Você também pode gostar
- Lista 5Documento5 páginasLista 5Zygmund BaumanAinda não há avaliações
- Exercícios Analise3Documento10 páginasExercícios Analise3Clara OliveiraAinda não há avaliações
- Ficha2 2324s1 PropDocumento3 páginasFicha2 2324s1 PropEmília Morgado SantosAinda não há avaliações
- Listas IEDO - ResoluçãoDocumento250 páginasListas IEDO - ResoluçãoAndré Marques da SilvaAinda não há avaliações
- Lista2 CalculoIIDocumento2 páginasLista2 CalculoIICompras VendasAinda não há avaliações
- Lista Edo Primeira Ordem Calculo 3Documento14 páginasLista Edo Primeira Ordem Calculo 3Reginaldo NetoAinda não há avaliações
- Lista Exercicios 2Documento3 páginasLista Exercicios 2Nadyne DiazAinda não há avaliações
- Atividades 002Documento4 páginasAtividades 002exd 02Ainda não há avaliações
- Aula4 e 5Documento6 páginasAula4 e 5Ricardo RibeiroAinda não há avaliações
- Lista 3 SedoDocumento3 páginasLista 3 SedoIzabel FerreiraAinda não há avaliações
- Lista3 - EDODocumento1 páginaLista3 - EDOMarcsAinda não há avaliações
- Lista Edo Primeira Ordem C3 2020.1Documento14 páginasLista Edo Primeira Ordem C3 2020.1Joao HenriqueAinda não há avaliações
- Lista I Com RespostasDocumento4 páginasLista I Com RespostasangelodelamareAinda não há avaliações
- Lista 6 CDIDocumento2 páginasLista 6 CDIjoselitoAinda não há avaliações
- Exercicios PED 2018 0Documento11 páginasExercicios PED 2018 0Zygmund BaumanAinda não há avaliações
- Primeira Lista de ExerciciosDocumento3 páginasPrimeira Lista de ExerciciosSamantha CarlaAinda não há avaliações
- Mat2456 L3 2023Documento7 páginasMat2456 L3 2023Vinicius SoaresAinda não há avaliações
- Lista4 - EDODocumento1 páginaLista4 - EDOMarcsAinda não há avaliações
- Ficha Sistemas de Equacoes 8oDocumento5 páginasFicha Sistemas de Equacoes 8oCatarina PereiraAinda não há avaliações
- Lista 3Documento1 páginaLista 3Gabrielly MarquesAinda não há avaliações
- EDL Lista1Documento9 páginasEDL Lista1Isabella OliveiraAinda não há avaliações
- Lista 1 - Antiderivada - Integral Indefinida - Integral Definida - Teorema Fundamental Do CálculoDocumento2 páginasLista 1 - Antiderivada - Integral Indefinida - Integral Definida - Teorema Fundamental Do CálculoGregorio Tomas GonzagaAinda não há avaliações
- Lista No. 2 (MAT021)Documento4 páginasLista No. 2 (MAT021)nago gerardoAinda não há avaliações
- Exame Matematica AplicadaDocumento10 páginasExame Matematica AplicadaJorge Pedro ArmandoAinda não há avaliações
- Lista Revisao P1Documento4 páginasLista Revisao P1andrecbbarboza11Ainda não há avaliações
- Lista1 Matemática Aplicada1Documento2 páginasLista1 Matemática Aplicada1Nikole MatheusAinda não há avaliações
- Lista 1 de EDODocumento2 páginasLista 1 de EDOronaldo lopesAinda não há avaliações
- Lista 2 EdoDocumento2 páginasLista 2 EdoBassai SantosAinda não há avaliações
- Gabarito P3 Lista5Documento16 páginasGabarito P3 Lista5Leonardo FarinaAinda não há avaliações
- CAME Folha 2Documento1 páginaCAME Folha 2CláudiaCoutinhoAinda não há avaliações
- Exercicios de Cálculo III - 1 Lista - Comp.Documento6 páginasExercicios de Cálculo III - 1 Lista - Comp.Tawany Bitencourt DomingosAinda não há avaliações
- Exercícios - Limite, Continuidade e Derivaas ParciaisDocumento1 páginaExercícios - Limite, Continuidade e Derivaas Parciaisalexandre carvalhoAinda não há avaliações
- 2 - Lista - de - C - Lculo - 2022 - 1 (1Documento2 páginas2 - Lista - de - C - Lculo - 2022 - 1 (1Savio LAinda não há avaliações
- Sistemas LinearesDocumento2 páginasSistemas LinearesThierry RodriguesAinda não há avaliações
- Terceira Lista de ExerciciosDocumento2 páginasTerceira Lista de ExerciciosSamantha CarlaAinda não há avaliações
- PRIMITIVAS - Lista 1 - Integrais - 20231Documento2 páginasPRIMITIVAS - Lista 1 - Integrais - 20231Bruno LuzAinda não há avaliações
- Calculo2 MIPSI2019-20 Folha2Documento3 páginasCalculo2 MIPSI2019-20 Folha2horanvera10Ainda não há avaliações
- Ap2 Calculo Com RespostaDocumento3 páginasAp2 Calculo Com RespostaGlaudestony Aragão FerreiraAinda não há avaliações
- Lista2 GADocumento2 páginasLista2 GACompras VendasAinda não há avaliações
- ListaS5 CalculoA 2020-2Documento2 páginasListaS5 CalculoA 2020-2Yasmin SeloisAinda não há avaliações
- Aula - Integração - 02-22Documento79 páginasAula - Integração - 02-22Lucas MartinsAinda não há avaliações
- Lista 1 Edo AlunosDocumento4 páginasLista 1 Edo AlunosRodrigo FernandesAinda não há avaliações
- Lista 1Documento8 páginasLista 1klaracamel28Ainda não há avaliações
- Listade Integral Definidae Aplicaesde IntegralDocumento2 páginasListade Integral Definidae Aplicaesde IntegralSayonara KarinaAinda não há avaliações
- Lista 7 - ED1 PDFDocumento2 páginasLista 7 - ED1 PDFLucas KEIDIAinda não há avaliações
- Lista 9Documento3 páginasLista 9Ana Clara FilgueirasAinda não há avaliações
- UNIFACS Lista de EDODocumento4 páginasUNIFACS Lista de EDOAlessandro BastosAinda não há avaliações
- Exercicios 0910-2Documento7 páginasExercicios 0910-2João Paulo CAinda não há avaliações
- Lista Calculo1 3Documento1 páginaLista Calculo1 3RodrigoNS_3000Ainda não há avaliações
- Lista Derivadas Com RespostaDocumento2 páginasLista Derivadas Com RespostaMaxmiller AlvarengaAinda não há avaliações
- Lista 11Documento1 páginaLista 11shaferhelioAinda não há avaliações
- Lista 11 de Exercícios - Calculo IDocumento2 páginasLista 11 de Exercícios - Calculo IRoan Souza Dos SantosAinda não há avaliações
- Exercicios EDODocumento4 páginasExercicios EDOFernando AndradeAinda não há avaliações
- ListaderivadaDocumento4 páginasListaderivadaFernando GouvêaAinda não há avaliações
- Lista DerivadaDocumento9 páginasLista DerivadaponeisinhoAinda não há avaliações
- CDI 2 1MAP45 18H VA 22 23 ResDocumento3 páginasCDI 2 1MAP45 18H VA 22 23 ResAndre DuarteAinda não há avaliações
- Gabarito prova1TurmaA1Documento2 páginasGabarito prova1TurmaA1GabrielaSimõesAinda não há avaliações
- Prova 2 2016 2 Sabado PAUTADocumento4 páginasProva 2 2016 2 Sabado PAUTACarlos EduardoAinda não há avaliações
- Lista 6 Derivadas - A Regra Da Cadeia, Derivacao Implicita, Derivadas de Funcoes LogaritmicasDocumento2 páginasLista 6 Derivadas - A Regra Da Cadeia, Derivacao Implicita, Derivadas de Funcoes LogaritmicasBetinho MateusAinda não há avaliações
- Material - Custo de Capital - Eng. EconômicaDocumento30 páginasMaterial - Custo de Capital - Eng. EconômicaJoseilton SouzaAinda não há avaliações
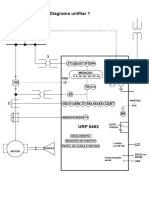
- Diagrama Unifilar 1: Medição TripDocumento2 páginasDiagrama Unifilar 1: Medição TripJoseilton SouzaAinda não há avaliações
- Aula 01Documento29 páginasAula 01Joseilton SouzaAinda não há avaliações
- Manual 3bps CT 803 03 23 Trilingue 1Documento91 páginasManual 3bps CT 803 03 23 Trilingue 1Joseilton SouzaAinda não há avaliações
- Exp - 05.2 - Lab. RemotoDocumento10 páginasExp - 05.2 - Lab. RemotoJoseilton SouzaAinda não há avaliações
- Resultados Experimentais Dos Ensaios Da Maquinas Assincronas 2020-2eDocumento38 páginasResultados Experimentais Dos Ensaios Da Maquinas Assincronas 2020-2eJoseilton SouzaAinda não há avaliações
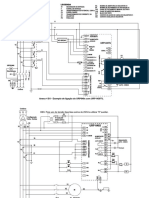
- ANEXO 4 B3 - Exemplo Esquema de Ligação 640x - r02Documento1 páginaANEXO 4 B3 - Exemplo Esquema de Ligação 640x - r02Joseilton SouzaAinda não há avaliações
- Conversão de Ajustes Do Spam 150C para Urp6402Documento4 páginasConversão de Ajustes Do Spam 150C para Urp6402Joseilton SouzaAinda não há avaliações
- Experimento Osciladores Senoidais - OPAMP - UFCG PROFESSOR GUTEMBERG LIRADocumento12 páginasExperimento Osciladores Senoidais - OPAMP - UFCG PROFESSOR GUTEMBERG LIRAMatheus LeorAinda não há avaliações
- Legenda: URP1439TUDocumento2 páginasLegenda: URP1439TUJoseilton SouzaAinda não há avaliações
- Anexo 6 - Curva 10 MinutosDocumento1 páginaAnexo 6 - Curva 10 MinutosJoseilton SouzaAinda não há avaliações
- CN QuartaLista 2020 1eDocumento2 páginasCN QuartaLista 2020 1eJoseilton SouzaAinda não há avaliações
- Anexo 7 - Curva 20 MinutosDocumento1 páginaAnexo 7 - Curva 20 MinutosJoseilton SouzaAinda não há avaliações
- 08 CalibraçãoDocumento2 páginas08 CalibraçãoJoseilton SouzaAinda não há avaliações
- PowerNET P600 G4 Catálogo PDocumento4 páginasPowerNET P600 G4 Catálogo PJoseilton SouzaAinda não há avaliações
- Anexo 8 - Curva 30 MinutosDocumento1 páginaAnexo 8 - Curva 30 MinutosJoseilton SouzaAinda não há avaliações
- Aula 5 - CompetênciasDocumento12 páginasAula 5 - CompetênciasJoseilton SouzaAinda não há avaliações
- Cnumconceitosbasicos 2Documento22 páginasCnumconceitosbasicos 2Joseilton SouzaAinda não há avaliações
- Raizes MBDocumento85 páginasRaizes MBJoseilton SouzaAinda não há avaliações
- CTRL Digital c3Documento19 páginasCTRL Digital c3Joseilton SouzaAinda não há avaliações
- Osciladores Cristal Modulacao DigitalDocumento150 páginasOsciladores Cristal Modulacao DigitalJoseilton SouzaAinda não há avaliações
- Aula 9 Fourier Filtros Analise Sintese EspectralDocumento161 páginasAula 9 Fourier Filtros Analise Sintese EspectralJoseilton SouzaAinda não há avaliações
- CTRL Digital c8Documento8 páginasCTRL Digital c8Joseilton SouzaAinda não há avaliações
- CTRL Digital c4Documento13 páginasCTRL Digital c4Joseilton SouzaAinda não há avaliações
- 02 - Guias Dos ExperimentosDocumento16 páginas02 - Guias Dos ExperimentosJoseilton SouzaAinda não há avaliações
- CTRL Digital c2Documento17 páginasCTRL Digital c2Joseilton SouzaAinda não há avaliações
- Lista Exercicios Aula-18.1 Inv TriDocumento10 páginasLista Exercicios Aula-18.1 Inv TriJoseilton SouzaAinda não há avaliações
- Exp2 PIDDocumento11 páginasExp2 PIDJoseilton SouzaAinda não há avaliações
- Lista Exercicios Aula-22 Ressonante-ZVSDocumento5 páginasLista Exercicios Aula-22 Ressonante-ZVSJoseilton SouzaAinda não há avaliações
- 06 - Aula 4 - Números Reais - Representação DecimalDocumento16 páginas06 - Aula 4 - Números Reais - Representação DecimalJosé Luiz AndréAinda não há avaliações
- Avaliação III - Calculo NumericoDocumento5 páginasAvaliação III - Calculo NumericoDilson José Lins RabeloAinda não há avaliações
- Exercícios Cálculo IIDocumento3 páginasExercícios Cálculo IIAddison VianaAinda não há avaliações
- Matematica 1391022925Documento33 páginasMatematica 1391022925Paulo SampaioAinda não há avaliações
- Resolução Do Teste de CalculoDocumento2 páginasResolução Do Teste de CalculoFrancelino Artur MaziveAinda não há avaliações
- Cvga - Lista 3Documento2 páginasCvga - Lista 3Jonathas FerreiraAinda não há avaliações
- Ficha 5 Continuidade de Funções 11Documento3 páginasFicha 5 Continuidade de Funções 11Maria Isabel100% (1)
- Progressão Aritmética - Exercícios ResolvidosDocumento4 páginasProgressão Aritmética - Exercícios ResolvidosJulianaFonseca100% (2)
- Sdcont IIIDocumento9 páginasSdcont IIIVinny TukAinda não há avaliações
- Teoria Filas TransparênciaDocumento29 páginasTeoria Filas TransparênciamacfiaAinda não há avaliações
- Apostila Coordenadas Polares Cilindricas EsfericasDocumento10 páginasApostila Coordenadas Polares Cilindricas Esfericashfthtj cgjfjxAinda não há avaliações
- Aula - 06 - Radiologia - Módulo I - Matematica AplicadaDocumento19 páginasAula - 06 - Radiologia - Módulo I - Matematica AplicadaReginaldo CamposAinda não há avaliações
- 23 1 374 609 - Aa2Documento2 páginas23 1 374 609 - Aa2Vinicius MerceisAinda não há avaliações
- Colégio Naval 1971Documento3 páginasColégio Naval 1971MestreLouAinda não há avaliações
- Trabalho 1 Bimestre ExpDocumento4 páginasTrabalho 1 Bimestre ExpRaimar RanieriAinda não há avaliações
- Enuciados Resolucoes ALGA 2000Documento56 páginasEnuciados Resolucoes ALGA 2000Marco NicolauAinda não há avaliações
- OMERJ2014Documento11 páginasOMERJ2014rfaelAinda não há avaliações
- Inequações QuadráticasDocumento5 páginasInequações QuadráticasValdomiro Augusto de Araújo88% (8)
- Métodos Quantitativos - GPME PDFDocumento2 páginasMétodos Quantitativos - GPME PDFDavid MonteiroAinda não há avaliações
- Aula 08 RCDocumento109 páginasAula 08 RCCARLOS HENRIQUEAinda não há avaliações
- Espaço VetorialDocumento23 páginasEspaço VetorialLeonardo diasAinda não há avaliações
- Ficha de Consolidação Do Capítulo Dos Números Reais e InequaçõesDocumento5 páginasFicha de Consolidação Do Capítulo Dos Números Reais e InequaçõesmatildesequeiramonteiroAinda não há avaliações
- Exercícios de MDCDocumento10 páginasExercícios de MDCClaudio SilvaAinda não há avaliações
- Sistema de Equações Do 1º Grau - Resolução de Situações ProblemaDocumento26 páginasSistema de Equações Do 1º Grau - Resolução de Situações Problemahru5775lcsAinda não há avaliações
- Métodos Numéricos para Determinação de Raízes Reais de Funções No SciLabDocumento47 páginasMétodos Numéricos para Determinação de Raízes Reais de Funções No SciLabBruno VieiraAinda não há avaliações
- Sol 2 ADocumento1 páginaSol 2 AErland GarciaAinda não há avaliações
- Apostila CDI2 2013 01 PDFDocumento226 páginasApostila CDI2 2013 01 PDFGutemberg AlvesAinda não há avaliações
- Tabela QuadricasDocumento2 páginasTabela Quadricaschavez_ricAinda não há avaliações
- Lista 2Documento4 páginasLista 2luana gomesAinda não há avaliações
- Teorema Do Núcleo e Da ImagemDocumento3 páginasTeorema Do Núcleo e Da ImagemGabriel GouveiaAinda não há avaliações