Você também pode gostar
- 057 076b Baia de GuanabaraDocumento22 páginas057 076b Baia de GuanabaraJaclyn MitchellAinda não há avaliações
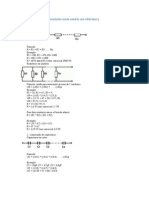
- Formulas Mais Usadas em EletrônicaDocumento8 páginasFormulas Mais Usadas em EletrônicaSal MineirimAinda não há avaliações
- Apostila - Bombas Hidráulicas II - SENAIDocumento23 páginasApostila - Bombas Hidráulicas II - SENAIalexoliveira21100% (1)
- In 02Documento45 páginasIn 02estenioAinda não há avaliações
- Manual UltrassomDocumento175 páginasManual UltrassomWillian RauberAinda não há avaliações
- Maer 2015Documento49 páginasMaer 2015Gabriel Grácio VelosoAinda não há avaliações
- AE-SVC 03.03 - Interligação de Cabo de Co Municação PDFDocumento4 páginasAE-SVC 03.03 - Interligação de Cabo de Co Municação PDFGeraldo Silva de LunaAinda não há avaliações
- Caixa de FerramentasDocumento3 páginasCaixa de FerramentasJúlio César de SousaAinda não há avaliações
- Aps Contabilidade de CustosDocumento39 páginasAps Contabilidade de CustosTommy PiresAinda não há avaliações
- Uma Base de Dados de Radiação Solar Na America Do Sul, Estimada Por SatéliteDocumento6 páginasUma Base de Dados de Radiação Solar Na America Do Sul, Estimada Por SatéliteToninho PorpinoAinda não há avaliações
- Cabos Condutoresisoladores e Estruturas de LT S PDFDocumento11 páginasCabos Condutoresisoladores e Estruturas de LT S PDFYasmim de SouzaAinda não há avaliações
- Efeitos Dos Elementos de Liga Nos AçosDocumento31 páginasEfeitos Dos Elementos de Liga Nos AçosJosimar MachadoAinda não há avaliações
- Preleção - Tentações Do Mundo e As Vitórias MoraisDocumento3 páginasPreleção - Tentações Do Mundo e As Vitórias MoraisJoão Brasil LimaAinda não há avaliações
- NBR IEC 60694 - Especificações Comuns para Normas de Equipamentos de Manobra de Alta-Tensão e Mecanismos de ComandoDocumento115 páginasNBR IEC 60694 - Especificações Comuns para Normas de Equipamentos de Manobra de Alta-Tensão e Mecanismos de Comandoluizviveros100% (1)
- Contrato Locação WALDOMIRODocumento11 páginasContrato Locação WALDOMIROleticia valenteAinda não há avaliações
- Apostila - 1º Ano PDFDocumento56 páginasApostila - 1º Ano PDFEdinei ChagasAinda não há avaliações
- Regulamento 21 Fenearte 2021Documento20 páginasRegulamento 21 Fenearte 2021FILIPE HENRIQUE PetroniAinda não há avaliações
- NR 20 - Explosão Na The Dutch State MinesDocumento19 páginasNR 20 - Explosão Na The Dutch State MinesCPSSTAinda não há avaliações
- Durabilidade Do ConcretoDocumento24 páginasDurabilidade Do ConcretofelipecguedesAinda não há avaliações
- A Teoria Da Tectonica de PlacasDocumento9 páginasA Teoria Da Tectonica de PlacasBarbara MoutinhoAinda não há avaliações
- REV - GAC - Manual GovernorDocumento15 páginasREV - GAC - Manual Governorthyagoenerg100% (4)
- Apostila de Instrumentacao - PetrobrasDocumento2 páginasApostila de Instrumentacao - PetrobrasJabulani2010Ainda não há avaliações
- Aspro ManualDocumento38 páginasAspro ManualBrener MartinsAinda não há avaliações
- I4320004 CelescDocumento32 páginasI4320004 Celescthiago fritscheAinda não há avaliações
- Segurança em Trabalhos Com MaquinariaDocumento93 páginasSegurança em Trabalhos Com MaquinariaRodrigo Mendes FerreiraAinda não há avaliações
- Solis 1 2 e 3Documento12 páginasSolis 1 2 e 3Carlos Marinho SilvaAinda não há avaliações
- Uranio No Brasil Geologia Jazidas e OcorDocumento300 páginasUranio No Brasil Geologia Jazidas e OcorFabiolaDuarteLira100% (1)
- Split e SplitlessDocumento2 páginasSplit e SplitlessLis Gonçalves100% (2)
- CARTILHA - Inspecao de Gas Final - 20!9!22 FINALDocumento28 páginasCARTILHA - Inspecao de Gas Final - 20!9!22 FINALMayara MarquesAinda não há avaliações
- Fundamentos de Transporte de Calor e Massa - Aula 1Documento35 páginasFundamentos de Transporte de Calor e Massa - Aula 1Glauber HenriqueAinda não há avaliações