Você também pode gostar
- Controlador Lógico Programável - Questões Adaptadas/íntegra de ConcursosDocumento8 páginasControlador Lógico Programável - Questões Adaptadas/íntegra de ConcursosbetoAinda não há avaliações
- Cat 140KDocumento20 páginasCat 140Kjoao maria100% (1)
- Retificadores Monofásicos ExperimentaisDocumento73 páginasRetificadores Monofásicos ExperimentaisGustavo Sousa100% (1)
- Om LHB655NW PDFDocumento49 páginasOm LHB655NW PDFLuiz MelgesAinda não há avaliações
- Aula CAD2 DDocumento16 páginasAula CAD2 DIgor Ribeiro VieiraAinda não há avaliações
- 4 Max MinDocumento7 páginas4 Max MinIgor Ribeiro VieiraAinda não há avaliações
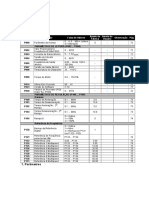
- Parâmetros de configuração do inversorDocumento9 páginasParâmetros de configuração do inversorIgor Ribeiro Vieira0% (1)
- Trabalho ItcDocumento5 páginasTrabalho ItcIgor Ribeiro VieiraAinda não há avaliações
- Teoria de Antenas CelularesDocumento9 páginasTeoria de Antenas CelularesMychael Jales100% (1)
- C37 94 Técnica e TestesDocumento6 páginasC37 94 Técnica e TesteszersifrAinda não há avaliações
- T1 1 Merged 1Documento244 páginasT1 1 Merged 1Daniel FélixAinda não há avaliações
- Apostila de treinamento e dicas de reparo em TVs LCDDocumento40 páginasApostila de treinamento e dicas de reparo em TVs LCDMohamed Salah0% (1)
- Caderno de Estudo PDFDocumento178 páginasCaderno de Estudo PDFGlauber RufinoAinda não há avaliações
- Evolução e desempenho dos computadores ao longo das geraçõesDocumento50 páginasEvolução e desempenho dos computadores ao longo das geraçõesKaroline TorresAinda não há avaliações
- MKT 006319 02 Flyer A4 Série 900 PDF DigitalDocumento2 páginasMKT 006319 02 Flyer A4 Série 900 PDF DigitalAdilson Leite ProençaAinda não há avaliações
- Medidas e Instrumentação-Aula Prática OsciloscópioDocumento21 páginasMedidas e Instrumentação-Aula Prática OsciloscópioLuiz Carlos KarpinskiAinda não há avaliações
- NE #02 - Mar.77Documento148 páginasNE #02 - Mar.77Marcio BadinAinda não há avaliações
- Instruções de operação UPS redundante DWTMDocumento20 páginasInstruções de operação UPS redundante DWTMJhuno Silva PaulaAinda não há avaliações
- E-Book Estratégia de Funcionamento Da Ecu Edc7 BoschDocumento24 páginasE-Book Estratégia de Funcionamento Da Ecu Edc7 BoschRicardo Tavares100% (6)
- Manual Ponte de Kelvin+microohmimetroDocumento11 páginasManual Ponte de Kelvin+microohmimetrocarlosmarciosfreitas100% (1)
- Constituintes e componentes eletrônicosDocumento40 páginasConstituintes e componentes eletrônicosAndré TojalAinda não há avaliações
- Manual do Proprietário ShacmanDocumento236 páginasManual do Proprietário ShacmanWagner Ferreira100% (4)
- LIVRO - Diodo e Transistores Bipolares - Rev03Documento152 páginasLIVRO - Diodo e Transistores Bipolares - Rev03lucinaldoAinda não há avaliações
- 2.01 - Manual Rádio Cobra 148 GTLDocumento13 páginas2.01 - Manual Rádio Cobra 148 GTLANSELMO LIMAAinda não há avaliações
- Philips 50PUG690078 - 4KDocumento83 páginasPhilips 50PUG690078 - 4KcynobaAinda não há avaliações
- Redes de computadores: componentes, topologias e modos de transmissãoDocumento3 páginasRedes de computadores: componentes, topologias e modos de transmissãoJOSENETO AGUIAR DE AMORIMAinda não há avaliações
- Datasheet GWN7664LR PortugueseDocumento2 páginasDatasheet GWN7664LR PortugueseEliézio dos Santos ScherrAinda não há avaliações
- Frequencímetro de Alta Resolução DVM13MFC2Documento6 páginasFrequencímetro de Alta Resolução DVM13MFC2Antonio C D FerreiraAinda não há avaliações
- Redes ComputadoresDocumento24 páginasRedes ComputadoresDon Ramón0% (1)
- Avaliação 1 - Diodos - Prazo Prorrogado - 16 - 10 - Valor - 5 Pontos - Revisão Da TentativaDocumento4 páginasAvaliação 1 - Diodos - Prazo Prorrogado - 16 - 10 - Valor - 5 Pontos - Revisão Da TentativaLuanaAinda não há avaliações
- M064 - Manual do receptor mono canal ImmunityDocumento2 páginasM064 - Manual do receptor mono canal ImmunityMarceloAinda não há avaliações