Você também pode gostar
- Aula IV - Simbologia - Pt2Documento50 páginasAula IV - Simbologia - Pt2Rafael Cabral RebouçasAinda não há avaliações
- Motores SíncronosDocumento17 páginasMotores SíncronosrochaserraAinda não há avaliações
- NBR 10126 - 1987 - Cotagem em Desenho TécnicoDocumento13 páginasNBR 10126 - 1987 - Cotagem em Desenho Técnicotico 43Ainda não há avaliações
- Modos GregosDocumento6 páginasModos GregosesdrasAinda não há avaliações
- Apostila Desenho TécnicoDocumento408 páginasApostila Desenho Técnicotancredodesign100% (2)
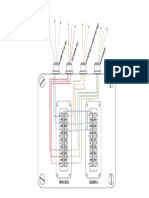
- Projeto Padronização Tomada Videojet 170iDocumento1 páginaProjeto Padronização Tomada Videojet 170iLaerson SilvaAinda não há avaliações
- Projeto Padronização Tomada VideoJetDocumento1 páginaProjeto Padronização Tomada VideoJetLaerson SilvaAinda não há avaliações
- Ivair José de SouzaDocumento15 páginasIvair José de Souzadargor1110% (1)
- Tumba Da Aniquilação - 90 PG - Não RevisadoDocumento93 páginasTumba Da Aniquilação - 90 PG - Não RevisadoWellington Valentin100% (18)
- Avaliação Diagnóstica - 6º AnoDocumento3 páginasAvaliação Diagnóstica - 6º Anosantiagoal100% (4)
- Snake Ficha DDDocumento2 páginasSnake Ficha DDnow iiAinda não há avaliações
- Sebenta - Atletismo 1Documento5 páginasSebenta - Atletismo 1Joao CunhaAinda não há avaliações
- O Analista de Modelos de Negócios 75 Exemplos para Empreendedores Dominarem A Ferramenta LUZ Geração EmpreendedoraDocumento161 páginasO Analista de Modelos de Negócios 75 Exemplos para Empreendedores Dominarem A Ferramenta LUZ Geração EmpreendedoraEmerson RezendeAinda não há avaliações
- CoisaDocumento4 páginasCoisakunterzinhoAinda não há avaliações
- Lista 1 Dce UfcgDocumento107 páginasLista 1 Dce UfcgRoberto de Medeiros0% (1)
- HabilitadosDocumento30 páginasHabilitadosSys AntunesAinda não há avaliações
- Cronograma - Face A Face 2022Documento2 páginasCronograma - Face A Face 2022Pastor Márcio AndréAinda não há avaliações
- Regras e PuniçoesDocumento1 páginaRegras e PuniçoesSamuel Recuero CardosoAinda não há avaliações
- Criação de Personagens e Atualização GURPSDocumento48 páginasCriação de Personagens e Atualização GURPSMarcos ViníciusAinda não há avaliações
- Sociedades Secretas IlluminatiDocumento116 páginasSociedades Secretas IlluminatiAlfredoDurâes100% (2)
- FaçanhasDocumento19 páginasFaçanhasGustavoDCNFAinda não há avaliações
- 2º Semestre Coral Minaz POP - Cronograma e Planejamento 2022 - Documentos GoogleDocumento5 páginas2º Semestre Coral Minaz POP - Cronograma e Planejamento 2022 - Documentos GooglePedro CoelhoAinda não há avaliações
- Apostila de Introdução Ao XadrezDocumento36 páginasApostila de Introdução Ao XadrezNelson SandesAinda não há avaliações
- Midgard LivrodeRegrasDocumento16 páginasMidgard LivrodeRegrasVictor CruzAinda não há avaliações
- Tabela Rápida FeiticeiroDocumento2 páginasTabela Rápida FeiticeirocarolccousenAinda não há avaliações
- Pólo Aquático Objectivos EscalãoDocumento9 páginasPólo Aquático Objectivos EscalãoSiscu Pereira100% (1)
- Alimentos - Imprimir Caça PalavrasDocumento2 páginasAlimentos - Imprimir Caça PalavrasAline Leão do NascimentoAinda não há avaliações
- Breve Verei o Bom JesusDocumento2 páginasBreve Verei o Bom JesusGabriel SousaAinda não há avaliações
- Detonado Digimon World PSX DigievoluçõsDocumento5 páginasDetonado Digimon World PSX Digievoluçõsr4xp25wzsmAinda não há avaliações
- Luciano Mota BastosDocumento40 páginasLuciano Mota BastoschristianAinda não há avaliações
- Linguistica de Texto ImpressoDocumento91 páginasLinguistica de Texto ImpressoCarmem AraujoAinda não há avaliações
- Queimada 8 Ano PDFDocumento2 páginasQueimada 8 Ano PDFjose jesusAinda não há avaliações
- Cartilha BullyingDocumento22 páginasCartilha BullyingMatheus Meechum100% (1)
- Edital Locaisde ProvaDocumento326 páginasEdital Locaisde ProvalalabizunguiAinda não há avaliações
- Guia de Phantasy Star Generation - 1 - P22 (A GAZETA DE ALGOL)Documento2 páginasGuia de Phantasy Star Generation - 1 - P22 (A GAZETA DE ALGOL)LucianoAlmeidaAinda não há avaliações
- Demo de LoopMancer Já Está Disponivel para DownloadDocumento4 páginasDemo de LoopMancer Já Está Disponivel para Downloadd5fd6Ainda não há avaliações
- Criptas & Criaturas RPG 1.0-2Documento423 páginasCriptas & Criaturas RPG 1.0-2lucaslimamoreira6Ainda não há avaliações
- The Sims - ApresentaçãoDocumento10 páginasThe Sims - ApresentaçãoVICTOR SUNBALEAinda não há avaliações
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- Liberdade digital: O mais completo manual para empreender na internet e ter resultadosNo EverandLiberdade digital: O mais completo manual para empreender na internet e ter resultadosNota: 5 de 5 estrelas5/5 (10)
- Guia Definitivo Para Dominar o Bitcoin e as CriptomoedasNo EverandGuia Definitivo Para Dominar o Bitcoin e as CriptomoedasNota: 4 de 5 estrelas4/5 (5)
- Consultoria Especializada e Estratégias De Trade De ForexNo EverandConsultoria Especializada e Estratégias De Trade De ForexAinda não há avaliações
- 365 Ideias De Posts Para Ter Um Instagram De Sucesso!No Everand365 Ideias De Posts Para Ter Um Instagram De Sucesso!Ainda não há avaliações
- Análise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNo EverandAnálise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNota: 4 de 5 estrelas4/5 (4)
- Quero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNo EverandQuero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNota: 5 de 5 estrelas5/5 (26)
- Legislação De Segurança Do Trabalho: Textos SelecionadosNo EverandLegislação De Segurança Do Trabalho: Textos SelecionadosAinda não há avaliações
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNo EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNota: 5 de 5 estrelas5/5 (3)
- Segurança Da Informação DescomplicadaNo EverandSegurança Da Informação DescomplicadaAinda não há avaliações