Você também pode gostar
- 1 ProvaaDocumento1 página1 ProvaaolgaAinda não há avaliações
- Aula14 LCDDocumento9 páginasAula14 LCDolgaAinda não há avaliações
- Aula 7 - Como Utilizar o Display LCD 16x2 - FilipeFlopDocumento5 páginasAula 7 - Como Utilizar o Display LCD 16x2 - FilipeFlopolgaAinda não há avaliações
- Aula 06 BUZINADocumento15 páginasAula 06 BUZINAolgaAinda não há avaliações
- Aula 05Documento15 páginasAula 05olgaAinda não há avaliações
- AULA03Documento8 páginasAULA03olgaAinda não há avaliações
- Aula 4 Info I Historia 2022Documento30 páginasAula 4 Info I Historia 2022olgaAinda não há avaliações
- Aulal Controle RemotoDocumento5 páginasAulal Controle RemotoolgaAinda não há avaliações
- Meriva Especificacoes TecnicasDocumento131 páginasMeriva Especificacoes TecnicasGabriel ReisAinda não há avaliações
- GSX-S750A/ZA: Manual Do ProprietárioDocumento42 páginasGSX-S750A/ZA: Manual Do ProprietárioThiago BritesAinda não há avaliações
- Lista Empilhadeira Nov-2013Documento2 páginasLista Empilhadeira Nov-2013ALCIMAR ANGELO CONSALTER MEAinda não há avaliações
- Gradadores - Guilherme Laluci e Henrique MamedeDocumento32 páginasGradadores - Guilherme Laluci e Henrique MamedeVítor Dias JavornikAinda não há avaliações
- R3 1-1MANUAL SFAVE CELTA 2P e 4P DIA PST BOSCH PDFDocumento2 páginasR3 1-1MANUAL SFAVE CELTA 2P e 4P DIA PST BOSCH PDFLuizao CarlosAinda não há avaliações
- Check ListDocumento3 páginasCheck ListPaulo HenriqueAinda não há avaliações
- Folder MS RacingDocumento4 páginasFolder MS RacingMARIPAAinda não há avaliações
- Diodo ZenerDocumento6 páginasDiodo ZenerGleison PrateadoAinda não há avaliações
- Informações VolvoDocumento22 páginasInformações VolvoWelley100% (1)
- Motoniveladora Cat 120kDocumento963 páginasMotoniveladora Cat 120kSECRETARIA OBRAS100% (1)
- Como Usar o Multimetro AnalógicoDocumento12 páginasComo Usar o Multimetro AnalógicoAvô ViegasAinda não há avaliações
- Suspençao Gol G IVDocumento195 páginasSuspençao Gol G IVFernando Pucharelli de Santana100% (1)
- Manuais-Mercedes Bens Br-Mercedes Benz Caminhao L 318 Catalogo PDFDocumento2 páginasManuais-Mercedes Bens Br-Mercedes Benz Caminhao L 318 Catalogo PDFMaicon Picolo50% (6)
- Manual Centarl TelefônicaDocumento157 páginasManual Centarl TelefônicaPaula FerreiraAinda não há avaliações
- Lista SanlightDocumento5 páginasLista SanlightWuilver OjedaAinda não há avaliações
- Consumo de Combustível Padrão (Modelo)Documento11 páginasConsumo de Combustível Padrão (Modelo)ScribdTranslationsAinda não há avaliações
- InformáticaDocumento101 páginasInformáticaFrancielly RochaAinda não há avaliações
- Ensaio Motor CC PDFDocumento35 páginasEnsaio Motor CC PDFRogérioPaganiniValentini100% (4)
- Painel de Controle Remota 01 (Leito) - As BuiltsDocumento44 páginasPainel de Controle Remota 01 (Leito) - As BuiltsSolange Antonio CarlosAinda não há avaliações
- Atego 1726 4x4 Plataforma V1Documento2 páginasAtego 1726 4x4 Plataforma V1Anderson Sousa100% (2)
- Plano de Manutenção BBEDocumento2 páginasPlano de Manutenção BBEAndre WillianAinda não há avaliações
- Placa Fémur ProximalDocumento15 páginasPlaca Fémur ProximalRosmery AngelAinda não há avaliações
- Talha Catraca GeralDocumento2 páginasTalha Catraca GeralantonyAinda não há avaliações
- SE130Documento84 páginasSE130g30.mirandaAinda não há avaliações
- Exercicios Trans Potencia 2018Documento1 páginaExercicios Trans Potencia 2018JOSIELLE NUNES SILVAAinda não há avaliações
- Funções Básicas de Um Diodo (Chaveamento e Retificação de Meia Onda)Documento3 páginasFunções Básicas de Um Diodo (Chaveamento e Retificação de Meia Onda)Jayane GondimAinda não há avaliações
- Exercícios Sobre Aparelhos de Elevação e TransporteDocumento164 páginasExercícios Sobre Aparelhos de Elevação e Transportelqueiroz737Ainda não há avaliações
- 50 Questoes Do Windows XP Professional (50 Questões de Windows XP Professional)Documento7 páginas50 Questoes Do Windows XP Professional (50 Questões de Windows XP Professional)Rodrigo Duarte86% (7)
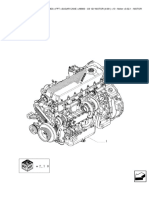
- Catalogo de Peças Iveco C9Documento117 páginasCatalogo de Peças Iveco C9Carlos MacarioAinda não há avaliações
- Arquitetura e Organização de Computadores 3Documento31 páginasArquitetura e Organização de Computadores 3JoveniAlvesAinda não há avaliações
- Fundamentos de Segurança da Informação: com base na ISO 27001 e na ISO 27002No EverandFundamentos de Segurança da Informação: com base na ISO 27001 e na ISO 27002Nota: 5 de 5 estrelas5/5 (8)
- Trading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaNo EverandTrading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaNota: 5 de 5 estrelas5/5 (1)
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- Administração da Tecnologia de Informação e Comunicação: Da Informática Básica à Gestão do ConhecimentoNo EverandAdministração da Tecnologia de Informação e Comunicação: Da Informática Básica à Gestão do ConhecimentoNota: 5 de 5 estrelas5/5 (1)
- Guia Definitivo Para Dominar o Bitcoin e as CriptomoedasNo EverandGuia Definitivo Para Dominar o Bitcoin e as CriptomoedasNota: 4 de 5 estrelas4/5 (5)
- 37 Regras para um Negócio Online de Sucesso: Como Desistir do Seu Emprego, Mudar Para o Paraíso e Ganhar Dinheiro Enquanto DormeNo Everand37 Regras para um Negócio Online de Sucesso: Como Desistir do Seu Emprego, Mudar Para o Paraíso e Ganhar Dinheiro Enquanto DormeNota: 1.5 de 5 estrelas1.5/5 (2)
- Quero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNo EverandQuero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNota: 5 de 5 estrelas5/5 (26)
- Nr-12 - Segurança No Trabalho Em Máquinas E EquipamentosNo EverandNr-12 - Segurança No Trabalho Em Máquinas E EquipamentosAinda não há avaliações
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNo EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNota: 5 de 5 estrelas5/5 (3)
- Trincas e Fissuras em Edificações: causadas por recalques diferenciaisNo EverandTrincas e Fissuras em Edificações: causadas por recalques diferenciaisAinda não há avaliações
- Consultoria Especializada e Estratégias De Trade De ForexNo EverandConsultoria Especializada e Estratégias De Trade De ForexAinda não há avaliações
- Blockchain Ethereum: Fundamentos de arquitetura, desenvolvimento de contratos e aplicaçõesNo EverandBlockchain Ethereum: Fundamentos de arquitetura, desenvolvimento de contratos e aplicaçõesAinda não há avaliações