Escolar Documentos
Profissional Documentos
Cultura Documentos
Dinamica Biscaia
Enviado por
SSPINTOTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Dinamica Biscaia
Enviado por
SSPINTODireitos autorais:
Formatos disponíveis
1
DEPARTAMENTODEENGENHARIACIVIL
TEORIADEESTRUTURASII
DINMICADEESTRUTURAS
INTRODUO
GENERALIDADES
No clculo de estruturas supsse, as cargas actuam lentamente, iniciandose
com um valor zero e alcanando o seu valor final num intervalo de tempo
suficientemente largo para que os deslocamentos se gerem, tambm,
lentamente,demodo queasaceleraesevelocidadesdospontosdaestrutura
originemforasdeinrcia,praticamente,desprezveis.
Determinadasacestmumaintervenoclaramentedinmicaenestesentido
cabe citar: foras aplicadas rapidamente, ondas explosivas, foras ou massas
mveis(rodasdosveculossobrepontes),forasperidicas(mquinasrotativas,
turbinas, etc.), movimentos do terreno (sismos) e aces do vento. Todas estas
aces provocam uma resposta dinmica da estrutura, de modo que os seus
diversospontosficamsubmetidosavelocidadeseaceleraesquegeramforas
a ter em conta no equilbrio que, em cada instante, deve existir em todas as
partculas.
2
Aodizerqueumacargaprovocafundamentalmenteumarespostadinmicada
estruturano,porvezes,tarefafcil,jqueumamesmaacovariandocomo
tempopodeser,segundootipodeestrutura,deaplicaolenta,emcujocaso
enfrentamos um problema esttico; ou de aplicao rpida problema, neste
caso, dinmico. Neste sentido existe uma referncia muito importante que o
perodoprprio(oufundamental)daestruturatempoquetardaaestruturaa
realizarumciclodemovimentoperidicolivrejqueasuacomparaocom
ointervalodecargaorienta,emgeral,sobreocomportamentoapreverdesta.A
utilizaodeestruturascadavezmaisesbeltasemaisleves,significaqueseir
obterumadiminuiodosseusperodosprpriosedefinitivamenteumamaior
possibilidade de que os perodos de aplicao das cargas sejam superiores aos
daestrutura,feitoquecaracterizaasacesdinmicas.
Peranteestascargasdinmicasaestruturavibradeforma,emgeral,transitria,
de modo que a vibrao desaparece em pouco tempo, a causa das inevitveis
resistncias passivas. Neste caso interessa conhecer a amplitude da vibrao
deslocamentomximoemrelaoposioderepouso,aodependerdelaas
mximas deformaes e, por conseguinte, as mximas tenses. J que a
amplitudedavibraoporexemplo,odobrodadeformaoesttica,tambm
as tenses dinmicas resultam nesses momentos duplos das tenses estticas.
Sem esquecer que a variao peridica das deformaes e tenses,
frequentemente entre valores e sentidos opostos, d lugar aos fenmenos de
fadiga, nos quais se reduz a tenso de rotura do material, propiciando sua
fragilidade,ouseja,faltadecapacidadeparasuportargrandesdeformaessem
romper.
Em alguns casos a sincronizao entre o perodo prprio da estrutura e o de
aplicaodascargaspodeprovocarumfenmenoderessonncia,demodoque
aquela por muito resistente que seja acabar por ficar fora de servio. Neste
3
sentido o exemplo da ponte de Tacoma um exemplo trivial, j que o seu
colapsoseoriginouempoucashorasaosecoincidirasuafrequnciadetorso
com a dos remoinhos de vento. Este desastre fez evolucionar a tcnica das
pontes que comearam a ter tabuleiros de seco em caixo com importante
resistnciatorsoeperfilaerodinmico.Tambmaschaminsaltasentramem
ressonnciacomventosmoderados(50km/h),denoapresentaromaterialum
forte amortecimento. Por isso conveniente atirantar ou/e colocar
amortecedoresemchamins.
Finalmente,dentrodocampogeraldasestruturasdeedificao,osmovimentos
dosterrenos, sismos,soembastantespasesasacesde maior riscoes um
adequado conhecimento da resposta dinmica pode dar lugar a um estudo
suficientemente exacto do problema. Os conceitos tericos so em apenas em
poucoscasos,abordveisaprocedimentosmanuaisesoastcnicasdeclculo
embasenautilizaodoscomputadores,assimilandoaestruturaaumsistema
discreto, que reduzem o problema a uma resoluo de uma equao
caracterstica de tantas incgnitas como graus de liberdade definidos no
sistema.
DEFINIOEIDEALIZAODESISTEMAS
Aposioqueadoptamosdiferentespontosdaestruturaemfunodotempo
um dos objectivos da dinmica estrutural. O nmero de coordenadas
independentes que se precisam para definir o sistema em funo do tempo
corresponde aos seus graus de liberdade, sendo o seu estudo, em geral, mais
difcilquantomaisgrausdeliberdadesetiver.Qualquerestruturacorresponde
aumsistemacontnuocominfinitosgrausdeliberdade,masasuaidealizao,
ou seleco do modelo matemtico adequado, permite a sua reduo a um
4
sistemadeumdeterminadonmerodegrausdeliberdadeeemalgunscasosa
um sistema de um s grau de liberdade, ou seja, uma s coordenada define a
configurao do sistema. Como exemplo citamse os casos representados nas
figuras1.a)eb)nosquais,habitualmente,seprecisamdosdeslocamentosy(t)e
x(t)dospontosemqueseaplicaaforaF(t).Paraesteestudoocomportamento
deambasasestruturaspodeseidealizaraosdosmodelosdafigura1.c)ondea
massa m representa a massa ou inrcia caracterstica da estrutura, a mola k
equivaleaocoeficientederigidez(ouseja,acargarequeridaparaconseguirum
deslocamento unitrio) no ponto de aplicao da carga; o amortecedor o
correspondente s foras de amortecimento, que so aquelas que extraem
energia da estrutura, de modo que esta alcana estados externos de menor
energia potencial, diminuindo, em consequncia, o seu deslocamento mximo,
eF(t)aforaexteriorou forade excitao.Compreendese facilmentequeo
estudo do modelo matemtico seleccionado proporcionar um conhecimento
tantomaisexactodocomportamentorealquantomaiscertassejamashipteses
adoptadas. Assim, estas simplificaes so suficientes para se entender
claramenteocomportamentodinmicoeconseguirresultadosaceitveis.
Figura1Estruturascujoestudodinmicoseassemelha,simplificativamente,aumsistemade1graude
liberdade.
5
No oscilador da figura 1.c) geramse, mediante um impulso, ou a aplicao
sbitaeseparaodeumacarga,vibraesquesemantmpelaforaelsticada
mola,equetendemadesaparecerporcausadoamortecimento.Aindaquemais
frenteseexponhacombastantedetalhe,convmdizeraquiquenasestruturas
debarrasunidasrigidamente,osgrausdeliberdadeassociamse,emgeral,aos
possveis movimentos dos ns, considerando a estrutura formada por um
sistemademassasdiscretizadas.Assim,porexemplo,numprticoplano,figura
2, o vector deslocamento de cada n composto por 3 componentes
(deslocamento horizontal, deslocamento vertical e rotao), o que reduz o
sistemacontnuoaoutro,nestecaso,de36grausdeliberdade.Cabesimplificar,
aindamais,osgrausdeliberdadeapartirdomodeloeleito,seseprescindirda
deformao axial ou se entender que a rigidez dos elementos horizontais em
relaoaosverticaistalqueseimpedemasrotaesdosnsdaestrutura;no
primeiro caso eliminaramse os deslocamentos verticais dos ns e no segundo,
tambm, as rotaes, o que reduzir o clculo do prtico a sistemas de 24 e 12
grausdeliberdade,respectivamente.
Figura2Reduodoestudodinmicodeumprticoplanoaosdeslocamentosdosseusns.
A semelhana de um sistema a um modelo de apenas 1 grau de liberdade
resulta, deuma forma aceitvel,naquelescasos em queaestruturapossua um
elemento singular onde existe uma grande concentrao de massa e uma
grande indeformabilidade, de modo a que as foras de inrcia possam ser
associadas ao movimento do centro de gravidade do elemento e,
6
simultaneamente, se possam desprezar as foras de inrcia dos elementos
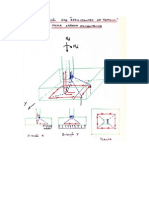
adjacentes. Exemplo caracterstico o dos depsitos ou reservatrios elevado,
figura 3, no qual as foras de inrcia se concentram numa lmina rgida,
actuandoofustecomoelementotransmissordasforaselsticas.
Figura3
Noutroscasos,comoodavigarepresentadanafigura1.a),elegeseomodelode
1 grau de liberdade atravs de uma simplificao importante, concentrouse a
massarepartidanumpontomdio(associadaaelaaforadeinrcia),eoresto
daviga,semmassa,associandolheascaractersticasquegeramaforaelstica
(molacomoseurespectivocoeficientederigidez).Nesteexemplo,osresultados
sero tanto mais aproximados quanto menor seja a massa da viga em
comparaocomaforaquehderesistir.
AMORTECIMENTO
Nos modelos matemticos representados na figura 1, correspondentes a um
oscilador, as foras de excitao F(t) e as elsticas devidas ao deslocamento da
mola tm em geral uns valores concretos e facilmente deduzveis; pelo
contrrio, a determinao das foras de amortecimento um problema muito
7
complexonossistemasmecnicoshabituais,tratandosenaprticadeconseguir
umaaproximaovlida.
umfactoquetodoosistemamecnicoemmovimentolivre,ouseja,queno
actuemsobreelenenhumaforaexterior,continuaemmovimentoduranteum
tempolimitado(ouseja,tendeparaorepouso).Estefenmenodenominadopor
amortecimento,consistenadissipaodaenergiaquepossuiumaestruturaem
movimento, conferida pela actuao das foras de excitao. O amortecimento
podesurgirdediversascausas,citandoseasseguintes:
i. Foras de atrito localizadas em certos pontos ou regies da estrutura
associadasasuperfciesdecontacto;
ii. Resistnciaquepodeoporoar,ouqualquerfluido,aomovimento;
iii. Resistnciafriccionalinternaassociadaestruturamoleculardomaterial
quecompeosistemamecnico;
iv. Transferncia da energia ao meio circundante. Dentro deste caso
encontrase o que alguns autores denominam amortecimento por
radiao que se refere perda de energia global que se produz numa
estruturaatravsdaligao.
Emgeralpararepresentarmatematicamenteoamortecimentoempregaseuma
funodotipo:
( )
n
A
x c t F & = (1)
Sendo:
FA(t), fora de amortecimento; x& , a derivada do deslocamento da massa em
funodotempo;ecumaconstanteemfunodascaractersticasdosistema.
8
Habitualmente elegese uma fora de amortecimento proporcional
velocidade,ouseja:
x c F
A
& = (2)
Denominandose,nestecaso,deamortecimentoviscoso.Aequao(2)vlida
para resistncia ao movimento do ar que rodeia o corpo que se move a pouca
velocidade, ou a resistncia frico da maior parte dos materiais que se
utilizamnasestruturas.
Se a equao (1) se faz n = 0, a fora de amortecimento denominase de
Coulomb,
c F
A
= (3)
e aparece nos casos de frico seca, onde o mximo amortecimento surge nas
fasesiniciaisdumavibraoforada(osciladorsolicitadopelaforaF(t)).
Nas estruturas reais a dissipao de energia devese a algumas das causas
seguintes: comportamento no linear dos materiais estruturais, a solos que
suportam as fundaes, a fenmenos de histeresis, e perca de rigidez da
estruturaporfissurao,etc;assimcomotambm,aoamortecimentoprovocado
pormateriaisnoestruturaiseaosatritosqueelesproduzem.
Por facilitismo do clculo adoptase, geralmente, um amortecimento de tipo
viscoso que no corresponde exactamente realidade, os coeficientes que se
utilizam para definilo determinamse de maneira que a perda de energia
devida ao amortecimento viscoso seja a mesma, aproximadamente, que a
produzida num ciclo de vibrao. Naturalmente, a dificuldade est em
9
determinar adequadamente o valor do coeficiente c, constante de
proporcionalidade, que afectaotermodavelocidade.Paraa definio correcta
do amortecimento nem sequer vlida a execuo de um modelo escala
reduzida, j que resulta na impossibilidade de duplicar adequadamente todos
osdetalhes,recomendandoseaobtenodosvaloresnecessriosparaoclculo
dinmico a partir de estruturas reais, j construdas, anlogas s que esto em
estudo.
EQUAODEEQUILBRIODINMICO
No clculo esttico procedese em cada ponto, ou parte de uma estrutura, a
estabelecer as equaes de equilbrio que actuam sobre o dito elemento
separado do resto, desprezandose, devido lentido do movimento, as foras
de inrcia. No sucede o mesmo quando o dito elemento se move com certa
velocidade e acelerao, j que em cada instante hode estar em equilbrio
todas as foras com incluso das de inrcia, estabelecendose em definitivo a
equaodeequilbriodinmico,deacordocomoprincpioDAlembert:
( ) 0
r r r r r
= + + +
I e A
F F t F F (4)
Na qual:
A
F
r
, a fora de amortecimento; ( ) t F
r
, a fora exterior ou de
excitao, que actua no elemento separado;
e
F
r
, a fora elstica (ou plstica),
emfunodadeformaodorestodaestrutura(paraoosciladordafigura1.c)
a fora gerada pelo deslocamento da mola); e finalmente,
I
F
r
, a fora de
inrcia,proporcionalmassaeaceleraodoelementoseparado.
conveniente ressaltar que esta equao no inclui como foras o peso o peso
prprioou/ecargasestticasdaestrutura,jqueosdeslocamentossemedema
10
partir da deformada que adquire esta aplicao de tais foras, equilibradas
numaprimeirafasepelacorrespondentedeformaodaditaestrutura.
Para o desenvolvimento da equao (4) precisamse definir os parmetros
seguintes:
1) Associadossforasdeamortecimento:
O coeficiente cx de amortecimento viscoso, equao (2), e velocidade linear
dt
dx
, e o coeficiente c de amortecimento viscoso e velocidade angular
dt
d
.
Demodoque:
dt
dx
c F
x A
= ;
dt
d
c M
A
2) Associadosaforasexterioresdeexcitao:
Uma funo do tipo F(x, y, z, t), depende das coordenadas do ponto de
aplicaoedotempo.
3) Associadossforaselsticas(ouplsticas):
i. kx,rigidezedeslocamentolinearx;
ii. k,rigidezedeslocamentoangular.
Demodoque:
x k F
x e
= ;
= k M
e
11
No comportamento do sistema elstico, kx e k so constantes, sendo, neste
caso, a fora proporcional ao deslocamento, comportamento que se
representa pelo diagrama rectilneo da figura 4.a). Se o comportamento
elastoplstico,resultaidealizarpelodiagramabirrectilneodafigura4.b),de
modoquesex<xlexistelinearidade;esex>xlaforapermanececonstante
e igual a Fe,l at x = xrot, momento em que se produz arotura, a no ser que
em um ponto intermdio xi diminua a deformao, cujo caso a fora
adoptadaser: ( ) x x k F
i l e
,
.
Curvas que relacionam foras com deslocamentos como as 1 e 2 da figura
4.c) correspondem tambm a comportamentos reais, contudo, o seu
desenvolvimento matemtico complica enormemente os problemas, de a
que,seadopteparaaestruturaumarespostalinear.
Figura4Representaogrficadasconstantesderigidez,k,dediferentessistemas.
4) Associadossforasdeinrcia:
m,massa;eaceleraolinear
2
2
dt
x d
I,inrcia;eaceleraoangular
2
2
dt
d
12
Demodoque:
2
2
dt
x d
m F
I
= ;
2
2
dt
d
I M
I
DEFINIES
A fim de facilitar a maior compreenso do clculo dinmico que se
desenvolvermaisadiante,procedesedefiniodostermostcnicoscomque
se trabalha mais frequentemente. Assim, segundo as suas causas, os
movimentosclassificamseem:
a) Movimento vibratrio livre: aquele em que a estrutura oscila sem
actuar nenhuma fora exterior, ficando definido pelas condies iniciais
dodeslocamentoevelocidade;
b) Movimento vibratrio forado: aquele em que a estrutura oscila sob o
efeito de uma fora exterior F(t). As caractersticas do movimento
dependemdaditaforaedascondiesiniciais.
Neste caso a fora pode ser independente do movimento (fora
impulsiva)oudependerdele.
c) Movimentoautoexcitado:apresentase quandoumaperturbaoligeira
a partir de uma posio de equilbrio, gera foras que so funo do
movimentodaestrutura.
Esegundoaclasseem:
13
1) Movimento peridico: aquele que se repete em cada intervalo de
tempo,T(perodo);
2) Movimento harmnico: aquele que fica definido por uma funo
sinusoidal.
Associado ao movimento vibratrio livre falase de vibrao modal ou modo
normal que aquele caso particular em que os deslocamentos de todos os
pontos mantm entre si, em qualquer instante, a mesma relao. A frequncia
associadaaummodonormaldenominaseporfrequnciamodal.Utilizandose
otermodeformalmodalparaafunoouvectorquerepresentaasposiesem
qualquerinstante,dospontosdeumsistemaemvibraomodal.
No que diz respeito amplificao de deslocamentos e esforos como
consequncia das cargas dinmicas, para alm da ressonncia (coincidncia de
perodos de carga e estrutura), definese o factor de carga dinmico como a
relao entre a deformao alcanada ao aplicar a carga dinmica e a que se
alcanaria aplicandose o mdulo mximo de tal carga de uma carga esttica.
Estefactorumafunodotempo.
Dentrodoamortecimentodefineseoamortecimentocrticocomoaquelevalor
de coeficiente de amortecimento que caso seja excedido assegura a no
existnciademovimentoperidico.
Finalmente um movimento harmnico (figura 5.a)) fica definido por uma
equaodotipo:
( ) + = wt sen C y (5)
14
emque:
C, a amplitude; , a fase (tempo que a estrutura demora a responder
excitao);w,denominaseporfrequncianaturalouangularerelacionasecom
afrequncianatural,f,ouoperodo,T,medianteasequaes:
T
f
1
= (6)
f w = 2 (7)
Figura5
( ) + = wt sen C y
( ) ( )
C
y
sen sen C y y y s t t
0
0 0 0
0 = = = = = (Figura5.b))
( ) + = wt sen C y
0 = y e 0 = C (inciodaexcitao)
( ) ( ) 1 , 2 , 1 , 0 =
= = = + + = k
w
t k k wt wt sen
K
15
Se s m v / 0
0
= , ou seja, se no instante s t t 0
0
= = a estrutura est em repouso,
ento C y =
0
.
16
17
SISTEMASDE1GDL
MOVIMENTOLIVRENOAMORTECIDO
EQUAODOMOVIMENTO
Osmodelosmatemticosidealizadosnafigura1.c)simplificamseaindamaisse
as foras de excitao, F(t), desaparecem, e as de amortecimento tambm
(F(t) = 0 e c = 0, respectivamente, figura 6). A equao DAlembert reduzse
nestecasoa:
y m ky & & = (8)
emquekrepresentaaconstantederigidezcorrespondentemola;mamassa
dooscilador;e y& & asegundaderivadadodeslocamentoemrelaoaotempo.
Figura6Modelomatemticodeosciladoremmovimentolivrenoamortecido.
18
Asoluodaequaodiferencial(8)dotipo:
( ) ( ) wt B wt A y sin cos + = (9)
em que Ae B (constantes de integrao) se determinam a partir das condies
iniciais (deslocamento y0 e velocidade v0, para t = 0) e
m
k
w = . Substituindo
estesvaloresnaequaoanteriorvem:
( ) ( ) wt
w
v
wt y y sin cos
0
0
+ = (10)
equaoqueseescrevesobaformaseguinte:
( ) + = wt C y sin (5)
sendo:
2
0
2
0
+ =
w
v
y C , a mxima amplitude alcanada no deslocamento;
=
C
y
0
arcsin ,ongulodefase;
m
k
w = ,afrequncianaturalcircular,dedimenses
rad/s.
Omovimentodaequao(5)estrepresentadonasfiguras6.a)eb),eaelecorrespondem:
i. umperodo
k
m
w
T = =
2
2
,emsegundos;
ii. afrequncia
m
k
T
f = =
2
1 1
,emciclosporsegundo.
As denominaes de T, f e w acompanham o apelido de naturais, j que
respondem a caractersticas intrnsecas da estrutura, dependentes apenas dos
seusparmetroselsticos,geomtricosemssicos:kem.
19
Exemplo:
No obstante da sensibilidade da estrutura da figura abaixo, pedese para
determinar a frequncia natural do prtico cuja rigidez flexo tal que
impedeasrotaesnassuasextremidades,eamassadospilarespraticamente
desprezvel.
Resoluo:
Amassa: ton
g
P
m 019 , 1
81 , 9
10 1
=
= =
Arigideziguala: m kN
h
EI
k / 5 , 154
5
10 3831 10 21 12
2
12
2
3
8 6
3
=
= =
Afrequncianaturalvemfinalmente: Hz
m
k
f 96 , 1
019 , 1
5 , 154
2
1
2
1
= = =
MOVIMENTOLIVREAMORTECIDO
EQUAODOMOVIMENTO
Como j exposto anteriormente, a inevitvel existncia de foras de
amortecimento modifica as leis de movimento, fazendo que o oscilador vibre
20
duranteumtempolimitado.Admitindoqueoamortecimentodotipoviscoso,
equao (2), a equao de equilbrio de foras de acordo com o esquema da
figura7,adoptaaseguinteforma:
0 = + + ky y c y m & & & (13)
cujasoluoafunoexponencial:
pt
e C y = (14)
demodoquesubstitudanaequao(13),fica:
pt
e p C y = & ;
pt
e p C y =
2
& &
0
2
= + +
pt pt pt
e C k e p C c e p C m (15)
daqualsededuz:
( ) 0 0
2 2
= + + = + + k p c p m k p c p m e C
pt
(equaodo2grauemp)
m
k
m
c
m
c
p
m
k
m
c
m
c
p
m
k m c c
p
+ =
=
2
2
2
1
2
2 2 2 2 2
4
(16)
Figura7Modelomatemticodoosciladoremmovimentolivreamortecido.
21
Asoluogeraldaequao(13)asomadassoluespossveis,logo:
t p t p
e C e C y
2 1
2 1
+ = (17)
Segundo o sinal da expresso sob a raiz da equao (16): nulo, positivo, ou
negativo,apresentamsetrscasosdiferentes,cujoestudoserealizadeseguida:
1) Amortecimentocrtico:
Nestecasoanulaaexpresso:
0
2
2
=
m
k
m
c
(18)
Logo,fazendoc=ccr,obtmse:
k m k m c k
m
c
cr
cr
= = = 2 4 0
4
2
(19)
Tendo em conta que a frequncia natural circular
m
k
w = , o coeficiente de
amortecimentocrtico,resulta:
w
k
w m c
cr
2
2 = = (20)
Asrazesdaequaocaracterstica(16),so:
m
c
p p
cr
2
2 1
= = (21)
Aequaogeral(13)satisfeitaporqualquerdasseguintesequaesseguintes:
22
( )
t
m
c
cr
e C t y
=
2
1 1
; ( )
t
m
c
cr
e t C t y
=
2
2 2
(22)
De modo que a sua soma corresponder soluo geral deste sistema,
denominadomovimentolivrecriticamenteamortecido:
( ) ( )
t
m
c
cr
e t C C t y
+ =
2
2 1 1
(23)
naqualC1eC2soasconstantesdeintegraodependentesdodeslocamentoe
velocidadesiniciais.Arepresentaogrficadestaequaoindicasenafigura8
ondeamagnitudedasoscilaesdiminuiexponencialmente.
Figura8Representaogrficadomovimentolivrecriticamenteamortecido.
2) Sistemasobreamortecido:
Nestecaso,otermosobaraizdaequao(16)positivo,oqueequivalea:
cr
c c >
as duas razes p1 e p2 resultam positivas, de maneira que a equao do
movimento corresponder equao (17), cuja representao grfica ser
semelhantedafigura8.
3) Sistemasubamortecido:
Neste caso. Ao se ter
cr
c c < , a expresso sob a raiz resulta negativa, de modo
queasrazesdaequao(16)sonmeroscomplexos:
23
m
k
m
c
i
m
c
p
p
+
2
2
1
2 2
(24)
UtilizandoasfunesdeEulerquerelacionamasfunesexponenciaiscomas
trignomtricas:
x i x e
ix
sin cos + = ; x i x e
ix
sin cos =
(25)
obtmseasoluodaequaogeral(13),queadoptaraformaseguinte:
( ) ( ) ( ) ( )
( ) t
m
c
A A
e t w C t w C t y
+ =
2
2 1
sin cos (26)
SendoC1 e C2 constantesde integrao ewAa frequnciade amortecimentodo
sistema,definidapor:
2
2
=
m
c
m
k
w
A
(27)
ou
2
1 = w w
A
(28)
naqual:
m
k
w = ,afrequnciadosistemalivre;e
cr
c
c
= .
Se se substiturem as constantes de integrao C1 e C2 pelos valores
correspondentesscondiesiniciaisy0ev0,obtmse:
( ) ( ) ( )
+
+ =
t w
w
w y v
t w y e t y
A
A
A
t w
sin cos
0 0
0
(29)
24
utilizandose,tambm,comoexpressoalternativa:
( ) ( )
=
t w e C t y
A
t w
cos (30)
sendo,
( )
2
2
0 0
2
0
A
w
w y v
y C
+
+ =
(31)
e,
( )
0
0 0
y w
w y v
tg
A
+
=
(32)
Arepresentaodestemovimentoficailustradanafigura9comalimitaode
v0 = 0. A amplitude da vibrao decresce nos sucessivos ciclos, se bem que as
oscilaes se apresentam em intervalos de tempo anlogos. Intervalo
denominadoperododevibraoamortecidocujovalor:
2
1
2 2
= =
w
w
T
A
A
(33)
Nasestruturasdeedifcios,oscoeficientesrelativosdeamortecimento,segundo
Briggs, variamentre 5a10% do amortecimentocrtico.E segundoNewmark e
Rosemblueth,osvaloresmximosdestescoeficientessofunodosmateriaise
das tenses s que estes esto submetidos, no ultrapassando, nos casos mais
desfavorveis,os20%.Substituindoestevalornaequao(28)deduzse:
w w w w w
A A
= = 9798 , 0 2 , 0 1
2
25
De maneira que, praticamente, pode substituirse a frequncia natural do
movimentolivrepeladomovimentoamortecido.
Figura9Representaogrficadomovimentolivresubamortecido.
DECREMENTOLOGARTMICO
Para estimar experimentalmente o coeficiente de amortecimento de uma
determinadaestruturatrabalhasecomumcoeficientedenominadodecremento
logartmico,,queologaritmodocoeficientedosdeslocamentosdocentrode
gravidade da massa de um oscilador simples linear em vibrao livre, entre
dois mximos sucessivos. Ou seja, se y1 e y2, figura 10,so estes os mximos
sucessivos,ento:
=
2
1
ln
y
y
(35)
Se se substituem os mximos da equao (30) pelos valores correspondentes,
paraanlogot,daequao:
( )
t w
e C t y
=
(36)
cometese o erro praticamente desprezvel, figura 10, j que ambas as curvas
coincidemempontosdetangnciaqueficamdeslocadosligeiramentedireita
26
dosmximos.Demodoqueparadoismximosconsecutivos,y1paraotempot1
ey2parat1+TA:
1
1
t w
e C y
=
( )
A
T t w
e C y
+
=
1
2
logo:
A
T w
y
y
=
=
2
1
ln (37)
edaequao(33):
2
1
2
= (38)
Deacordo,comojexpostoanteriormente,comasimplificao 0
2
= ,fica:
2 (39)
Figura10
27
De modo que resulta possvel estimar o coeficiente de amortecimento, ,
medindo experimentalmente o valor de correspondente a duas amplitudes
mximasconsecutivas,jqueoseuvalorresultaindependentedotempo,t,que
seefectuaamedio.
MOVIMENTOFORADONO
AMORTECIDO
EQUAOGERAL
O estudo do movimento forado no amortecido realizase por diferentes
procedimentos,segundosejaafunoF(t)quedefinealeidecargaaaplicarno
oscilador. A equao diferencial que define a lei do movimento deduzse ao
escreveraequaodeequilbrio,figura11.b):
( ) t F ky y m = + & & (40)
Figura11Modelomatemticodeosciladoremmovimentoforadonoamortecido.
SeF(t)resultaumafunoharmnicaouigualaumaconstante,possvelasua
integrao directa, mas se assim no for, recorrese a outros procedimentos,
comopodeserasubstituiodacargaporumsomatriodeforasharmnicas
combasenassriesFourier,omtodosdosimpulsos,etc.
28
EXCITAOHARMNICA
Afora ( ) ( ) t w F t F sin
0
= ,resultandoaequaodinmicaseguinte:
( ) t w F ky y m sin
0
= + & & (41)
Equao diferencial cuja soluo geral se compe da soma de duas equaes:
yH(t),soluodaequaodiferencialhomognea,ouseja,anulandootermoda
direita;eyP(t),soluoparticularqueresultadaequao(41).Nestecaso:
( ) ( ) ( ) wt B wt A t y
H
sin cos + = (42)
com,
m
k
w = e,
( ) ( ) ( ) t w
r
k F
t w
w m k
F
t y
P
sin
1
sin
2
0
2
=
= (43)
sendo:
w
w
r = ,arelaodefrequnciasdacargaedanaturaldosistema.
Logo:
( ) ( ) ( ) ( ) t w
r
k F
wt B wt A t y
P
sin
1
sin cos
2
0
+ + = (44)
ondeAeBrepresentamasconstantesdeintegraoadefiniremfunodascondies
iniciaisdomovimento.Sey0ev0anulamse;A=0,
( )
2
0
1 r k
F r
B
= .
( ) ( ) [ ] wt r t w
r
k F
y sin sin
1
2
0
= (45)
29
Se a frequncia, w, coincide com a frequncia, w, r = 1, de modo que a
amplitude do movimento resulta infinita. Esta situao limite, muito perigosa
para a estrutura denominase por ressonncia e teoricamente faz com que os
deslocamentos sejam infinitos. Na prtica, quando os deslocamentos so
importantes o sistema deixa de ser linear intervindo o comportamento do
material,oquemodificaashiptesesiniciais.
IMPULSORECTANGULAR
Paraestacarga, figura 12, afunoF(t)correspondeaumimpulsorectangular
finitodevalorP(constante)eduraoentreostempos1e2.Ouseja:
F(t)=0;t<1et>2
F(t)=P;1<t<2 (46)
Figura12Representaogrficadeumimpulsorectangular.
Aoseremascondiesiniciaisy0=v0=0,daequao(10)deduzsequenoh
movimento.Para1<t<2,aequaodinmicaresulta:
P ky y m = + & & (47)
easoluogeral:
30
( ) ( ) [ ] ( ) [ ]
k
P
t w B t w A t y + + =
1 1
sin cos ;1<t<2 (46)
Dascondies:
( ) 0
1
= y ; ( ) 0
1
= y&
obtmse:
( ) ( ) [ ] { }
1
cos 1 = t w
k
P
t y (49)
logo:
( ) ( ) [ ] { }
1 2 2
cos 1 = w
k
P
y ; ( ) ( ) [ ]
1 2 2
sin = w w
k
P
y& (50)
Considerando estes valores como os y0 e v0 da equao (10) (movimento livre
noamortecido),deduzse:
( ) [ ] ( ) [ ] { }
1 2
cos cos = t w t w
k
P
y ;2>t (51)
Denominando,figura12,=(21)esubstituindoonaequao(51):
( ) [ ] ( ) [ ] { } + =
2 2
cos cos t w t w
k
P
y (52)
e fazendo t 2 = t, tempo contado a partir do instante em que desaparece o
impulso:
( ) ( ) [ ] { } + = cos cos t w wt
k
P
y ; =t2t1 (53)
31
oqueindicaqueomovimentocriadoporumimpulsodependedasuadurao,
.
Se a aplicao do impulso durasse um tempo infinitesimal, ou seja, 0 , a
respostaqueproduziriaseria:
( ) ( ) [ ]
1 1
sin d t w w
k
P
t dy = (54)
cujasoluoseobtmdaderivaoemordema1daequao(51).
SOLUESGERAISDAEQUAODINMICA.
INTEGRALDEDUHAMEL
Suponhaseumaleidecarga,F(),semlimitaoalguma,sersemprepossvel
determinaraleidomovimentocomoasomadasleisqueprovocamosinfinitos
impulsos de durao dt em que pode decomporse tal lei. De modo que, de
acordo com a equao (54), o deslocamento no tempo, t, devido actuao da
foraF()ficadefinidopelasomaouintegraodosdeslocamentosdiferenciais
dy(t)(equao(54))desdet=0at,figura13,logo:
( ) ( ) ( ) [ ] ( ) ( ) [ ]
= =
t t
d t w F
w m
d t w F
k
w
t y
0 0
sin
1
sin (55)
A integrao desta equao conhecese como a integrao de Duhamel e
representa o movimento total provocado pela fora de excitao F() actuando
num oscilador linear no amortecido e inclui tanto o movimento transitrio
como o estacionrio. Nem sempre a integrao resulta integrvel, aplicandose
nestescasosprocedimentosnumricosdeintegrao.evidenteaoobservarse
oslimitesdeintegrao,quequalquerquesejaF()asoluoparticularachada
anulase em t = 0, de modo que se o movimento inicial do oscilador fica
32
definido pelos parmetros y0 e v0 h que adicionar ao integral de Duhamel a
soluo dada pela equao (10) correspondente ao movimento livre no
amortecido.
Figura13
( ) ( ) ( ) ( ) ( ) [ ]
+ + =
t
d t w t F
k
w
wt
w
v
wt y t y
0
0
0
sin sin cos (56)
FACTORDECARGADINMICO
SeaexpressoquedefinealeidecargaF()adispormossobaforma ( ) f P
0
,
sendo P0 o valor mximo que pode alcanar a carga, a deformao esttica
correspondenteaplicaodeP0lentamenteseria:
k
P
y
est
0
= (57)
Aointroduziracarga ( ) f P
0
adeformadaser:
( ) ( ) ( ) [ ]
=
t
d t w f
k
w P
t y
0
0
sin (58)
33
denominandose ao coeficiente
( )
est
y
t y
factor de carga dinmico, FCD, que
representa a relao entre a deformao que em cada instante t alcana o
sistemaeaquealcanariaestaticamente.Assim:
( ) ( )
=
t
d t w f
0
sin FCD (59)
DIVERSASRESPOSTASDINMICAS
1. Cargaconstante
Corresponde aplicao brusca no tempo t = 0 de uma carga constante, P, tal
como se representa na figura 14, sendo o deslocamento e velocidade iniciais
nulos.Daequao(56)deduzse:
( ) ( ) [ ] ( ) [ ] wt
k
P
d t w P
k
w
t y
t
cos 1 sin
0
= =
(60)
( ) wt cos 1 FCD = (61)
Arepresentaogrficadofactordecargadinmico,FCD,figura15,indicaque
oseuvalormximo2para
2
T
w
t = =
emltiplos;oqueexpeclaramenteque
tanto as deformaes como os esforos se duplicam para um mesmo sistema
solicitadopelamesmacarga,P,aplicadalentamente.
34
Figura14Cargaconstante. Figura15RepresentaogrficadoFCD.
2. Cargarectangular
Corresponde ao caso j estudado anteriormente de um impulso rectangular
devido a uma carga, P, constante, aplicada instantaneamente, mas com uma
duraolimitada,td,figura16.Integrandoaequao(59)nosintervalos:
d
t 0 ; ( ) wt cos 1 FCD =
d
t t (62.a)
d
t t > ; ( ) [ ] ( ) wt t t w
d
cos cos 1 FCD =
d
t t > (62.b)
Senestasequaessesubstituioperodonaturalemvezdafrequncianatural
=
T
w
2
,adoptamaformaseguinte:
=
T
t
2 cos 1 FCD
d
t t (63.a)
=
T
t
T
t
T
t
d
2 cos 2 cos 1 FCD
d
t t > (63.b)
Paracada
T
t
d
existeumvalortquefazFCDmximo.Seserepresentaremestes
mximosemfunode
T
t
d
obtmseacurvadafigura17,cujaordenadamaior
aproximadamente 2 para
2
T
t
d
> . Outro valor caracterstico 20 , 1 FCD ,
para 2 , 0
T
t
d
.
35
Figura16Cargarectangular. Figura17ValoresmximosdeFCDem
funode
T
t
d .
3. Cargatriangular
Este tipo de lei, figura 18, tpico em exploses de bombas. De acordo com a
equao(59)deduzse:
para0<t<td;
( ) [ ] ( )
( )
+ =
t
w
wt
t
wt d t w
t
w
d
t
d
sin 1
cos 1 sin 1 FCD
0
(64)
Odeslocamentoevelocidadeparat=td,so:
( )
( )
=
d
d
d
d
wt
t w
wt
k
P
y cos
sin
; ( )
( )
+ =
d d
d
d d
t t
wt
wt w
k
P
v
1 cos
sin (65)
Valores que se consideram como y0 e v0 na equao (10), na qual tambm se
substituitporttd,demodoqueomovimentoparat>td,resulta:
( ) ( ) [ ] { } ( ) wt
k
P
t t w wt
t w k
P
y
d
d
cos sin sin
= parat>td (66)
Resultandoofactordecargadinmico:
( ) ( ) [ ] { } ( ) wt t t w wt
t w
d
d
cos sin sin
1
FCD
= parat>td (67)
36
Figura18Cargatriangular. Figura19Valoresmximos
deFCDemfunode
T
t
d .
Se se representarem os valores mximos da equao (67) em funo de
T
t
d
=
T
w
2
obtmse a curva da figura 19 na qual o valor mximo do factor
dinmicoaproximasea2para 0 , 10
T
t
d
.
4. Outroscasos
Nas figuras 20.a), b) e c) recolhemse os valores de FCD, para as foras
indicadas, em funo de
T
t
d
, obtidas de maneira anloga s expostas
anteriormente.
Na figura 20.a) observase que o mximo deslocamento obtmse quando o
intervalo ( )
d
t ; 0 igual ao perodo natural T do sistema. Na figura 20.b)
verificasequeointervalo ( )
d
t ; 0 granderelativamenteaT,oefeitodinmico
praticamente desprezvel. Finalmente na figura 20.c) o mximo apresentase
paraumvalordetdmuitoprximode0,8T.
37
a)Impulsotriangularsimtrico. b)Foraconstantecom
crescimentoiniciallinear.
c)Impulsosinusoidal.
Figura20ValoresdeFCDemfuno
T
t
d paradiferentescargas.
MOVIMENTOFORADOAMORTECIDO
EQUAOGERAL
A equao diferencial que define a lei do movimento deduz ao escrever a
equaodeequilbrio,figura21,
( ) t F ky y c y m = + + & & & (68)
Asoluodestaequaoconstadeumprimeirotermo,deduzidoaoanularseo
2membrodaequao(68),ecujasoluoajobtidaaquandodomovimento
livre amortecido (F(t) = 0); e um segundo termo, ou soluo particular, que
depende da forma de F(t). O primeiro termo corresponde vibrao
38
complementria ou livre, desaparecendo ao longo do tempo, pelo que recebe,
comojexpostoantes,adenominaoderespostatransitria.Osegundotermo
representado pela soluo particular, referese resposta que a nica que
permanecenotempo.
A seguir procedese ao estudo do movimento para diferentes foras de
excitao.
EXCITAOHARMNICA
A fora de excitao : ( ) ( ) t w F t F sin
0
= , resultando a equao dinmica
seguinte:
( ) t w F ky y c y m sin
0
= + + & & & (69)
A soluo complementar, 0 = + + ky y c y m & & & , j se obteve na equao (26) para
c<cr.
( ) ( ) ( ) { } t w C t w C e t y
A A
wt
c
sin cos
2 1
+ =
(70)
Figura21Modelomatemticodeosciladoremmovimentoforadoamortecido.
E a soluo particular, para cuja deduo h que consultar a bibliografia mais
especfica,:
( )
( )
( ) ( )
2
2
2
0
2 1
sin
r r
t w
k
F
t y
P
+
(71)
39
Demodoqueasoluogeralresulta:
( ) ( ) ( ) { }
( )
( ) ( )
2
2
2
0
2 1
2 1
sin
sin cos
r r
t w
k
F
t w C t w C e t y
A A
wt
+
+ + =
(72)
emque:
C1eC2soconstantesdeintegrao,adeduzirapartirdascondiesiniciaisdo
movimento;
( )
( )
2
1
2
tan
r
r
=
,ondeongulodefase,atrasoangular; (73)
r
c
c
= ,ocoeficienterelativodeamortecimento;
w
w
r = ,ocoeficientedefrequncias.
Comojsedisse,amedidaquepassaotempoofactorexponencial
wt
e
tende
a anularse, de modo que o seu termo desaparece, ficando unicamente o outro
termo correspondente resposta estacionria, cujas amplitudes mximas
obtmsepara ( ) 1 sin = t w .Demodoquenarespostaestacionria,ofactorde
amplificao,FA,definidopelocoeficientededeslocamentosdacargadinmica
eaesttica:
( ) ( )
2
2
2
2 1
1
FA
r r +
=
(74)
40
Destaequaodeduzsequeoprimeirotermodaraiztendeafazeraumentaro
deslocamentodinmicorelativamenteaoestticopara 2 < r ,equeosegundo
termo tende a fazlo diminuir. A figura 22 representa a variao de FA em
funo de e r. No caso da ressonncia (r = 1), o factor de amplificao
inversamente proporcional ao coeficiente relativo de amortecimento
=
2
1
FA , amplificandose fortemente em sistemas pouco amortecidos ao
serem os valores de pequenos. Para > 0,707 todos os valores do factor de
amplificaoresultaminferioresunidade.
Na figura 23 traamse para diferentes valores de os diagramas que
representamongulodefasecomr,calculadosapartirdaequao(73).
Figura22VariaodoFAemfunodeer.Figura23Variaodongulodefase,,
emfunodeer.
EXCITAODEBASE
Correspondeaocaso,qui,maisimportantedopontodevistaestrutural,que
o dos sismos e outras excitaes similares devidas a exploses ou actuao
41
dinmica de certos equipamentos. Considerando o sistema da figura 24.a) no
qualabasedeslocaseumaquantidadeyb(t),quefunodotempo,escrevese,
de acordo com o equilbrio de foras (figura 24.b)), a equao dinmica
seguinte:
( ) ( ) 0 = + +
b b
y y k y y c y m & & & & (75)
Figura24Modelomatemticodeosciladoramortecidoexcitadonabase.
Seseintroduziracoordenadarelativa
b
y y u = ,querepresentaoalongamento
da mola;
b
y y u & & & = corresponde velocidade no amortecedor, e a acelerao
absoluta do corpo mvel a
b
y y u & & & & & & = . Por conseguinte, a equao (75), fica
assim:
( ) t y m ku u c u m
b
& & & & & = + + (76)
equivalente portanto equao de um sistema de base fixa submetido a uma
foradeexcitao ( ) t y m
b
& & .Oquepermitesubstituirosistemaexcitadonabase,
por outro equivalente de base fixa e submetido a uma fora aplicada no corpo
mvel, igual inrcia que este teria se se lhe induzisse directamente a
acelerao original da base. Nos sismos os dados da acelerao da terra
obtmsedeumacelermetro,demodoquepossvelescreveraequao(75).
Se se supe, por exemplo, que a excitao da base uma funo sinusoidal de
forma:
42
( ) t w y y
b
sin
0
= (77)
asuasubstituionaequao(75),resulta:
( ) ( ) t w y w c t w y k ky y c y m cos sin
0 0
+ = + + & & & (78)
Fazendo:
( ) ( ) ( ) + = + t w F t w y w c t w y k sin cos sin
0 0 0
(79)
emque:
( ) ( )
2
0
2
2
0 0
2 1 + = + = r k y w c k y F ; ( ) =
= r
k
w c
2 tan (80)
escreveseaequao:
( ) + = + + t w F ky y c y m sin
0
& & & (81)
semelhante equao (69) apenas com a substituio de t w por + t w . A
respostaestacionria(equao(71))nestecaso:
( )
( )
( ) ( )
2
2
2
0
2 1
sin
r r
t w
k
F
t y
P
+
+
(82)
esubstituindoF0peloequivalentedaequao(80),obtmse:
( ) ( )
( ) ( )
( )
+
+
= t w
r r
r
y
t y
P
sin
2 1
2 1
2
2
2
2
0
(83)
Aamplitudedomovimentodescritopelooscilador:
43
( )
( ) ( )
2
2
2
2
0
2 1
2 1
r r
r
y Y
+
+
=
(84)
sendoaamplitudedaexcitaodabasey0.Aocoeficiente
( )
( ) ( )
2
2
2
2
0
2 1
2 1
r r
r
y
Y
T
r
+
+
= =
(85)
denominase transmissibilidade e constitui uma medida de interaco entre a
base e o sistema. Quando a relao: 1
0
>
y
Y
, a combinao da mola e do
amortecedor convertese num amplificador e no caso contrrio, 1
0
<
y
Y
, num
atenuador ou isolador. A figura 25 representa as curvas de transmissibilidade
para diferentes valores de . Observase que as oscilaes no se podem isolar
excepto para valores de r (relaes de frequncias) maiores de 2. Quando
2 > r o movimento transmitido amplificase existindo, ainda, a possibilidade
de que o sistema entre em ressonncia (r =1). A figura 25 indica tambm que
quando 2 > r o movimento isolase melhor sem amortecedores ( = 0) e que
para 2 < r a amplificao da resposta ser maior quanto menor seja o
amortecimento.
Figura25Valoresdatransmissibilidadeemfunodeer.
44
FORATRANSMITIDABASEPORUMA
EXCITAOHARMNICA
Tratase agora de determinar a reaco RB, que se verifica na base de um
sistema excitado harmonicamente, figura 26.a). Ao estabelecer as equaes de
equilbrio,figura26.b),deduzse:
y c ky R
B
& + = (86)
Tendo em conta que a resposta estacionria do movimento, yP, ficava definida
pelaequao(71),adeduode ky e y c& permiteobter:
( ) ( )
( ) ( ) [ ]
+
+
= t w w c t w k
r r
k
F
R
B
cos sin
2 1
2
2
2
0
(87)
oudeformamaiscompacta:
( ) ( )
( )
( ) ( )
( )
+
+
=
= +
+
+
=
t w
r r
w c k
k
F
t w
r r
w c k
k
F
R
B
sin
2 1
sin
2 1
2
2
2
2
2 2
0
2
2
2
2
2 2
0
(88)
sendo:
( ) =
= r
k
w c
2 tan ;
+
= =
2 4 2
3
4 1
2
arctan
r r
r
Figura26Foratransmitidabaseporumaexcitaoharmnica.
45
OvalormximodeRBcorresponderamplitudedaequaoqueodefine:
( ) ( )
( )
( ) ( )
2
2
2
2
0
2
2
2
2
2 2
0
2 1
2 1
2 1
+
+
=
+
+
=
r r
r
F
r r
w c k
k
F
R
B
(89)
eaplicandoomesmoconceitodetransmissibilidade,nestecasoarelaoentrea
amplitude da fora transmitida fundao e a amplitude da fora aplicada,
deduzseamesmaequao(85):
( )
( ) ( )
2
2
2
2
0
max ,
2 1
2 1
r r
r
F
R
T
B
r
+
+
= =
(90)
usadaparaaexcitaonabase.
SOLUOPARAQUALQUERFORADEEXCITAO
Analogamenteaoquejfoiexpostoanteriormente(soluesgeraisdaequao
dinmica, integral de Duhamel), para as vibraes foradas no amortecidas,
resulta possvel a resoluo geral da equao (68) aplicando o mtodo dos
impulsos. Neste caso, se bem que se poderia seguir um raciocnio similar ao
movimento sem amortecimento, estudando a resposta a um impulso de
durao e fazlo tender a zero, procedese aplicao do princpio da
conservao da quantidade de movimento. Igualando o impulso (produto da
fora pelo tempo que actua, Pd) a variao da quantidade de movimento
(massaporincrementodevelocidade,mdv)resulta:
( )
F P
d
dv
m = = (91)
logo:
46
( )
m
d F
dv
= (92)
Este incremento de velocidade hde introduzirse como velocidade inicial na
equao (29) junto com o deslocamento inicial y0 = 0, contando como instante
inicial o tempo . De modo que o efeito que tem esta velocidade sobre o
deslocamento,ser:
( )
( )
( ) [ ]
( )
( )
( ) [ ]
= =
t w
w m
d F
e t w
w
dv
e t dy
A
A
t w
A
A
t w
sin sin (93)
Dado que qualquer excitao arbitrria se pode considerar composta por uma
srie de impulsos sucessivos de pequena durao, figura 13, a resposta do
sistemaigualsomadasrespostasdecadaumdosimpulsosqueacompem,
resultando:
( ) ( )
( )
( ) [ ]
=
t
A
T t w
A
d t w e F
w m
t y
0
sin
1
(94)
Seomovimentoinicialficadefinidopelosparmetrosiniciaisy0ev0temseque
adicionarequao(29)aanterior,demodoqueasoluogeralser:
( ) ( ) ( )
( )
( )
( ) [ ]
+
+
+
+ =
t
A
T t w
A
A
A
A
wt
d t w e F
w m
t w
w
w y v
t w y e t y
0
0 0
0
sin
1
sin cos
(95)
Se se dispe da lei de carga F() da forma ( ) f P
0
, sendo P0 o valor mximo
quepodealcanartalcarga,aleidedeslocamentosparay0=v0=0,ser:
( ) ( )
( )
( ) [ ]
=
t
A
T t w
A
d t w e f
w m
P
t y
0
0
sin
(96)
47
Ao ser o deslocamento esttico, yest, igual a
k
P
0
, o factor de carga dinmico,
ser:
( )
( )
( ) [ ]
=
t
A
T t w
A
d t w e f
w
w
0
2
sin FCD
(97)
48
49
MTODODERAYLEIGH
INTRODUO
OmtododeRayleigh,previstonoactualRegulamentodeSeguranaeAces
para Estruturas e Pontes (artigo 31.2) um mtodo aproximado de
determinao de frequncias. A sua aplicabilidade, embora restrita, estendese
na prtica apenas determinao da frequncia fundamental, ou seja, da
frequnciaprpriamaisbaixa.
Para a aplicao do mtodo tornase necessrio arbitrar qual a configurao
deformada da estrutura durante a vibrao. Quanto melhor a configurao
idealizadacorresponderconfiguraodevibrao,melhorseraaproximao
dafrequnciaobtida,aqualnoentantosempresuperiorfrequnciareal.
O mtodo de Rayleigh fundamentase no princpio da conservao de energia
dum sistema a oscilar em regime livre, desprezando consequentemente a
contribuio das foras de amortecimento. A determinao da frequncia
corresponde assim igualdade entre as energias cintica e potencial mximas
paraaconfiguraodevibraoadoptada.
ainda corrente diferenciar a aplicao do mtodo de acordo com a maior ou
menor distribuio das caractersticas de inrcia e flexibilidade do sistema
50
distinguindosenestembitoasformulaesdomtodoparasistemascontnuos
esistemasdiscretos.
SISTEMASCONTNUOS
Considerase nesta seco a aplicao do mtodo de Rayleigh a sistemas cujas
caractersticas de inrcia ou/e flexibilidade se encontram distribudas no
domniodosistema.
Para exemplificar a aplicao do mtodo considerase uma viga simplesmente
apoiada de vo L, massa distribuda m(x) e rigidez de flexo EI(x). Arbitrando
umaconfiguraodeformadaquedependeharmonicamentedotempo:
( ) ( ) wt x A t x y sin ) ( , = (98)
onde A e ) (x representam respectivamente, a amplitude de vibrao
(eliminadanosclculossubsequentes)eumafunodeformaquerelacionaos
deslocamentos das diversas seces. Esta configurao deformada tem apenas
que verificar as condies de apoio especficas do problema bem como a
continuidade nos troos em que o sistema real apresente continuidade de
deslocamentos.
Aenergiapotencialnumdadoinstante:
( )
( )
( )
=
=
L
,,
L
dx x x EI wt A dx
x
t x y
x EI t V
0
2 2 2
0
2
2
2
) ( ) ( sin
2
1 ,
) (
2
1
(99)
ondeosobrendicedesignaaderivadaemordemcoordenadadeposiox.
51
Emparticularovalor mximodaenergiapotencialatingesequandoaparcela
harmnicaunitria,ouseja:
=
L
,,
dx x x EI A V
0
2 2
max
) ( ) (
2
1
(100)
Nasmesmascircunstnciasaenergiacintica,numdadoinstante:
( )
( )
( )
=
=
L L
dx x x m wt w A dx
t
t x y
x m t C
0
2 2 2 2
0
2
) ( ) ( cos
2
1 ,
) (
2
1
(101)
cujovalormximo:
=
L
dx x x m w A C
0
2 2 2
max
) ( ) (
2
1
(102)
Durante a vibrao, as duas energias, V e C, variam continuamente, e
transformamseumanaoutra,masasuasomaconstante.Noinstanteemque
Vmximo,Cnula(porqueasvelocidadesanulamse),equandoCmximo,
V nula (j que anulase a deformao). Portanto, deve ser Max V = Max C.
Assim,igualandoasexpresses100e102obtmseaseguinteequao:
( )
( )
=
L
L
dx x x m
dx x x EI
w
0
2
0
, ,
2
2
) (
) (
(103)
A equao 103 traduz a frequncia prpria circular que o sistema apresentava
se vibrasse com a configurao adoptada. Na realidade a configurao
fundamental , dentro das infinitas configuraes deformadas em
conformidade com as condies impostas inicialmente, aquela cuja frequncia,
52
designadaaquidefrequnciafundamentalcircular,amenor.Umcritriopara
arbitrar a configurao fundamental consiste em verificar, para alm das
condies cinemticas, as condies estticas (em termos do andamento dos
esforos) verificados no sistema real. De facto, distribuies de esforos
incompatveis com o sistema real traduzema existncia de restries artificiais
que tm por efeito rigidificar o sistema ou, o que o mesmo, aumentar a
frequnciafundamental.
Considerese a aplicao da equao 103 ao sistema indicado com a massa
distribuda e rigidez de flexo ambas uniformes, isto m(x) e EI(x) constantes.
Admitindo como configurao de vibrao uma funo polinomial do 2 grau,
ou seja, do tipo c bx ax x + + =
2
) ( e impondo a verificao das condies de
apoio 0 ) ( ) 0 ( = = L chegaseaosvaloresdasconstantesa,bec,quevalem:
2
1
L
a =
L
b
1
= 0 = c
Substituindoagoranaequao103obtmseoseguintevalorparaafrequncia
fundamentalcircularcorrespondenteaestaconfiguraodevibrao:
4
2
120
L m
EI
w
Repetindo este procedimento para uma configurao sinusoidal do tipo
=
L
x
x
sin ) ( afrequnciacircularcorrespondentepassaaser:
4
4
2
L m
EI
w
53
Notesequeafrequnciadeterminadainicialmentecercade23.19%superior
correspondente configurao sinusoidal. De facto, a configurao parablica
pressupeumdiagramademomentosconstante(relembrese,deResistnciade
Materiais, que o diagrama de momentos proporcional curvatura da
deformada) violando, entre outras a condio de anulamento dos momentos
nos apoios. Em contrapartida a configurao sinusoidal, alis a verdadeira
configurao fundamental, verifica a condio de anulamento dos momentos
sobre os apoios apresentando adicionalmente o momento mximo a meio vo.
Serveesteexemploparaacentuarqueamelhoraproximaofrequnciaou/e
configuraofundamentalaquelaque,dentrodasconfiguraesqueverificam
ascondiescinemticas,melhoraproximaascondiesestticas.
Naexistnciaderigidezesconcentradasaexpresso(100)generalizasepara:
+ =
i
i i
L
x K A dx x x EI A V ) (
2
1
) ( ) (
2
1
, ,
2 2
0
, ,
2 2
max
(104)
ondeKiexireferenciamaisimarigidezconcentradaearespectivaposio.Da
mesmaforma temseque na ocorrncia de massas concentradas a equao 102
paraaenergiacinticamximaalterasepara:
+ =
j
j j
L
x F w A dx x x m w A C ) (
2
1
) ( ) (
2
1
2 2 2
0
2 2 2
max
(105)
onde Fj e xj so respectivamente, o peso e a coordenada de posio da jsima
massaconcentrada.
Nosentidodecontornaradificuldadenoarbtriodaconfiguraofundamental
desenvolveuse um outro procedimento designado de mtodo de Rayleigh
54
simplificado que consiste em admitir que a configurao de vibrao
corresponde deformada do sistema quando se aplica o carregamento
gravtico.Defacto,naexistnciadeforasviscosasaconfiguraofundamental
correspondedeformadadosistemaquandoseaplicaocarregamentoinercial,
ouseja:
) ( ) ( ) (
max
x y x m x Q
f f
& & = (106)
em que o subndice f refere a configurao fundamental. Como partida se
desconheceaconfiguraofundamentalimpossveldeterminarcorrectamente
Qf(x).Senoentanto,admitirsequeaaceleraomximaemcadasecoigual
aceleraodagravidade,isto:
) ( ) ( ) ( x F g x m x Q
g
= = (107)
acorrespondentedeformada,aolongodotempo
( ) ( ) wt x A wt x y t x y
g g g
sin ) ( sin ) ( ) , ( = = (108)
onde yg(x) e Ag representam respectivamente, a deformada devida aplicao
docarregamentogravticoeaamplitudedarespectivafunodeforma.Nestas
circunstnciasaenergiapotencialmximapodeserentendidacomootrabalho
dasforasgravticasnadeformadagravticacujovalormximo:
= =
L
g g
L
g
dx x x m A g dx x y x F V
0 0
max
) ( ) (
2
1
) ( ) (
2
1
(109)
peloquearespectivafrequnciafundamentalresulta:
55
=
L
g
L
g
L
L
g
g dx x y x m
dx x y x m
g
dx x m
dx x x m
A
g
w
0
2
0
0
2
0 2
) ( ) (
) ( ) (
) (
) ( ) (
(110)
Atentese que a configurao deformada adoptada, a deformada do sistema
quando aplicado o carregamento gravtico, verifica no s as condies
cinemticas, pois uma deformada real, como tambm as condies estticas
dosistema,poisequilibraumdeterminadocarregamento.Deixaseaocuidado
doleitorconfirmarqueaaplicaodestemtodoaoexemploatrsconsiderado
conduzseguintefrequnciaprpriacircular:
4
2
548 . 97
L m
EI
w
valorque0.14%superioraoreal.
Refirase finalmente que embora o carregamento em causa seja um
carregamento gravtico este pode ser aplicado em qualquer sentido (inclusive
no sentido vertical ascendente) e em qualquer direco (inclusive na direco
horizontal)consoanteaconfiguraodeformadaquesepretendeimpor.
SISTEMASDISCRETOS
Considerese que por aplicao do procedimento de concentrao de massa o
sistema da seco anterior se reduzia ao sistema de trs graus de liberdade
ilustradonafigura27.
Admitindo como configurao de vibrao a deformada correspondente
aplicao esttica dos pesos correspondentes a energia potencial mxima da
56
deformao armazenada na viga resulta equivalente ao trabalho exterior, ou
seja:
=
i
gi i
y F V
2
1
max
(111)
emqueFiumaforadeintensidadeigualaopesodamassaatribudoaograu
de liberdade i e ygi o respectivo deslocamento na configurao de vibrao
adoptada.
Figura27
Ao calcular a frequncia do modo de vibrao inferior, podese tomar a curva
de deformao esttica, representada na figura 27, como uma configurao
extrema do sistema durante a vibrao. Nesta hiptese, supondo um
movimentoharmnicosimples,osdeslocamentosdascargasF1,F2eF3durante
avibraosero:
( ) wt y cos
1
; ( ) wt y cos
2
; ( ) wt y cos
3
(112)
Da mesma forma a energia cintica do sistema alcana um valor mximo em
que a viga durante a vibrao passa pela sua posio intermdia (linha
horizontal).Paraosdeslocamentosdasexpresses112osvaloresnumricosdas
velocidades das cargas correspondentes a esta posio so wy1, wy2 e wy3 e a
energiadosistemaresultar:
=
i
gi i
y m C
2
max
2
1
& (113)
57
o que, supondo, como j se referiu, movimento harmnico e amortecimento
nuloresulta:
=
i
gi i
y F w
g
C
2 2
max
2
1
(114)
Igualando,semelhanadoquefoifeitoanteriormente,asenergiaspotenciale
cinticamximasdeterminaseafrequnciacirculardevibrao
=
i
gi i
i
gi i
y F
y F
g w
2
2
(115)
E,consequentemente,operodoprpriodevibrao,:
= =
i
gi i
i
gi i
y F
y F
w
T
2
2
2
(116)
Comosepodeconstatar,paraoclculodeweTapenasnecessrioconheceras
deformaesestticasdaviga:y1,y2ey3.Quantidadesfacilmentedeterminveis
pelos mtodos habituais. Para incluir a influncia do peso da viga suficiente,
como foi referido inicialmente nesta seco, fraccionala em vrios troos cujos
pesosestaroaplicadosnosseusrespectivoscentrosdegravidade.
EXEMPLOS
1. Considerese a viga biapoiada da figura 27. Admitir que os ns esto
equidistantes,queumquartodamassaestruturalficaconcentradanosns1
e 3 e a restante no n 2. Determinar a frequncia prpria da viga pelo
mtododeRayleighsendoasuarigidezdeflexoEIeovoL.
58
Resoluo:
Resolvendo a partir do mtodo da flexibilidade leccionado na disciplina de
TeoriadeEstruturasI,amatrizdeflexibilidade:
[ ] ( )
kN
m
EI
L
F
3
01172 . 0 01432 . 0 009114 . 0
01432 . 0 02083 . 0 01432 . 0
009114 . 0 01432 . 0 01172 . 0
Adistribuiodemassaepesos:
4
3 1
L m
m m
= =
2
2
L m
m
=
AforasPicujaintensidadeigualaopesodasmassasmisoiguaisa:
) (
4
2
4
kN
L mg
L mg
L mg
P
i
Osdeslocamentosygivm:
[ ] { }
EI
L mg
y
y
y
EI
L mg
P F y
g
g
g
i g
4
3
2
1
4
01237 . 0
01758 . 0
01237 . 0
6144
76
3072
54
6144
76
= =
Substituindonaequao115obtmseafrequnciafundamentalcircular:
59
Nonumeradordaequao115:
{ } { }
( )
EI
L
mg
EI
L mg L mg
EI
L mg L mg
EI
L mg L mg
y F y F
i
T
i
i
i i
5
2
4 4 4
1536
23
6144
76
4 3072
54
2 6144
76
4
=
=
=
= =
Enodenominadordamesmaequao:
{ } { }
( )
( )
2
9
3
2
4
2
4
2
4
2 2
2359296
545
6144
76
4 3072
54
2 6144
76
4
EI
L
mg
EI
L mg L mg
EI
L mg L mg
EI
L mg L mg
y F y F
i
T
i
i
i i
=
=
=
= =
Resultando:
( )
s
rad
mL
EI
mL
EI
w
4 4
822 . 64
545
35328
= =
ou:
( ) Hz
mL
EI
mL
EI
f
4 4
642 . 1
545
35328
2
1
= =
O valor assim obtido apenas 0.04% superior ao que se obteria para o modo
fundamentaldevibraoresolvendoaequaocaractersticacorrespondenteao
modelodiscretizado.
60
A referir ainda o facto da frequncia determinada pelo mtodo de Rayleigh
para o modelo com massas concentradas ser inferior correspondente
distribuio uniforme de massa. Isto resulta exclusivamente de que ao
concentrarmos as massas em determinados pontos estamos indirectamente a
considerar outro sistema que no o original. Embora as frequncias no sejam
equiparveis de realar que o procedimento de concentrao de massas
conduzgeralmenteasistemascommenorfrequnciafundamental.
2. Determinarafrequnciadevibraoaplicandoestemtodoparaaestrutura
indicadanafigura28.
Dados:
Massasdospisos1,2e3iguaisa:
m1=200ton,m2=300tonem3=400ton
Rigidez dos elementos estruturais entre
pisosiguaisa:
k1 = 120000 kN/m, k2 = 240000 kN/m e
k3=360000kN/m.
Figura28
Resoluo:
Fazendo ij o deslocamento relativo do piso i em relao ao piso j, os
deslocamentoscorrespondentesaplicaodeforasestticasequivalentesaos
pesosdecadapisosodadospor:
61
=
+ =
+ + =
03 3
32 03 2
21 32 03 1
y
y
y
Calculandoosvaloresde,obtmse:
= =
=
+
=
=
+ +
=
g
K
F
g
K
F F
g
K
F F F
120000
200
240000
500
360000
900
1
1
21
2
2 1
32
3
3 2 1
03
Peloque,osdeslocamentosaonveldospisosso:
=
=
=
g y
g y
g y
7200
18
7200
33
7200
45
3
2
1
Substituindonaequao115conduza:
( ) ( ) ( )
g
g g g g g g
g g g g g g
w
+ +
+ +
=
2
2 2 2
2
7200
18 400 33 300 45 200
7200
18 400 33 300 45 200
e que corresponde a uma frequncia fundamental circular de w = 14.771 rad/s
ou seja f = 2.351 Hz ou a um perodo de T = 0.425 segundos. Para efeitos de
comparao, de salientar que o valor exacto da 1 frequncia prpria desta
estrutura de w = 14.5 rad/s. O erro cometido apenas de 1.87% e, como
esperado,porexcesso.
62
Paracalcularaproximadamenteaprimeirafrequnciadeedifcios(quecomose
sabe a mais importante) da vibrao natural das estruturas porticadas, pode
portanto recorrerse a programas de clculo de anlise esttica de prticos
planos. Para uma dada direco aplicamse simultaneamente, ao conjunto de
prticoscomdesenvolvimentonadirecoconsideradaeaonveldecadapiso,
as foras estticas horizontais equivalentes s cargas verticais permanentes do
pisorespectivo,ecalculamseosdeslocamentosaonveldecadapiso.Umavez
calculados os diversos deslocamentos de cada piso, a aplicao das equaes
115 e 116 do o valor da frequncia em radianos por segundo e do perodo
prpriodevibraoemsegundos,respectivamente.
Nos sistemas articulados interessa, principalmente, a vibrao vertical. Para
determinar a primeira frequncia circular modal, w, concentramse nos ns a
metade dos pesos das barras que ocorrem a eles, adicionandose ainda, as
possveiscargasexterioresqueactuemtambmnessesns.Nesteprocedimento
desprezase a energia cintica correspondente s componentes horizontais, xi,
do deslocamento dos ns. Erro, em geral, de pouca importncia, j que as
componentes xi so muito menores que as componentes yi. fcil corrigir este
erro j que, no clculo matricial obtmse junto com os deslocamentos yi os
deslocamentosxi.Demodoquenestecasovir:
( )
=
i
gi gi i
i
gi i
y x F
y F
g w
2 2
2
(20)
Desalientar,talcomoofazoR.S.A.,quenaaplicaodestemtodohqueter
emcontanosarigidezemassadoselementosestruturaisconsideradoscomo
resistentes, mas tambm as dos elementos considerados no resistentes que a
eles esto ligados, tal como paredes de alvenaria e similares, os quais podem
63
conferirumaumentoderigidezaoedifcio,dandoassimorigemavaloresmais
elevadosdafrequnciaprpriafundamental.Comoparavaloresmaiselevados
defrequnciacorrespondemtambmvaloresmaiselevadosparaoscoeficientes
ssmicos, a no considerao da rigidez e da massa destes elementos no
estruturais, pode conduzir a situaes no conservativas e, portanto, contra a
segurana.
Para finalizar, salientese ainda que a determinao de frequncias prprias
superiores primeira atravs do mtodo de Rayleigh, envolve a utilizao de
uma deformada correspondente a uma configurao de vibrao diferente da
adoptada.Paraissotornarseianecessrioconhecerascaractersticasdinmicas
doedifciooquesetornariacomplexo,amenosquefosserealizadaumaanlise
dinmicaexacta.
O mtodo de Rayleigh tornase no entanto suficiente quando se pretende
apenas proceder a uma anlise esttica equivalente. As condies de
aplicabilidade dessa anlise esttica a edifcios, designados vulgarmente por
edifcioscorrentes,sodefinidasnoartigo30.4doR.S.A.daseguinteforma:
i. Noapresentarem,emplanta,distribuiesdesproporcionadasentrea
massaearigidez;
ii. No apresentarem no seu desenvolvimento em altura, grandes
variaesdemassaouderigidez;
iii. Terem uma estrutura em malha ortogonal e no demasiado
deformvel;
iv. Terem pisos constitudos de forma que possam considerarse como
diafragmasindeformveisnoseuplano.
64
Pretendese com a primeira condio que os efeitos da toro, no
contabilizados na anlise plana simplificada, sejam pouco significativos.
Entendese a condio como satisfeita quando o centro de massa dos
pisos,considerandoacombinaoquasepermanentedeaces,nodista
do centro de rigidez mais de 15% da dimenso do edifcio segundo a
direcoperpendiculardasforasconsideradas.
A clusula relativa a variaes em altura de massa e rigidez pretende
excluir da anlise esttica equivalente os edifcios com acentuadas
variaesdascaractersticasdinmicasemaltura.Aelevadaconcentrao
de esforos e deformaes nos pisos de transio, completamente
aprecivelapenasatravsdumaanlisedinmica,justificaestacondio.
A obrigatoriedade dos edifcios correntes apresentarem estrutura em
malha ortogonal explicase por este tipo de estrutura exibir um
comportamento dinmico mais simples em geral e em particular por
apresentarem efeitos de toro controlados. Quanto ao ponto relativo
excessiva deformabilidade da estrutura esta destinase a acautelar as
seguintesocorrncias:
i. Contribuio significativa dos efeitos geometricamente no
lineares. Entendese que uma anlise de primeira ordem
suficiente quando os correspondentes deslocamentos horizontais
relativos entre dois pisos no excedem 1.5% da distncia entre os
pisos;
ii. Contribuio significativa dos modos superiores. Esta situao
verificase quando a frequncia fundamental to baixa que o 2
modo(defrequnciasuperiordeduasatrsvezes)sesituanazona
65
de maior contedo de frequncias da aco ssmica. Considerase
que a estrutura no excessivamente deformvel sempre que a
frequncia fundamental seja superior quer a 0.5 Hz quer ao
quocientede8pelonmerodepisos.
Por fim, a condio relativa indeformabilidade dos pisos no seu plano
destinase a garantir que as foras de inrcia desenvolvidas durante a
actuao do sismo sejam absorvidas pelos prticos que lhe resistam
proporcionalmenteinrciadoselementosverticaisqueconstituemesses
prticos.Assimgarantesequedevidoacossmica,todososelementos
verticaissoigualmenteesforados.
Damesmaformaparapontesdevesatisfazerseasseguintescondiesde
aplicabilidade:
i. Teremasuperstruturasuportadaporpilaresverticais;
ii. Terem o eixo longitudinal em planta praticamente recto e o vis, caso
exista,poucoacentuado;
iii. Terem vos no excessivamente desiguais e apresentarem estrutura
sensivelmente simtrica em relao a um plano perpendicular ao seu
eixolongitudinal.
Ficamassim,excludaspartidatodasaspontessuspensas,aspontesem
arco e as pontes com pilares inclinados do tipo escora. Se a ponte for
muito extensa, podero existir diferenas significativas entre as vibraes
ssmicas na base dos diferentes suportes, pelo que se dever considerar
aquando da determinao dos efeitos das aces ssmicas sobre a
estrutura.
Você também pode gostar
- Tratamentos EsseniosDocumento130 páginasTratamentos EsseniosElesiane Schneider100% (29)
- EscuteoSeuCorpo LiseBourbeauDocumento187 páginasEscuteoSeuCorpo LiseBourbeauNeuza Filipa Domingos Cristina67% (3)
- Curso de SalgadinhoDocumento77 páginasCurso de SalgadinhoCLAUDIA LUCIA ALVES DE ARAUJO100% (4)
- Modelo de Manual Da QualidadeDocumento15 páginasModelo de Manual Da QualidadeSSPINTOAinda não há avaliações
- 17 Paredes - CORDocumento76 páginas17 Paredes - CORJosé FonsecaAinda não há avaliações
- Calculo de LajeDocumento16 páginasCalculo de LajePatricia Lumi RodriguesAinda não há avaliações
- NBR 6457 - Amostras de Solo - Preparacao para Ensaios de Compactacao e Ensaios de CaracterizacaoDocumento12 páginasNBR 6457 - Amostras de Solo - Preparacao para Ensaios de Compactacao e Ensaios de CaracterizacaoJoaog123100% (2)
- Ficha Fisico Quimica 9 Ano Forcas e MovimentosDocumento5 páginasFicha Fisico Quimica 9 Ano Forcas e MovimentosAna QuartinAinda não há avaliações
- Dinâmica FerroviáriaDocumento47 páginasDinâmica Ferroviáriarenato100% (8)
- Cofragens IstDocumento32 páginasCofragens IstSSPINTOAinda não há avaliações
- Estruturas de ContençãoDocumento29 páginasEstruturas de ContençãoSSPINTOAinda não há avaliações
- 2009000378Documento101 páginas2009000378Julio SantosAinda não há avaliações
- Cap. I - DemoliçõesDocumento0 páginaCap. I - DemoliçõesKlarc CamachoAinda não há avaliações
- Sistema de Forma para Estrutura de Concreto - Texto Paulo Assahi (Material Complementar)Documento23 páginasSistema de Forma para Estrutura de Concreto - Texto Paulo Assahi (Material Complementar)Job JustinoAinda não há avaliações
- Cimbres FixosDocumento37 páginasCimbres FixosSSPINTOAinda não há avaliações
- FORMADocumento21 páginasFORMAvaldemircolaresAinda não há avaliações
- Alaco Colaborante PDFDocumento20 páginasAlaco Colaborante PDFamaral86Ainda não há avaliações
- AcetatosProfAppleton FundacoesDocumento6 páginasAcetatosProfAppleton FundacoesSSPINTOAinda não há avaliações
- Um Breve Resumo Dos PlanetasDocumento4 páginasUm Breve Resumo Dos PlanetasSSPINTOAinda não há avaliações
- Fundacoes Directas - Sapatas ExcentricasDocumento23 páginasFundacoes Directas - Sapatas ExcentricasRicardo Jorge Barbosa SantosAinda não há avaliações
- Capitulo 10 - Fundações SuperficiaisDocumento47 páginasCapitulo 10 - Fundações SuperficiaisSSPINTOAinda não há avaliações
- Pre-Dimensionamento UFP SebentaDocumento59 páginasPre-Dimensionamento UFP SebentaJoão Filipe Drumond100% (2)
- PS 7.4 - AquisicaoDocumento12 páginasPS 7.4 - AquisicaoSSPINTOAinda não há avaliações
- Não Conformidades em Construtoras RedaçãoDocumento13 páginasNão Conformidades em Construtoras RedaçãoNubiana OliveiraAinda não há avaliações
- Manual PCMAT SESIDocumento108 páginasManual PCMAT SESIwww.cadilhac.com.brAinda não há avaliações
- Exercicio Flexao SimplesDocumento4 páginasExercicio Flexao SimplesSSPINTOAinda não há avaliações
- Exercicio TirantesDocumento4 páginasExercicio TirantesSSPINTOAinda não há avaliações
- Exercicio Viga Pre-EsfDocumento6 páginasExercicio Viga Pre-EsfSSPINTOAinda não há avaliações
- MEE EscavacoesEstruturasContencao Geral PDFDocumento124 páginasMEE EscavacoesEstruturasContencao Geral PDFMiguel Teixeira CouteiroAinda não há avaliações
- 10 DeformacaocorDocumento35 páginas10 DeformacaocorSSPINTOAinda não há avaliações
- Fendilhacao e Rotura DuctilDocumento3 páginasFendilhacao e Rotura DuctilSSPINTOAinda não há avaliações
- 03 T Materiais Escoras&Tirantes FlexaoSimples EBI 2011 2012Documento169 páginas03 T Materiais Escoras&Tirantes FlexaoSimples EBI 2011 2012SSPINTOAinda não há avaliações
- Regras de Pré Dimensionamento de CA - USPDocumento27 páginasRegras de Pré Dimensionamento de CA - USPheldioAinda não há avaliações
- Cap. XVII - Paredes de BetãoDocumento9 páginasCap. XVII - Paredes de BetãoSSPINTOAinda não há avaliações
- Hiperplasia Vaginal - Relato de CasoDocumento6 páginasHiperplasia Vaginal - Relato de CasofootpeidoAinda não há avaliações
- Balanço de Energia em Tubo de VenturiDocumento5 páginasBalanço de Energia em Tubo de VenturiDudu FeliipeAinda não há avaliações
- Pilhas Pequenas, Médias e GrandesDocumento2 páginasPilhas Pequenas, Médias e GrandesjoanirseAinda não há avaliações
- Teste de Fisica 3 UnidadeDocumento4 páginasTeste de Fisica 3 UnidadeRaineldes CruzAinda não há avaliações
- 2 PS Matemática Perímetros P 49Documento219 páginas2 PS Matemática Perímetros P 49Douglas OliveiraAinda não há avaliações
- Amostragem - CETEMDocumento36 páginasAmostragem - CETEMMarcelo LiraAinda não há avaliações
- Blocos PDFDocumento2 páginasBlocos PDFBira VieiraAinda não há avaliações
- Determinação GravimétricaDocumento5 páginasDeterminação Gravimétricaandresa0% (1)
- Caracterização Do Caroço de Açaí Como Insumo para Geração de Eletricidade Via GaseificaçãoDocumento7 páginasCaracterização Do Caroço de Açaí Como Insumo para Geração de Eletricidade Via GaseificaçãoAbel GhellerAinda não há avaliações
- 0400221549046153998-6VPRV2 Fis C05 PDFDocumento10 páginas0400221549046153998-6VPRV2 Fis C05 PDFAry JuniorAinda não há avaliações
- Lista 1 Stoodi - Física - Leis de NewtonDocumento7 páginasLista 1 Stoodi - Física - Leis de Newtoneng civil Paulo Vitor MedeirosAinda não há avaliações
- Relatório 6 Física Experimental Sidney RobertoDocumento7 páginasRelatório 6 Física Experimental Sidney RobertoSidney RobertoAinda não há avaliações
- Unicamp SimuladoDocumento5 páginasUnicamp SimuladoRodrigo RodriguesAinda não há avaliações
- Lab. Física - 2 Lei de NwetonDocumento8 páginasLab. Física - 2 Lei de NwetonGeorgia CunhaAinda não há avaliações
- Campo Elétrico Exercícios GeraisDocumento37 páginasCampo Elétrico Exercícios GeraisPaulo FrancoAinda não há avaliações
- F137 - RESUMO - EletromagnetismoDocumento10 páginasF137 - RESUMO - EletromagnetismoFabio MeisterAinda não há avaliações
- Experimento 7Documento11 páginasExperimento 7vinicius kardecAinda não há avaliações
- Materia PrimaDocumento10 páginasMateria PrimaKio AdexAinda não há avaliações
- Lista 02 VibDocumento2 páginasLista 02 VibGuilherme Grisotto PintoAinda não há avaliações
- Física e Química - 11º Ano Ficha Da Semana Nº1Documento5 páginasFísica e Química - 11º Ano Ficha Da Semana Nº1Luuh 93Ainda não há avaliações
- Cad. 03 - Dinâmica - Algumas Aplicações Das Leis de Newton - Frente - ADocumento24 páginasCad. 03 - Dinâmica - Algumas Aplicações Das Leis de Newton - Frente - AGabriel Ambrosio Dos SantosAinda não há avaliações
- Manual - Balança Analítica AG 200Documento36 páginasManual - Balança Analítica AG 200EvertonAinda não há avaliações
- Wag TRANSF TEACHING FUNDAMENTOS FISICA3 2PP OUT2010 WCORRADIDocumento193 páginasWag TRANSF TEACHING FUNDAMENTOS FISICA3 2PP OUT2010 WCORRADIThiago MilogranoAinda não há avaliações
- Lista de Exercícios - 3 CefetDocumento3 páginasLista de Exercícios - 3 CefetBreno Vinheiros MirandaAinda não há avaliações
- Energia Exemplos PDFDocumento1 páginaEnergia Exemplos PDFraqueltorquatoAinda não há avaliações
- Ficha II FGDocumento4 páginasFicha II FGAbdussalām Al-MuzāmbiqīAinda não há avaliações