Você também pode gostar
- Apostila - CLP - Lista de InstruçõesDocumento17 páginasApostila - CLP - Lista de InstruçõesAndré Luiz Silva PereiraAinda não há avaliações
- Revista Nei Marco Abril 2018 Final PDFDocumento84 páginasRevista Nei Marco Abril 2018 Final PDFFlavio SoAinda não há avaliações
- Como Criar Componentes No Software FritzingDocumento11 páginasComo Criar Componentes No Software FritzingAdir Figueiredo100% (1)
- Maquete Alto FornoDocumento1 páginaMaquete Alto FornoLuis BarboAinda não há avaliações
- Manual Fluidsim 3.6Documento301 páginasManual Fluidsim 3.6Nilton Fornaciari50% (2)
- Monografia TCC MecatrônicaDocumento34 páginasMonografia TCC MecatrônicaJay SilveraAinda não há avaliações
- Desenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoNo EverandDesenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoAinda não há avaliações
- Automação PneumáticaDocumento73 páginasAutomação PneumáticaCarlosSilva100% (1)
- Apostila Prog Ladder Com ExerciciosDocumento25 páginasApostila Prog Ladder Com Exercicioskirck1972Ainda não há avaliações
- Acionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoNo EverandAcionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoAinda não há avaliações
- Apostila - Eletronica Digital PDFDocumento52 páginasApostila - Eletronica Digital PDFDaniel Barbosa MotaAinda não há avaliações
- Regulamento - II Inter SESI de Robótica PDFDocumento16 páginasRegulamento - II Inter SESI de Robótica PDFAssis SouzaAinda não há avaliações
- Apostila SoldagemDocumento63 páginasApostila SoldagemelyfreeAinda não há avaliações
- Manual Rapido d2 v2 2Documento18 páginasManual Rapido d2 v2 2BURTIN MAQUINASAinda não há avaliações
- SERVOACIONAMENTOS-Com Sensores - MCTR AtualDocumento8 páginasSERVOACIONAMENTOS-Com Sensores - MCTR AtualEsrom VitorianoAinda não há avaliações
- TCC - Faculdade de Tecnologia Ítalo Bologna - SenaiDocumento16 páginasTCC - Faculdade de Tecnologia Ítalo Bologna - SenaiRenato Hernane Machado0% (1)
- Soldagem Mig-MagDocumento78 páginasSoldagem Mig-MagAntonio Domingos DiasAinda não há avaliações
- PDFDocumento123 páginasPDFEmilly NunesAinda não há avaliações
- Automação de Caldeiras Fiedler PDFDocumento16 páginasAutomação de Caldeiras Fiedler PDFAdriano Pantaroto100% (1)
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Manual Git 2.0Documento28 páginasManual Git 2.0ALEXCILCO100% (1)
- Exercícios Med Grand MecDocumento10 páginasExercícios Med Grand MecRafael MironAinda não há avaliações
- Placa de Identificação Motores WEGDocumento1 páginaPlaca de Identificação Motores WEGAndré Zardo CruberAinda não há avaliações
- Cursowordpress CFB v1 - 0 PDFDocumento69 páginasCursowordpress CFB v1 - 0 PDFDaniel ReisAinda não há avaliações
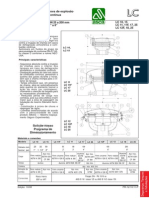
- Valvula Guilhotina BVDocumento5 páginasValvula Guilhotina BVCelio CostaAinda não há avaliações
- Aula 2 - Ambiente de Aula - Arduino e TinkercadDocumento8 páginasAula 2 - Ambiente de Aula - Arduino e TinkercadFioAinda não há avaliações
- Proline Promag 50H, 53H: Informação TécnicaDocumento44 páginasProline Promag 50H, 53H: Informação TécnicaDavanssoAinda não há avaliações
- Catalogo White MartinsDocumento34 páginasCatalogo White MartinsLinconl LucenaAinda não há avaliações
- Imagem Explodida - Posicionador Ub10r - Yt1000r - Rotativo PDFDocumento1 páginaImagem Explodida - Posicionador Ub10r - Yt1000r - Rotativo PDFGustavo OliveiraAinda não há avaliações
- Catálogo Yamaho-2021Documento32 páginasCatálogo Yamaho-2021Marcelo PintoAinda não há avaliações
- Onboarding IHM WeintekDocumento6 páginasOnboarding IHM WeintekMAFEGOAinda não há avaliações
- WEG Referencia Rapida Parametros 10003992710 SSW900 PTDocumento28 páginasWEG Referencia Rapida Parametros 10003992710 SSW900 PTAndreza Ferreira100% (1)
- Construa Seu Próprio ArduinoDocumento8 páginasConstrua Seu Próprio ArduinoYvombek RebelloAinda não há avaliações
- Exercicios 2 Motor CC Derivacao PDFDocumento4 páginasExercicios 2 Motor CC Derivacao PDFJoca Carlos CumbaneAinda não há avaliações
- FischerDVC6200 ManualDocumento108 páginasFischerDVC6200 ManualRafael CastroAinda não há avaliações
- Aula1 RobóticaDocumento28 páginasAula1 RobóticaJoao AlexAinda não há avaliações
- Calotas de Respiro À Prova de ExplosãoDocumento3 páginasCalotas de Respiro À Prova de ExplosãoWellington S. FrançaAinda não há avaliações
- Algoritmo Pid Padrão IsaDocumento52 páginasAlgoritmo Pid Padrão Isacarlos200643Ainda não há avaliações
- MU SmCodi-4Documento23 páginasMU SmCodi-4ERIQUE SOARES SANTOSAinda não há avaliações
- Autolaser Manual PT PDFDocumento180 páginasAutolaser Manual PT PDFJuscelino SaraivaAinda não há avaliações
- Ficha Tecnica Syntilo 916 PortuguesDocumento2 páginasFicha Tecnica Syntilo 916 PortuguesGilberto GrespanAinda não há avaliações
- A DomoticaDocumento120 páginasA DomoticaRafael MartinsAinda não há avaliações
- Soldagem A PlasmaDocumento4 páginasSoldagem A Plasmaempreendedor_eliteAinda não há avaliações
- Apresentação Treinamento Caldeiras1Documento62 páginasApresentação Treinamento Caldeiras1Luciano Dasilva100% (1)
- Catalogo Torkflex PDFDocumento8 páginasCatalogo Torkflex PDFToni BasilioAinda não há avaliações
- 30032011palestra 03 - CoesterDocumento89 páginas30032011palestra 03 - CoestermullerbarbosaAinda não há avaliações
- Flip FLOPDocumento8 páginasFlip FLOPRoseli DefassioAinda não há avaliações
- Acústica e Vibrações n50 (Amostra)Documento46 páginasAcústica e Vibrações n50 (Amostra)Nayara GevúAinda não há avaliações
- Apostila Do Robo LagesDocumento101 páginasApostila Do Robo LagesCleber Glaucio Souza Freitas100% (1)
- Introducao Processos Soldadura - 2010Documento153 páginasIntroducao Processos Soldadura - 2010vascocarrico68100% (1)
- Como Montar Uma Oficina de BicicletasDocumento34 páginasComo Montar Uma Oficina de BicicletasEliézer LimaAinda não há avaliações
- Compressor PDFDocumento1 páginaCompressor PDFSaid HandalAinda não há avaliações
- Manual de TCC EtecDocumento64 páginasManual de TCC EtecEvit JimenezAinda não há avaliações
- BC Riptronix DRC3 R1Documento3 páginasBC Riptronix DRC3 R1maiquelernAinda não há avaliações
- Aula Usinagem de EngrenagensDocumento45 páginasAula Usinagem de EngrenagensRicardo ColettoAinda não há avaliações
- Desenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandDesenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Informando O Consumo De Energia Por Rs232 Via Protocolo Pima Programado No ArduinoNo EverandInformando O Consumo De Energia Por Rs232 Via Protocolo Pima Programado No ArduinoAinda não há avaliações
- Celulasdecombustivel v2Documento13 páginasCelulasdecombustivel v2Vinicius MarchesiniAinda não há avaliações
- 293833-Prova II de Economia Da EngenhariaDocumento2 páginas293833-Prova II de Economia Da EngenhariaVinicius MarchesiniAinda não há avaliações
- Trabalho Escrito Teste Cpu FibonacciDocumento7 páginasTrabalho Escrito Teste Cpu FibonacciVinicius MarchesiniAinda não há avaliações
- Aplicando Ideias de Marx Na Economia BrasileiraDocumento2 páginasAplicando Ideias de Marx Na Economia BrasileiraVinicius MarchesiniAinda não há avaliações
- ApostilaEconomiaDeEngenharia 2008Documento141 páginasApostilaEconomiaDeEngenharia 2008Vinícius Lazzeres NovatzkiAinda não há avaliações
- Aplicando Ideias de Marx Na Economia BrasileiraDocumento2 páginasAplicando Ideias de Marx Na Economia BrasileiraVinicius MarchesiniAinda não há avaliações
- (Segundo Trabalho) First ClassDocumento12 páginas(Segundo Trabalho) First ClassVinicius MarchesiniAinda não há avaliações
- (Vinicius P Marchesini) Resumo Do Livro Guia de Sobrevivência Do EmpreendedorDocumento7 páginas(Vinicius P Marchesini) Resumo Do Livro Guia de Sobrevivência Do EmpreendedorVinicius MarchesiniAinda não há avaliações
- (Vinicius P Marchesini) Resumo Do Livro Guia de Sobrevivência Do EmpreendedorDocumento7 páginas(Vinicius P Marchesini) Resumo Do Livro Guia de Sobrevivência Do EmpreendedorVinicius MarchesiniAinda não há avaliações
- Manual Do Usuário LKGPS LK209 GPS Tracker - Manuais +Documento29 páginasManual Do Usuário LKGPS LK209 GPS Tracker - Manuais +João LuisAinda não há avaliações
- Manual Técnico de Utilização e Validação de Código Postal.Documento22 páginasManual Técnico de Utilização e Validação de Código Postal.Filmes HD LançamentosAinda não há avaliações
- Manual de Documentação de Procedures PDFDocumento41 páginasManual de Documentação de Procedures PDFmarcella costta100% (1)
- Guia Básico Do Boardmaker Instalação e Criação de Uma PranchaDocumento25 páginasGuia Básico Do Boardmaker Instalação e Criação de Uma PranchaBruna Bührer Cravo MioriAinda não há avaliações
- Padrões Mapas Scania Bosch MS6.2 Eu3Documento25 páginasPadrões Mapas Scania Bosch MS6.2 Eu3Dione Prata100% (2)
- Provas Nivel IntermediarioDocumento77 páginasProvas Nivel Intermediarioraphael.fatec6478Ainda não há avaliações
- Aula 01 - Introducao A PHPDocumento36 páginasAula 01 - Introducao A PHPfernandobernardomundlovo0Ainda não há avaliações
- Ano: 2010 Banca: ADVISE Instituição: SESC-SE Cargo: BiblioteconomistaDocumento125 páginasAno: 2010 Banca: ADVISE Instituição: SESC-SE Cargo: BiblioteconomistaANDRE MIRANDAAinda não há avaliações
- Checklist Primeira Venda 48 HorasDocumento15 páginasChecklist Primeira Venda 48 HorasAdrianoAinda não há avaliações
- (E-Book) Conheça o Vale Do SilícioDocumento33 páginas(E-Book) Conheça o Vale Do SilícioBárbara CavalcantiAinda não há avaliações
- Resumo ISO 27002 - 2005Documento8 páginasResumo ISO 27002 - 2005anycleaAinda não há avaliações
- Ficha t20 Editável v1.8.1Documento1 páginaFicha t20 Editável v1.8.1sr Μ1ŞŦ TM :3Ainda não há avaliações
- Python TutDocumento118 páginasPython TutJayme Tosi NetoAinda não há avaliações
- Perguntas Básicas Do Exame 3CXDocumento9 páginasPerguntas Básicas Do Exame 3CXScribdTranslations100% (1)
- Versão 1 - Plano de Aula AluraDocumento6 páginasVersão 1 - Plano de Aula AluraBruno BritoAinda não há avaliações
- Exercícios Gestão de ProjetosDocumento57 páginasExercícios Gestão de ProjetosMarwyn Gomes85% (34)
- Geoinformação Na SPU - Conceitos, Fundamentos e Tecnologias - Modulo 3Documento4 páginasGeoinformação Na SPU - Conceitos, Fundamentos e Tecnologias - Modulo 3Francisco Alves Camello NetoAinda não há avaliações
- Controlador Programável MPC1600PLUSDocumento67 páginasControlador Programável MPC1600PLUSAutômattos SistemasAinda não há avaliações
- Hierarquia de Documentos para NewGLDocumento15 páginasHierarquia de Documentos para NewGLJusapfiAinda não há avaliações
- Informatica HTML Css 2018Documento123 páginasInformatica HTML Css 2018Nicoly FerreiraAinda não há avaliações
- Status - Messenger e Wallet ETHDocumento4 páginasStatus - Messenger e Wallet ETHjsilvaAinda não há avaliações
- Catalogo Vid8 Outubro 2017Documento65 páginasCatalogo Vid8 Outubro 2017Nori NilopolisAinda não há avaliações
- Apostila Informaaaatica RevisaaaaoDocumento215 páginasApostila Informaaaatica RevisaaaaoIsmael Avila BritesAinda não há avaliações
- Atividade Extra - Fundamentos de RedesDocumento2 páginasAtividade Extra - Fundamentos de RedesLucas G.Ainda não há avaliações
- Codigos de Erros Vb6Documento26 páginasCodigos de Erros Vb6darckmatrix100% (1)
- Ebook Eventos Hibridos e Virtuais 2020 Vfinal 1Documento64 páginasEbook Eventos Hibridos e Virtuais 2020 Vfinal 1Renata GuarinoAinda não há avaliações
- Tecnicas de Edição para Entrevista - PremiereDocumento8 páginasTecnicas de Edição para Entrevista - PremiereJoão Victor RomansiniAinda não há avaliações
- Conteúdos para A ProvaDocumento43 páginasConteúdos para A ProvaCátiaAltíssimoViapianaAinda não há avaliações
- Aula 04 - CLPDocumento59 páginasAula 04 - CLPLaura BeatrizAinda não há avaliações