Você também pode gostar
- Advanced MF250 XEBAIXAFOPDocumento2 páginasAdvanced MF250 XEBAIXAFOPFazenda Não Me Toque0% (1)
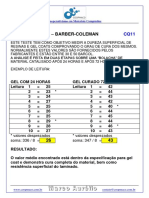
- Dureza Barcol Aplicado No Ensaio de Cura Do Gelcoat PDFDocumento2 páginasDureza Barcol Aplicado No Ensaio de Cura Do Gelcoat PDFNara CamargoAinda não há avaliações
- 2015 - Livro - O Muro. Sartre, JP PDFDocumento112 páginas2015 - Livro - O Muro. Sartre, JP PDFMariana Menezes100% (4)
- Unidade 01 - Classificação Das RodoviasDocumento69 páginasUnidade 01 - Classificação Das RodoviasGustavoAinda não há avaliações
- LICENCIATURA EM BIOTECNOLOGIA MEDICINAL - Escola Superior de SaúdeDocumento1 páginaLICENCIATURA EM BIOTECNOLOGIA MEDICINAL - Escola Superior de SaúdeCarolina LopesAinda não há avaliações
- Ciclo PDCA PDFDocumento8 páginasCiclo PDCA PDFRodrigo Hideo Vieira MakiharaAinda não há avaliações
- Desvendando o DELE - 1 Edição-4Documento64 páginasDesvendando o DELE - 1 Edição-4Macio Gomes KalineAinda não há avaliações
- Menu Pavão LanchesDocumento2 páginasMenu Pavão LanchesAgência NewumoAinda não há avaliações
- MelasmaDocumento61 páginasMelasmavinimarciaAinda não há avaliações
- Cinomose AcDocumento2 páginasCinomose AcEduardo Pacheco da PazAinda não há avaliações
- Lista de Exercicios RM2-Criterios de ResistenciaDocumento2 páginasLista de Exercicios RM2-Criterios de ResistenciaJulio ThibesAinda não há avaliações
- Vulcão KilaueaDocumento15 páginasVulcão KilaueaMariana CostaAinda não há avaliações
- ANEXO 2 - Guia de SSMA para Fornecedores Da Vale - Rev06Documento40 páginasANEXO 2 - Guia de SSMA para Fornecedores Da Vale - Rev06VALÉRIA PEREIRA ViannaAinda não há avaliações
- Eixo Cardan IMEPDocumento14 páginasEixo Cardan IMEPRobrangel100% (3)
- Carreira E Vocação: Interpretação Astrológica de Liz Greene para Bob Dylan, 24 de Maio 1941Documento21 páginasCarreira E Vocação: Interpretação Astrológica de Liz Greene para Bob Dylan, 24 de Maio 1941keandAinda não há avaliações
- Centrament Stabi 520Documento2 páginasCentrament Stabi 520Matheus Do NascimentoAinda não há avaliações
- O PATRIMÔNIO TERRITORIAL ENTRE RECURSO E CAPITAL: A Representação Geoinformacional Como Método de Análise Da Vila de Itaúnas/ES.Documento18 páginasO PATRIMÔNIO TERRITORIAL ENTRE RECURSO E CAPITAL: A Representação Geoinformacional Como Método de Análise Da Vila de Itaúnas/ES.Maisa MazziniAinda não há avaliações
- Simulado 01 (Geografia - 9° Ano - Blog Do Prof. Warles)Documento3 páginasSimulado 01 (Geografia - 9° Ano - Blog Do Prof. Warles)Elga DoriaAinda não há avaliações
- Planilha Calculo de Armadura - Flexao SimplesDocumento5 páginasPlanilha Calculo de Armadura - Flexao SimplesKelitaAinda não há avaliações
- Flora Apícola Serra de PelotasDocumento39 páginasFlora Apícola Serra de PelotasricardoestevamAinda não há avaliações
- Vitamina C - RelatorioDocumento5 páginasVitamina C - RelatorioNúbia GoisAinda não há avaliações
- Passo A Passo Pintura Capacete e AutomotivaDocumento25 páginasPasso A Passo Pintura Capacete e AutomotivamckanekoAinda não há avaliações
- Classe Gramatical - ADVÉRBIODocumento5 páginasClasse Gramatical - ADVÉRBIOTatiana UlianAinda não há avaliações
- Helena Petrovna BlavatskyDocumento10 páginasHelena Petrovna BlavatskyAndrews GalindoAinda não há avaliações
- FISPQ Lava RoupasDocumento5 páginasFISPQ Lava RoupasGlauco BragaAinda não há avaliações
- Ebook SaltoquanticoDocumento25 páginasEbook Saltoquanticolucile80% (5)
- Briefing Arquitetônico Residencial: Dados Do ClienteDocumento10 páginasBriefing Arquitetônico Residencial: Dados Do ClienteLeticia MyrielleAinda não há avaliações
- Publicação EventoDocumento1.017 páginasPublicação EventoJoice Marielle100% (1)
- Caderno Didático Fonética e Fonologia Do PortuguêsDocumento55 páginasCaderno Didático Fonética e Fonologia Do PortuguêsRodrigo LuzAinda não há avaliações
- Corpos em Queda LivreDocumento2 páginasCorpos em Queda LivreEuclidesAinda não há avaliações