Você também pode gostar
- 02 A-Aula 18.1 Estudo Do PontoDocumento33 páginas02 A-Aula 18.1 Estudo Do PontoLaiana TrindadeAinda não há avaliações
- 5199Documento106 páginas5199Cidda SouzaAinda não há avaliações
- Exercícios:: MatemáticaDocumento22 páginasExercícios:: MatemáticaEdmilla MarquezAinda não há avaliações
- Aula 1Documento7 páginasAula 1Esdin Horácio LuísAinda não há avaliações
- Aula 09 - Negacao de QuantificadoresDocumento3 páginasAula 09 - Negacao de QuantificadoresLindemberg Alves100% (1)
- Exercícios para o IFPI 2022.1Documento5 páginasExercícios para o IFPI 2022.1FNalbert SilvaAinda não há avaliações
- Ce1 - Exercícios de Revisão Area 2Documento12 páginasCe1 - Exercícios de Revisão Area 2Mariana AnçaAinda não há avaliações
- Razões EquivalentesDocumento5 páginasRazões Equivalentesdhyana666Ainda não há avaliações
- A Matemática Ensinada Na Escola e Aprendida No CotidianoDocumento4 páginasA Matemática Ensinada Na Escola e Aprendida No CotidianoDavid Capistrano NetoAinda não há avaliações
- Material Dos VídeosDocumento45 páginasMaterial Dos VídeosGabriel Santos CostaAinda não há avaliações
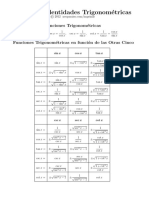
- Tabla de Identidades TrigonometricasDocumento4 páginasTabla de Identidades TrigonometricasLiis RiincónAinda não há avaliações
- Lista Exercicios Superficies 2017Documento4 páginasLista Exercicios Superficies 2017Gabriel Tweedie MüllerAinda não há avaliações
- Função 1º Grau Exercícios Resolvidos PDFDocumento19 páginasFunção 1º Grau Exercícios Resolvidos PDFJosé Valmir Taborda86% (7)
- Matematica 7 Ano PlanejamentoDocumento6 páginasMatematica 7 Ano PlanejamentoEdvaldo SantosAinda não há avaliações
- Aula 12 - DeterminantesDocumento22 páginasAula 12 - DeterminantesHimsky MassaokaAinda não há avaliações
- PolinomiosDocumento6 páginasPolinomiosEmanuel SantosAinda não há avaliações
- Tensores 2020Documento46 páginasTensores 2020Jhonnes ToledoAinda não há avaliações
- Cilindro Cone+Esfera2 o ExperimentoDocumento11 páginasCilindro Cone+Esfera2 o ExperimentoCleberson RamonAinda não há avaliações
- Calcule o Valor de X para Os Triângulos AbaixoDocumento2 páginasCalcule o Valor de X para Os Triângulos AbaixoLilian PedroAinda não há avaliações
- Eletromagnetismo - Parte IiDocumento10 páginasEletromagnetismo - Parte IiAntonio Tavares Franca JuniorAinda não há avaliações
- Básicas A) : Aula 1 - Operações Multiplicação DivisãoDocumento12 páginasBásicas A) : Aula 1 - Operações Multiplicação DivisãoVitor BotelhoAinda não há avaliações
- TRABALHO CONTROLE DE SISTEMAS SimulinkDocumento9 páginasTRABALHO CONTROLE DE SISTEMAS SimulinkRayara Chioato FerreiraAinda não há avaliações
- Matematica Oscar 2012Documento32 páginasMatematica Oscar 2012Franze_araujo_scribdAinda não há avaliações
- Exercicio Resolvidos InformaticaDocumento39 páginasExercicio Resolvidos InformaticaVíctor André MacandzaAinda não há avaliações
- Atividade1 (InstMatematica)Documento1 páginaAtividade1 (InstMatematica)Jadson EvertonAinda não há avaliações
- AP3 - MD - 2019.1-GabaritoDocumento8 páginasAP3 - MD - 2019.1-GabaritoTony MendesAinda não há avaliações
- CN - 2-Notas de Aulas-Sistemas LinearesDocumento22 páginasCN - 2-Notas de Aulas-Sistemas LinearesJoão GabrielAinda não há avaliações
- 8a - Aula CMSP - Problemas de ContagemDocumento12 páginas8a - Aula CMSP - Problemas de ContagemRosana RodriguesAinda não há avaliações
- PlanoDeAula 5Documento3 páginasPlanoDeAula 5Info FreimamAinda não há avaliações