Você também pode gostar
- L&s Duet 1 - London & Shay (Papa Livros)Documento527 páginasL&s Duet 1 - London & Shay (Papa Livros)Maíra tonelli0% (1)
- Planejamento Anual Todas As Disciplinas 6º Ao 9º PDFDocumento9 páginasPlanejamento Anual Todas As Disciplinas 6º Ao 9º PDFKarine OlímpioAinda não há avaliações
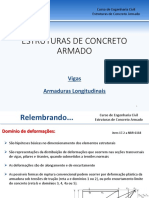
- Unidade 2 - Vigas - Armadura LongitudinalDocumento41 páginasUnidade 2 - Vigas - Armadura LongitudinalJulia Giraldi FerrariAinda não há avaliações
- NBR 5426 - Planos de AmostragemDocumento63 páginasNBR 5426 - Planos de Amostragemjorge uiliam pereira da encarnação100% (5)
- Psiquiatria Clinica - Lawewnce C. Kolb - Cap. Sobre NEUROSEDocumento45 páginasPsiquiatria Clinica - Lawewnce C. Kolb - Cap. Sobre NEUROSEMárcio SzymczakAinda não há avaliações
- Aula 5 - TQM IntroduçãoDocumento21 páginasAula 5 - TQM IntroduçãoSérgio Augusto SobrinhoAinda não há avaliações
- UntitledDocumento2 páginasUntitledT. CastelloAinda não há avaliações
- Proposta 2 Modelo de Plano de Aula para Avaliação 2019-1Documento4 páginasProposta 2 Modelo de Plano de Aula para Avaliação 2019-1Izabel BorgesAinda não há avaliações
- A Pré-História AmericanaDocumento4 páginasA Pré-História AmericanaDaniel Torres Pereira SaraivaAinda não há avaliações
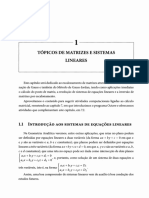
- 1 Topicos de Matrizes e Sistemas Lineares Baldin FuruyaDocumento33 páginas1 Topicos de Matrizes e Sistemas Lineares Baldin FuruyaESCAPE THE BILAinda não há avaliações
- INTRODUÇÃO À FENOMENOLOGIA - PROF Maria Cecilia Isatto Parise.Documento42 páginasINTRODUÇÃO À FENOMENOLOGIA - PROF Maria Cecilia Isatto Parise.leonardo100% (1)
- Termo de Garantia Avell 2022Documento6 páginasTermo de Garantia Avell 2022Nathan FerreiraAinda não há avaliações
- Questões Semana 6Documento4 páginasQuestões Semana 6Eduardo MullerAinda não há avaliações
- Manual Mach3 Tradução Thunder CNCDocumento130 páginasManual Mach3 Tradução Thunder CNCAntonio Rosemblach100% (1)
- Universidade Estácio de SáDocumento10 páginasUniversidade Estácio de SáAdrielly WanzelerAinda não há avaliações
- FICHA - DE - INSCRIÇÃO - Infraero - CBA - 2 02.2022Documento2 páginasFICHA - DE - INSCRIÇÃO - Infraero - CBA - 2 02.2022Marcelo 2195Ainda não há avaliações
- Enade 2022 - ResultadosDocumento1 páginaEnade 2022 - Resultadosgrabrirel007Ainda não há avaliações
- Plenitude - Divaldo FrancoDocumento105 páginasPlenitude - Divaldo FrancoCarlosAinda não há avaliações
- DescartesDocumento8 páginasDescartesVitor Moroni BarrozoAinda não há avaliações
- Panorama 164 Kubitza Agua Parte3Documento15 páginasPanorama 164 Kubitza Agua Parte3Larissa AssisAinda não há avaliações
- DMT - Guia de Extracao em PTBR (XFDMT v1.5)Documento8 páginasDMT - Guia de Extracao em PTBR (XFDMT v1.5)FraterIgorUmbraObicitur100% (2)
- Máscara - Trabalho Final Com As 3 Etapas para Postar No Link.Documento4 páginasMáscara - Trabalho Final Com As 3 Etapas para Postar No Link.kaiqueaugusto481Ainda não há avaliações
- GPS - 3. Edição Do Curso de Formação de FormadoresDocumento17 páginasGPS - 3. Edição Do Curso de Formação de FormadoresRuka Nunes100% (2)
- Relatório de MineraçãoDocumento7 páginasRelatório de MineraçãogabriellAinda não há avaliações
- Ficha de Anaminese Micropigmentação: Cadastro Da (O) ClienteDocumento3 páginasFicha de Anaminese Micropigmentação: Cadastro Da (O) ClienteKassia PontesAinda não há avaliações
- CS14 PDFDocumento1 páginaCS14 PDFAl. Afonso Miguel Lucas Ferreira (AEM)Ainda não há avaliações
- Arquivo Aberto 27 - ItapetingaDocumento38 páginasArquivo Aberto 27 - ItapetingaLuana AmaralAinda não há avaliações
- Plano Maternal I - 2 PeriodoDocumento10 páginasPlano Maternal I - 2 PeriodoJorge Dos Santos100% (1)
- 2sm Quimica Hugo 260320Documento8 páginas2sm Quimica Hugo 260320Katia AraujoAinda não há avaliações
- 06 LIGACAO CUBO-EIXO - Chavetas Rev-CDocumento41 páginas06 LIGACAO CUBO-EIXO - Chavetas Rev-CLuiz Carlos BrandaliseAinda não há avaliações