Você também pode gostar
- Apostila de Eletrônica DigitalDocumento14 páginasApostila de Eletrônica DigitalWesley PatrickAinda não há avaliações
- Apostila de LuminotécnicaDocumento18 páginasApostila de LuminotécnicaWesley PatrickAinda não há avaliações
- Apostila - Controle e AutomaçãoDocumento19 páginasApostila - Controle e AutomaçãoWesley PatrickAinda não há avaliações
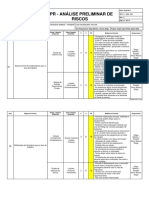
- Sistema APR Web Manual Do UsuarioDocumento40 páginasSistema APR Web Manual Do UsuarioWesley PatrickAinda não há avaliações
- Exercícios Estabilidade TransitóriaDocumento3 páginasExercícios Estabilidade TransitóriaWesley PatrickAinda não há avaliações
- Definição Dos Níveis de Reserva Girante em Sistemas Hidrotérmicos Com Elevada Penetração de Energia EólicaDocumento20 páginasDefinição Dos Níveis de Reserva Girante em Sistemas Hidrotérmicos Com Elevada Penetração de Energia EólicaWesley PatrickAinda não há avaliações
- Sobredimensionamento de Motores Elétricos Trifásicos Na IndústriaDocumento28 páginasSobredimensionamento de Motores Elétricos Trifásicos Na IndústriaWesley PatrickAinda não há avaliações
- Atividade 1Documento1 páginaAtividade 1Wesley PatrickAinda não há avaliações
- 1º Teste 8ºDocumento4 páginas1º Teste 8ºPaula Cristina Neves MirandaAinda não há avaliações
- Bravox b400dDocumento2 páginasBravox b400dGilson Da Silva Menezes0% (1)
- Espectrometria de Absorcao Molecular - ExerciciosDocumento6 páginasEspectrometria de Absorcao Molecular - ExerciciosDébora AlvimAinda não há avaliações
- Elementos de Máquinas II - 2017 - Engrenagem Dente RetoDocumento38 páginasElementos de Máquinas II - 2017 - Engrenagem Dente RetoNubia BergaminiAinda não há avaliações
- Propriedades ColigativasDocumento22 páginasPropriedades Coligativasskull41Ainda não há avaliações
- Catalogo Geral Menor SchneiderDocumento136 páginasCatalogo Geral Menor SchneiderCarlos Magno PeterleAinda não há avaliações
- Matemática Resolução FichasDocumento93 páginasMatemática Resolução Fichasmaria100% (1)
- Eletroquímica - Exercícios: 01. (PUC) Na Pilha Eletro-Química Sempre OcorreDocumento8 páginasEletroquímica - Exercícios: 01. (PUC) Na Pilha Eletro-Química Sempre OcorreLukas de FreitasAinda não há avaliações
- Ionomero de VidroDocumento15 páginasIonomero de VidroandersonAinda não há avaliações
- TermodinâmicaDocumento4 páginasTermodinâmicaGiovanniAinda não há avaliações
- Apr - 59 Pré Montagem e Montagem de Estruturas Metalicas e TransportesDocumento20 páginasApr - 59 Pré Montagem e Montagem de Estruturas Metalicas e Transporteseverton83% (6)
- Evolução Dos Modelos AtômicosDocumento6 páginasEvolução Dos Modelos Atômicosjulia BeatrizAinda não há avaliações
- Resumo OBA 1Documento24 páginasResumo OBA 1alissonferrerAinda não há avaliações
- MH - Tabela Periódica Resumida Set2014Documento3 páginasMH - Tabela Periódica Resumida Set2014Aíla LimaAinda não há avaliações
- Manual VSD 1000 28x Camera Speed Dome de 28xDocumento56 páginasManual VSD 1000 28x Camera Speed Dome de 28xRaynerson MouraAinda não há avaliações
- Cálculo Del Freno de DiscoDocumento8 páginasCálculo Del Freno de Discoalejandro_baro419Ainda não há avaliações
- 1 AnoDocumento16 páginas1 AnoRonan SilvaAinda não há avaliações
- Ficha Sobre Luz - 8ºanoDocumento5 páginasFicha Sobre Luz - 8ºanoRádio BroasAinda não há avaliações
- Flex Volume 03 - Importados PDFDocumento338 páginasFlex Volume 03 - Importados PDFrobinsoneletricistaAinda não há avaliações
- Trabalho de ReaçõesDocumento11 páginasTrabalho de ReaçõesRafael ErdmannAinda não há avaliações
- Capítulo. 2.Documento58 páginasCapítulo. 2.Rodolfo de OliveiraAinda não há avaliações
- Relatorio Curva V MotoresDocumento5 páginasRelatorio Curva V MotoresGian VargasAinda não há avaliações
- Eletromecanica Metrologia DimensionalDocumento152 páginasEletromecanica Metrologia DimensionalJoão Marcelo T HAinda não há avaliações
- Transmissões Manuais - How Stuff WorksDocumento6 páginasTransmissões Manuais - How Stuff WorksBruno OliveiraAinda não há avaliações
- Equações Diofantinas Com Duas e Três Variáveis .Documento23 páginasEquações Diofantinas Com Duas e Três Variáveis .Rusevel PaivaAinda não há avaliações
- Aula Pratica Carga ElectricaDocumento6 páginasAula Pratica Carga ElectricaEltonAinda não há avaliações
- RLC Senoidal PDFDocumento4 páginasRLC Senoidal PDFMario RichardAinda não há avaliações
- Campo ElétricoDocumento4 páginasCampo ElétricoMariana AlbuquerqueAinda não há avaliações
- Manual - Rdi Ihm Mapa - Modbus PDFDocumento30 páginasManual - Rdi Ihm Mapa - Modbus PDFLaercio MarquesAinda não há avaliações
- Exercicios Dimensionamento CircuitosDocumento4 páginasExercicios Dimensionamento CircuitosRafael Sanitá0% (1)