Escolar Documentos
Profissional Documentos
Cultura Documentos
Modelagem Matemática E Simulações Computacionais Do Controle Ótimo de Um Quarto Do Sistema de Suspensão Automotiva
Enviado por
Mário LuthTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Modelagem Matemática E Simulações Computacionais Do Controle Ótimo de Um Quarto Do Sistema de Suspensão Automotiva
Enviado por
Mário LuthDireitos autorais:
Formatos disponíveis
1
MODELAGEM MATEMTICA E SIMULAES COMPUTACIONAIS DO CONTROLE
TIMO DE UM QUARTO DO SISTEMA DE SUSPENSO AUTOMOTIVA
Fernando Zago
1
, Marat Rafikov
2
, Antonio Carlos Valdiero
3
, Luiz Antonio Rasia
4
1
UNIJU Universidade Regional do Noroeste do Estado do Rio Grande do Sul, Departamento de Tecnologia Caixa Postal 121,
Av. Rudi Franke 540, CEP 98280-000, Panambi/RS, Brasil, fzago_egm@yahoo.com.br
2
UFABC - Centro de Matemtica, Computao e Cognio, Rua Catequese, 242, 3o andar, Jardim, CEP 09090-400, Santo Andr/SP,
Brasil, marat9119@yahoo.com.br
3
UNIJU Universidade Regional do Noroeste do Estado do Rio Grande do Sul, Departamento de Tecnologia Caixa Postal 121, Av.
Rudi Franke 540, CEP 98280-000, Panambi/RS, Brasil, valdiero@unijui.edu.br
4
UNIJU Universidade Regional do Noroeste do Estado do Rio Grande do Sul, Departamento de Tecnologia Caixa Postal 121, Av.
Rudi Franke 540, CEP 98280-000, Panambi/RS, Brasil, rasia@unijui.edu.br
Resumo: Este trabalho trata do controle timo em um
quarto do sistema de suspenso automotiva. possvel
ajustar o modo de controle da suspenso, que pode
privilegiar o conforto dos ocupantes ou uma conduo mais
esportiva. Apresentam-se os resultados de simulao para
uma bancada de validao experimental a ser construda.
Palavras-chave: Controle timo, suspenso automotiva,
simulao computacional.
1. INTRODUO
Este trabalho apresenta a modelagem matemtica e a
aplicao do controle timo em um quarto do sistema de
suspenso automotiva, destacando ainda o projeto do
prottipo de uma bancada para auxiliar na validao
experimental dos testes com o controlador.
A implantao de sistemas de controle em sistemas de
suspenso automotiva a chave para a preveno e reduo
do excesso de vibrao, a causa de muitos problemas do
corpo humano, tais como dores lombares, citicas e at
mesmo degeneraes na coluna, conforme descrito por
Anflor [1] e regulamentado por [2, 3, 4 e 5]. Com sistemas
de controle tambm possvel ajustar o modo de
conduo do veculo, que amolece a suspenso (para
privilegiar o conforto dos ocupantes) ou a endurece
(privilegiando uma conduo mais esportiva), j enfocando
na rea das suspenses ativas.
No que diz respeito a trabalhos anteriores, Tusset et al.
[6] apresentou a modelagem matemtica e a aplicao de
sistemas de controle em um quarto de suspenso automotiva
com a utilizao de amortecedor magneto-reolgico;
Miaomiao et al. [7] apresentou a aplicao de estratgias de
controle baseado em backstepping de um quarto de
suspenso ativa hidrulica no-linear.
O trabalho est organizado como segue: a seo 2
descreve o projeto de uma bancada para validao
experimental dos testes com o controlador; na seo 3
mostrada a modelagem matemtica de um quarto de
suspenso automotiva, qual ser aplicado o controlador
timo, cuja sntese encontra-se descrita na seo 4. Os
resultados das simulaes so apresentados na seo 5 e, por
fim, as concluses so destacadas na seo 6.
2. DESCRIO DA BANCADA PARA VALIDAO
EXPERIMENTAL
Tendo em vista que a maioria dos resultados obtidos em
trabalhos anteriores advinda de simulao computacional,
existe a necessidade de uma bancada didtica que auxilie
tanto na validao experimental do controlador quanto na
escolha dos parmetros mais adequados para os testes.
Surgiu ento o projeto da bancada a ser descrita abaixo.
A proposta de bancada apresentada trata de um sistema
de guias e bases metlicas para adio de carga, no qual est
montado um sistema massa mola amortecedor em escala
reduzida, equivalente ao modelo real de um quarto de
suspenso automotiva. Essas bases correspondentes ao solo
(1), massa no-suspensa (2) e massa suspensa (3), e esto
apoiadas a quatro molas (4) e um amortecedor (5), contando
ainda com dois blocos/massas (6), que correspondem
massa no-suspensa (conjunto roda-pneu) e massa
suspensa (carroceria) e podem ser facilmente substitudos
por serem apenas apoiados nas bases metlicas. Tem-se uma
oscilao proporcionada por um motor eltrico (7) montado
na base da bancada. prevista a instalao de sensores (8)
que capturem o deslocamento das massas e um sistema de
aquisio de dados que processe esses resultados obtidos e
transforme-os em grficos senoidais que mostrem a variao
de posio pelo tempo. A dinmica de funcionamento
igualmente simples: ao acionar o motor eltrico (o elemento
oscilador), o eixo ao qual est acoplada a came que gira e
movimenta o seguidor, iniciando assim uma oscilao que
vai afetar a base correspondente ao solo, implicando em um
deslocamento linear. Essa vibrao atenuada pelas molas e
o amortecedor de modo que a base da massa no-suspensa e
a da suspensa comeam a vibrar, por influncia das molas
nelas apoiadas.
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications
Serra Negra, SP - ISSN 2178-3667
1172
Modelagem Matemtica e Simulaes Computacionais do Controle timo de um Quarto do Sistema de Suspenso Automotiva
Fernando Zago, Marat Rafikov, Antonio Carlos Valdiero, Luiz Antonio Rasia
2
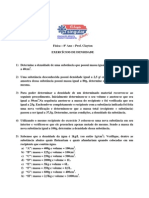
A vibrao da base correspondente massa suspensa
ainda afetada diretamente por um motor de passo tamanho
34 (9), ao qual esta est ligada por um cabo de ao e produz
uma oscilao diferente, porm tambm comandada pelo
computador. O deslocamento de ambas as bases com as
massas capturado pelos sensores e processado pelo sistema
de aquisio de dados, que ser responsvel pela gerao
dos grficos. A Fig. 1 e Fig. 2 mostram, respectivamente,
um croqui da bancada montada e sua maquete eletrnica,
construda em CAD.
Fig. 1. Croqui do projeto de bancada.
Fig. 2. Vista em perspectiva da maquete eletrnica da bancada.
Para efetuar as simulaes computacionais do sistema de
suspenso equivalente, foram estimados os valores
indicados na Tab. 1:
Tabela 1. Valores utilizados nas simulaes.
Especificaes
Valor
Massa suspensa (m
s
) 20 kg
Constante da mola (k
s
) 1800 N/m
Constante de amortecimento (c
s
) 100 N.s/m
Conjunto roda-pneu (m
u
) 2 kg
Constante da mola equivalente ao
pneu (k
u
)
15000 N/m
Altura da protuberncia da pista (Z) 0,1 m
Comprimento da protuberncia da
pista (L)
5 m
Velocidade do veculo (V) 11,11 m/s
3. MODELAGEM MATEMTICA
A metodologia aqui utilizada para a modelagem
matemtica e simulaes computacionais demonstrada por
Tusset et al. [6]. Para aplicar o sistema de controle, deve-se
deduzir o modelo dinmico do sistema estudado. O primeiro
passo escolher o sistema de coordenadas generalizadas;
posteriormente faz-se o Diagrama de Corpo Livre (DCL)
para cada massa e a representao das foras de vnculo; por
fim, aplicado o Princpio de DAlembert. O segundo passo
escrever o modelo matemtico na forma de variveis de
estado. A partir deste modelo matemtico, faz-se a sntese
do controle timo de acordo com a metodologia proposta
por Rafikov et al.[8]. Nas simulaes, o programa utilizado
o MATLAB
TM
/Simulink.
O desenho esquemtico de um quarto de suspenso
automotiva expresso pela Fig. 3:
Fig. 3. Representao simplificada de um quarto de sistema de
suspenso automotiva
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications
Serra Negra, SP - ISSN 2178-3667
1173
3
onde
s
m a massa suspensa,
s
k a constante da mola da
suspenso,
s
c a constante de amortecimento do
amortecedor,
u
m a massa no-suspensa (conjunto roda-
pneu),
u
k a constante da mola equivalente ao pneu,
max
x
o deslocamento mximo do conjunto, Z a altura da
protuberncia da pista, L o comprimento da protuberncia
da pista, V a velocidade do veculo e
0
x a oscilao da
estrada. Na forma de variveis de estado, o modelo
expresso pela Eq. (1):
( ) ( ) ( )
( ) ( )
=
s
f
s
s
s
s
u
f
u
u
u
s
u
s
m
u
m
x x k
m
x x c
x
m
u
m
x x k
m
x x k
m
x x c
x
1 2 1 2
2
0 1 1 2 1 2
1
(1)
Considerando que:
2 4
2 3
1 2
1 1
x y
x y
x y
x y
=
=
=
=
tem-se:
2 4
2 4 3
1 2
1 2 1
x y
x y y
x y
x y y
=
= =
=
= =
(2)
onde
1 1
x y = representa a posio da massa no-suspensa ao
longo do tempo;
1 2 1
x y y = = representa a velocidade da
massa no-suspensa ao longo do tempo;
2 3
x y = representa
a posio da massa suspensa ao longo do
tempo;
2 4 3
x y y = = representa a velocidade da massa
suspensa ao longo do tempo;
1 2
x y = representa a
acelerao da massa no-suspensa ao longo do tempo e
2 4
x y = representa a acelerao da massa suspensa ao
longo do tempo.
Com base nestas equaes, parte-se para a metodologia
do controle timo, proposta por [6] e representada pela Eq.
(3):
( ) BU y g Ay y + + = (3)
Sendo
n
R y o vetor das variveis de estado;
n n
R A
*
a matriz constante formada pela parte linear do
sistema; ) ( y g o vetor cujos elementos so funes
contnuas; B uma matriz constante e U o vetor de
controle. Um quarto de sistema de suspenso expresso
pela Eq. (4):
( )
u
m
m
m
x k
y
y
y
y
m
c
m
k
m
c
m
k
m
c
m
k
m
c
m
k k
y
y
y
y
s
u
u
u
s
s
s
s
s
s
s
s
u
s
u
s
u
s
u
u s
.
1
0
1
0
0
0
0
.
1 0 0 0
0 0 1 0
0
4
3
2
1
4
3
2
1
(
(
(
(
(
+
(
(
(
(
(
+
(
(
(
(
(
(
(
(
(
+
=
(
(
(
(
(4)
4. SNTESE DO CONTROLE TIMO
O vetor de controle U representado pela Eq. (5):
t d
u u U + = (5)
Sendo
d
u a parte feedforward (que mantm o sistema
controlado na trajetria desejada) e
f
u a parte feedback (que
estabiliza o sistema em torno da trajetria desejada).
O controle linear feedforward
d
u mostrado na Eq. (6):
( ) [ ]
B
y g Ay y
u
d d d
d
=
(6)
Para o sistema aqui estudado, a parcela feedforward ser
considerada zero, pelo fato da trajetria desejada ser um
ponto fixo. O controle linear feedback
f
u , por sua vez,
expresso na Eq. (7):
y P B R u
T
f
~ 1
= (7)
onde
d
y y y =
~
e P uma matriz simtrica que satisfaz a
equao de Riccati, dada pela Eq. (8) em conformidade com
[1]:
0
1
= + +
Q P B PBR P A PA
T T
(8)
Nela, as matrizes Q (simtrica) e R so constantes e
positivas. Na seqncia, necessrio calcular as matrizes de
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications
Serra Negra, SP - ISSN 2178-3667
1174
Modelagem Matemtica e Simulaes Computacionais do Controle timo de um Quarto do Sistema de Suspenso Automotiva
Fernando Zago, Marat Rafikov, Antonio Carlos Valdiero, Luiz Antonio Rasia
4
ganho usadas no controlador. Primeiramente so escolhidos
valores adequados para as matrizes Q e R.
5. RESULTADOS DAS SIMULAES
A Fig. 4 mostra o diagrama de blocos construdo e
utilizado nas simulaes. Por meio de ajustes no
controlador, pode-se privilegiar, no prprio modelo
matemtico da suspenso, o conforto dos ocupantes (a roda
oscila, mas a carroceria se mantm com oscilao mnima
ou nula) ou a estabilidade (a roda fica agarrada pista e a
carroceria oscila). Neste trabalho, foram feitas simulaes
com o controlador nas duas situaes, conforme o
demonstrado nas subsees a seguir. Foram utilizados os
seguintes parmetros, semelhantes aos utilizados por
Miaomiao et al. [7]. A oscilao da estrada (
0
x ) mostrada
na Eq. (9):
( )
V L t quando
V L t quando
t
L
V Z
t x
|
|
\
|
|
\
|
=
0
0
2
cos 1 .
2 0
(9)
Os valores das variveis da equao esto descritos na Tab.
1 mostrada anteriormente.
Fig. 4. Diagrama de blocos para o sistema controlado.
5.1. Privilegiando o conforto
De acordo com Zago [9], as suspenses ativas, quando
privilegiando o conforto dos ocupantes do veculo, fazem
com que a oscilao da carroceria seja a menor possvel, no
importando a oscilao da roda. Nestas simulaes, isto foi
feito por meio de uma variao nos ganhos do controlador
timo. Aps um teste com diversas sries de valores, tm-se
os melhores resultados, mostrados pelas Eqs. (10) e (11):
[ ] 1 = R (10)
1 0 0 0
0 10 2,575 0 0
0 0 1 0
0 0 0 10 3,55
9
2
(
(
(
(
(
= Q
(11)
A matriz P calculada atravs da equao de Riccati,
usando a funo LQR do MATLAB
TM
, e seu valor depende
dos valores de Q. O melhor resultado obtido mostrado pela
Eq. (12):
(
(
(
(
=
47 , 41670 10 281952 , 1 47 , 4633 72 , 66141
10 281952 , 1 10 1285 , 8 92 , 120969 45 , 1598785
47 , 4633 92 , 120969 54 , 8298 12 , 4610
71 , 66141 45 , 1598785 12 , 4610 1249380
6
6 7
P
(12)
A Fig. 5 mostra os resultados obtidos atravs das
simulaes.
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications
Serra Negra, SP - ISSN 2178-3667
1175
5
0 0.2 0.4 0.6 0.8 1 1.2
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
Tempo t (s)
P
o
s
i
o
x
(
m
)
x0 = oscilao da estrada
x1 = oscilao da roda
x2 = oscilao da carroceria
Fig. 5. Grfico do seguimento de posio para o sistema controlado
privilegiando o conforto.
A Fig. 6 ainda mostra as velocidades do conjunto ao
longo do tempo.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Tempo t (s)
V
e
l
o
c
i
d
a
d
e
v
(
m
/
s
)
dx1 = velocidade da roda
dx2 = velocidade da carroceria
Fig. 6. Grfico das velocidades do sistema controlado privilegiando o
conforto.
O sinal de controle aplicado ao sistema (uma fora aplicada
para aumentar o contato da roda com o solo) mostrado
pela Fig. 7.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-160
-140
-120
-100
-80
-60
-40
-20
0
20
40
Tempo t (s)
S
i
n
a
l
d
e
c
o
n
t
r
o
l
e
U
(
k
g
f
)
sinal de controle
Fig. 7. Grfico do sinal de controle aplicado ao sistema privilegiando o
conforto.
5.1. Privilegiando a estabilidade
Conforme citado anteriormente, as suspenses ativas,
quando privilegiando a estabilidade do veculo, fazem com
que a roda fique o mximo possvel de tempo em contato
com o solo, permitindo a oscilao da carroceria. Nestas
simulaes, isto foi feito por meio de uma variao nos
ganhos do controlador timo. Aps um teste com diversas
sries de valores, tm-se os melhores resultados, mostrados
pelas Eqs. (13) e (14):
[ ] 1 = R (13)
1 0 0 0
0 10 5,05 0 0
0 0 1 0
0 0 0 10 3,85
7
7
= Q
(14)
A matriz P calculada atravs da equao de Riccati,
usando a funo LQR do MATLAB
TM
, e seu valor depende
dos valores de Q. O melhor resultado obtido mostrado pela
Eq. (15):
=
95 , 13134 57 , 164478 36 , 1396 57 , 78849
57 , 164478 10 08797503 , 4 37 , 21545 53 , 667457
36 , 1396 37 , 21545 37 , 683 52 , 1651
57 , 78849 53 , 667457 52 , 1651 10 78946882 , 1
6
6
P
(15)
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications
Serra Negra, SP - ISSN 2178-3667
1176
Modelagem Matemtica e Simulaes Computacionais do Controle timo de um Quarto do Sistema de Suspenso Automotiva
Fernando Zago, Marat Rafikov, Antonio Carlos Valdiero, Luiz Antonio Rasia
6
A Fig. 8 mostra os resultados obtidos atravs das
simulaes.
0 0.2 0.4 0.6 0.8 1 1.2
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
Tempo t (s)
P
o
s
i
o
x
(
m
)
x0 = oscilao da estrada
x1 = oscilao da roda
x2 = oscilao da carroceria
Fig. 8. Grfico do seguimento de posio para o sistema controlado
privilegiando a estabilidade.
A Fig. 9 ainda mostra as velocidades do conjunto ao
longo do tempo.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Tempo t (s)
V
e
l
o
c
i
d
a
d
e
v
(
m
/
s
)
dx1 = velocidade da roda
dx2 = velocidade da carroceria
Fig. 9. Grfico das velocidades do sistema controlado privilegiando a
estabilidade.
O sinal de controle aplicado ao sistema (uma fora aplicada
para aumentar o contato da roda com o solo) mostrado
pela Fig. 10.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-100
-80
-60
-40
-20
0
20
40
60
80
Tempo t (s)
S
i
n
a
l
d
e
c
o
n
t
r
o
l
e
U
(
k
g
f
)
sinal de controle
Fig. 10. Grfico do sinal de controle aplicado ao sistema privilegiando
a estabilidade.
6. CONCLUSES
Este trabalho apresentou a modelagem matemtica para
o sistema de um quarto de suspenso automotiva e a
aplicao do controle timo para fins de estabilizao das
vibraes, bem como a proposta de uma bancada de
simulao para a validao experimental do modelo. Foi
simulado um obstculo representando a oscilao do relevo
da estrada. Nota-se a importncia da regulagem dos valores
da matriz de ganhos Q. A partir da regulagem adequada dos
ganhos por simulaes computacionais, o controle timo
estabiliza o sistema rapidamente, forando o mesmo a ir at
a posio desejada sem oscilaes de alta freqncia.
A bancada pode ser utilizada na validao experimental
do modelo de um quarto de suspenso e auxiliar na
compreenso de diferentes conceitos passados ao longo de
diferentes componentes curriculares ministrados durante o
curso de Engenharia Mecnica, atendendo as necessidades
das instituies de ensino superior.
AGRADECIMENTOS
Os autores so agradecidos UNIJU, FAPERGS e ao
CNPq pelo apoio financeiro e incentivo na realizao da
pesquisa.
REFERNCIAS
[1]. C. T. M. Anflor, Estudo da Transmissibilidade da
Vibrao no Corpo Humano na Direo Vertical e
Desenvolvimento de um Modelo Biodinmico de
Quatro Graus de Liberdade, Dissertao de Mestrado,
PROMEC, UFRGS, Porto Alegre, 2003.
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications
Serra Negra, SP - ISSN 2178-3667
1177
7
[2]. J. M. Griffin, HandBook Of Human Vibration,
Academic Press, U.S.A, 1990.
[3]. ISO 2631, Guide for the evaluation of human exposure
to whole-body vibration, International Standard, 1974.
[4]. ISO 2631-1, Mechanical Vibration and shock
evaluation of human exposure to whole-body vibration
Part I: general requirements, International Standard,
1997.
[5]. ISO 7962, Mechanical Vibration and shock-
mechanical transmissibility curves of the human body
in the z direction, International Standard, 1987.
[6]. A. M. Tusset, M. Rafikov and J. M. Balthazar, An
Intelligent Controller Design for Magneto-rheological
Damper Based on a Quarter-car Model, Proceedings of
the Journal of Vibration and Control, 15(12), pp. 1907-
1920, 2009.
[7]. M. Miaomiao, C. Hong and C. Yanfeng, Backstepping
Based Constrained Control of Nonlinear Hydraulic
Active Suspensions, Proceedings of the 26
th
Chinese
Control Conference, pp 463-465, Zhangjiajie, July
2007.
[8]. M. Rafikov, J. M Balthazar, Sntese do Controle
timo Linear Feedback para Sistemas que Exibem
Caos, Anais do III Congresso Temtico da Dinmica,
Controle e Aplicaes, pp. 619-633, 2007.
[9]. F. Zago, Controle timo Feedback dos Sistemas
Mecnicos No - Lineares. Relatrio de Iniciao
Cientfica PIBIC/CNPq, Panambi, Agosto de 2008.
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications
Serra Negra, SP - ISSN 2178-3667
1178
Você também pode gostar
- Professor Ebtt FisicaDocumento10 páginasProfessor Ebtt FisicaHillysson SantosAinda não há avaliações
- Apostila Dinâmica, RadeDocumento258 páginasApostila Dinâmica, RadeLuis Fernando Cintra Fratari100% (4)
- Campo Eletrico Uniforme Panosso 10 PDFDocumento2 páginasCampo Eletrico Uniforme Panosso 10 PDFSarah CarolynneAinda não há avaliações
- Producao em Massa - A Maquina Que Mudou o Mundo - WomackDocumento21 páginasProducao em Massa - A Maquina Que Mudou o Mundo - WomackNivea MirandaAinda não há avaliações
- DensidadeDocumento4 páginasDensidadeVivi SalazarAinda não há avaliações
- Força No Movimento CircularDocumento26 páginasForça No Movimento CircularRaquel alyne drumondAinda não há avaliações
- LOGIC - Exercício de CinemáticaDocumento3 páginasLOGIC - Exercício de CinemáticaPedro A L RosaAinda não há avaliações
- Projeto Elétrica - Terreo - Revit - ElizabethDocumento1 páginaProjeto Elétrica - Terreo - Revit - ElizabethJonas BonfimAinda não há avaliações
- Traumatologia ForenseDocumento13 páginasTraumatologia ForenseLucélia BriskiewiczAinda não há avaliações
- Balanca RobervalDocumento16 páginasBalanca RobervalAline MoreiraAinda não há avaliações
- Lista de EletromagnetismoDocumento24 páginasLista de Eletromagnetismocb_penatrujillo33% (3)
- Fisica2 2º Ciclo PDFDocumento114 páginasFisica2 2º Ciclo PDFJoao MassingarelaAinda não há avaliações
- Produção - Mapa de Comparação de PropostasDocumento4 páginasProdução - Mapa de Comparação de PropostasMaura AguiarAinda não há avaliações
- Desvendando o Segredo 2018Documento105 páginasDesvendando o Segredo 2018Nelma Goulart SantosAinda não há avaliações
- IntroduçãoDocumento15 páginasIntroduçãoJúliaGiordaniAinda não há avaliações
- Lei de Hooke - ListaDocumento4 páginasLei de Hooke - ListalouisemarianalemesdacostaAinda não há avaliações
- Cinemática Escalar - ApostilaDocumento52 páginasCinemática Escalar - ApostilaPasquarelli CarolinaAinda não há avaliações
- Ex - Fqa715 - Ee - 2013 5Documento1 páginaEx - Fqa715 - Ee - 2013 5sergiopcm8997Ainda não há avaliações
- Lista de Exercícios 1 - Física 2Documento6 páginasLista de Exercícios 1 - Física 2MarianaAinda não há avaliações
- ESTACAEXCELDocumento13 páginasESTACAEXCELWALTER KOVATCHAinda não há avaliações
- Projeto de Interseção RodoviáriaDocumento40 páginasProjeto de Interseção RodoviáriaWiller B MarinhoAinda não há avaliações
- Apostila UERJ Exames de QualificaçãoDocumento718 páginasApostila UERJ Exames de QualificaçãoJoão Paulo Emrich100% (4)
- A Importância Do Balanço de Massa Na IndústriaDocumento4 páginasA Importância Do Balanço de Massa Na IndústriaGustavo SousaAinda não há avaliações
- Cultivo Do MilhoDocumento56 páginasCultivo Do MilhoDAVIDAinda não há avaliações
- Leis de Newton Exercicios 2012Documento11 páginasLeis de Newton Exercicios 2012Isabelle LopesAinda não há avaliações
- Relações Termodinâmicas para Sistemas SimplesDocumento11 páginasRelações Termodinâmicas para Sistemas SimplesThg747100% (3)
- Vaso S de Gesso para Bonsai TutorialDocumento6 páginasVaso S de Gesso para Bonsai TutorialMartins NetoAinda não há avaliações
- Relatório Experimental IIDocumento9 páginasRelatório Experimental IIFrancilene PereiraAinda não há avaliações
- Eletromagnetismo Vol. 02Documento22 páginasEletromagnetismo Vol. 02peridesAinda não há avaliações
- Aula 1Documento20 páginasAula 1Lohana AbreuAinda não há avaliações