em Modo Ap Usando O Esp8266 (nodemcu) Programado No ArduinoNo EverandDesenvolvendo Um Web Server Para Monitorar Dinamômetro Em Modo Ap Usando O Esp8266 (nodemcu) Programado No ArduinoAinda não há avaliações
- Desenvolvendo Um Web Server Para Monitorar Fluxo De Massa Em Modo Ap Usando O Esp8266 (nodemcu) Programado No ArduinoNo EverandDesenvolvendo Um Web Server Para Monitorar Fluxo De Massa Em Modo Ap Usando O Esp8266 (nodemcu) Programado No ArduinoAinda não há avaliações
- Reproduzindo A Música De Jean-baptiste Krumpholz Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Jean-baptiste Krumpholz Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De Luigi Boccherini Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Luigi Boccherini Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Desenvolvendo Um Web Server Para Monitorar Radiação Uv Em Modo Ap Usando O Esp8266 (nodemcu) Programado No ArduinoNo EverandDesenvolvendo Um Web Server Para Monitorar Radiação Uv Em Modo Ap Usando O Esp8266 (nodemcu) Programado No ArduinoAinda não há avaliações
- Reproduzindo A Música De César Cui Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De César Cui Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De João Domingos Bomtempo Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De João Domingos Bomtempo Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De Marcos Portugal Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Marcos Portugal Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De Richard Wagner Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Richard Wagner Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De Gaspare Spontini Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Gaspare Spontini Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De Antonio Vivaldi Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Antonio Vivaldi Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Desenvolvendo Em App Inventor Para Android Um Supervisório Para Monitoramento De Amperímetro Usando O Esp8266 (nodemcu) Programado No ArduinoNo EverandDesenvolvendo Em App Inventor Para Android Um Supervisório Para Monitoramento De Amperímetro Usando O Esp8266 (nodemcu) Programado No ArduinoAinda não há avaliações
- Desenvolvendo Projetos De Monitoramento Com O Arduino E Smartphone Android Programado No App InventorNo EverandDesenvolvendo Projetos De Monitoramento Com O Arduino E Smartphone Android Programado No App InventorAinda não há avaliações
- Reproduzindo A Música De Leopold Mozart Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Leopold Mozart Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De Mikhail Glinka Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Mikhail Glinka Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Desenvolvendo Um Datalogger De Corrente Dc Com ArduinoNo EverandDesenvolvendo Um Datalogger De Corrente Dc Com ArduinoAinda não há avaliações
- Reproduzindo A Música De Charles Gounod Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Charles Gounod Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De Jacques Offenbach Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Jacques Offenbach Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De Vassili Kalinnikov Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Vassili Kalinnikov Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo Canto Gregoriano Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo Canto Gregoriano Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De Ludwig Van Beethoven Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Ludwig Van Beethoven Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De Robert Schumann Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Robert Schumann Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Reproduzindo A Música De Antonio Salieri Em Arquivo Wav Com Base No ArduinoNo EverandReproduzindo A Música De Antonio Salieri Em Arquivo Wav Com Base No ArduinoAinda não há avaliações
- Curso Básico de ArduinoDocumento244 páginasCurso Básico de ArduinoJakson67% (3)
- 3828A20877FDocumento20 páginas3828A20877FVictor Hugo Da Silva FariasAinda não há avaliações
- Associação Dos Prod Rurais de DracenaDocumento1 páginaAssociação Dos Prod Rurais de Dracenadouglas cardoso da silvaAinda não há avaliações
- AquaponiaDocumento60 páginasAquaponiadouglas cardoso da silvaAinda não há avaliações
- Comprovante Do Pagamento 1/2Documento2 páginasComprovante Do Pagamento 1/2douglas cardoso da silvaAinda não há avaliações
- Modelo de Roteiro (42Documento1 páginaModelo de Roteiro (42douglas cardoso da silvaAinda não há avaliações
- 9º Ano Aula de 10 A 14-08Documento2 páginas9º Ano Aula de 10 A 14-08douglas cardoso da silva100% (1)
- Atividade 1 - 10-08-20 - 6 AnoDocumento1 páginaAtividade 1 - 10-08-20 - 6 Anodouglas cardoso da silvaAinda não há avaliações
- GP 78Documento23 páginasGP 78ghiocasAinda não há avaliações
- Manual Wifi CamDocumento16 páginasManual Wifi CamhelveciotfAinda não há avaliações
- Construção Tanque Ferro Cimento-1Documento14 páginasConstrução Tanque Ferro Cimento-1douglas cardoso da silva100% (6)
- Projeto TelescopioDocumento69 páginasProjeto TelescopioThunderstormAinda não há avaliações
- Tabela de Regulagem Carburadores BROSOLDocumento78 páginasTabela de Regulagem Carburadores BROSOLMelsi Maran75% (59)
- Fogão A Lenha Sem Fumaça (UFV)Documento0 páginaFogão A Lenha Sem Fumaça (UFV)Artur Fernandes100% (1)
- Conf UbiquitiDocumento9 páginasConf Ubiquitiluiz.teixeiraAinda não há avaliações
- FT897D PDFDocumento91 páginasFT897D PDFdouglas cardoso da silvaAinda não há avaliações
- Manual Contagiros Diesel PDFDocumento1 páginaManual Contagiros Diesel PDFdouglas cardoso da silvaAinda não há avaliações
- A9795840096 I 0418Documento256 páginasA9795840096 I 0418douglas cardoso da silva100% (1)
- Fundação Da Casa-1Documento1 páginaFundação Da Casa-1douglas cardoso da silvaAinda não há avaliações
- Roteiro 01 Sistemas Microprocessados 2023Documento12 páginasRoteiro 01 Sistemas Microprocessados 2023cijoAinda não há avaliações
- Teste DiagnosticoDocumento6 páginasTeste Diagnosticoeunicealbuquerque4638100% (1)
- Canvas emDocumento4 páginasCanvas emGLAUCIO DOS SANTOS SILVAAinda não há avaliações
- SEO Completo Curso Udemy 072018Documento82 páginasSEO Completo Curso Udemy 072018Azel CastroAinda não há avaliações
- 1.1 - Instalando o Cliente 3CXDocumento15 páginas1.1 - Instalando o Cliente 3CXLuiz Henrique Fernandes JuniorAinda não há avaliações
- 1º SIMULADO Língua Portuguesa RETA FINAL (SEE MG) 2023Documento20 páginas1º SIMULADO Língua Portuguesa RETA FINAL (SEE MG) 2023Jeiza Silva MonteiroAinda não há avaliações
- Regulamento - Processo Seletivo - 2024-2025 - V2 - 0403Documento21 páginasRegulamento - Processo Seletivo - 2024-2025 - V2 - 0403Beatriz AlvesAinda não há avaliações
- Apostila ChocolândiaDocumento6 páginasApostila ChocolândiaAruan Lopes ConstantinoAinda não há avaliações
- Manual de Exemplos para Licenciamento de Estações TerrenasDocumento68 páginasManual de Exemplos para Licenciamento de Estações TerrenasmarcusAinda não há avaliações
- Prática 10 - Eletrônica GeralDocumento6 páginasPrática 10 - Eletrônica GeralVictor HugoAinda não há avaliações
- Manual e SocialDocumento25 páginasManual e SocialStener T JrAinda não há avaliações
- Circo: NomeDocumento23 páginasCirco: NomeSelma MariaAinda não há avaliações
- Geoestatistica Motivacao e Conceitos Basicos PDFDocumento12 páginasGeoestatistica Motivacao e Conceitos Basicos PDFNyemer BaruelAinda não há avaliações
- NM 60335-1 - 2010 2edDocumento199 páginasNM 60335-1 - 2010 2edpomboeletronic100% (1)
- Aula 4 - Slides - Sérgio Johann FilhoDocumento119 páginasAula 4 - Slides - Sérgio Johann FilhoSabrina DantasAinda não há avaliações
- Instruções de Pagamento Pelo Internet Banking Ou CaixaDocumento1 páginaInstruções de Pagamento Pelo Internet Banking Ou Caixaribeiro 973Ainda não há avaliações
- Philco PH55X57DAG LED 3DDocumento20 páginasPhilco PH55X57DAG LED 3DAnselmo OliveiraAinda não há avaliações
- Apostila Fundamentos SIDocumento9 páginasApostila Fundamentos SIAndré SiqueiraAinda não há avaliações
- Assunto 4 - Bancos de Dados de Famílias de ColunasDocumento18 páginasAssunto 4 - Bancos de Dados de Famílias de ColunasGabriella CarolineAinda não há avaliações
- Exercício - Dimensões Da QualidadeDocumento5 páginasExercício - Dimensões Da QualidadeYgor SoaresAinda não há avaliações
- Tipos de Banco de Dados - Conheça Os Principais e Qual Deles É o Melhor Resposta 2Documento7 páginasTipos de Banco de Dados - Conheça Os Principais e Qual Deles É o Melhor Resposta 2Andr4med1Ainda não há avaliações
- Plano de Curso-DimasDocumento5 páginasPlano de Curso-DimasEvandro CostaAinda não há avaliações
- Projeto Filtro RLCDocumento17 páginasProjeto Filtro RLCwelberromero75% (4)
- G1 → Fechamento Inteligente FUNCIONA MESMO? - Depoimentos - Preço 【Tudo Que Você Precisa Saber】Documento8 páginasG1 → Fechamento Inteligente FUNCIONA MESMO? - Depoimentos - Preço 【Tudo Que Você Precisa Saber】Wellington SantosAinda não há avaliações
- Prova 7 Com GabaritoDocumento9 páginasProva 7 Com GabaritoEdson PeixotoAinda não há avaliações
- Semana 6 - Sistemas Lineares - Métodos ExatosDocumento52 páginasSemana 6 - Sistemas Lineares - Métodos ExatosDiogo Chadud MilagresAinda não há avaliações
- Apresentacao AngDocumento82 páginasApresentacao AngDavid DomingosAinda não há avaliações
- BR 1000 Line PT BRDocumento6 páginasBR 1000 Line PT BRCLECIO CARMOAinda não há avaliações
- Livro-Avanço RápidoDocumento19 páginasLivro-Avanço RápidoJefferson AlbuquerqueAinda não há avaliações
- AULA 1 - InTRODUÇÃO Matemática BásicaDocumento19 páginasAULA 1 - InTRODUÇÃO Matemática BásicaAna RaquelAinda não há avaliações