Você também pode gostar
- Comprovante 1Documento1 páginaComprovante 1João Vitor da SilvaAinda não há avaliações
- Folheto VPDocumento3 páginasFolheto VPJoão Vitor da SilvaAinda não há avaliações
- Ebook Osciloscopio Curso Erechim RSDocumento44 páginasEbook Osciloscopio Curso Erechim RSJoão Vitor da Silva100% (1)
- Manual FRANCESES Junho 2016 Flavio XavierDocumento270 páginasManual FRANCESES Junho 2016 Flavio XavierJoão Vitor da SilvaAinda não há avaliações
- Cambio ZF16S 221 - ZF16S 221od - ZF16S 2280od - ZF16S 2320TD - ZF16S 232TD - ZF16S 2325TD - ZF16S 2521to - ZF16S 2525to Descrição de ServiçoDocumento50 páginasCambio ZF16S 221 - ZF16S 221od - ZF16S 2280od - ZF16S 2320TD - ZF16S 232TD - ZF16S 2325TD - ZF16S 2521to - ZF16S 2525to Descrição de ServiçoJoão Vitor da SilvaAinda não há avaliações
- Orçamento E-Commerce, Formato 2.Documento3 páginasOrçamento E-Commerce, Formato 2.João Vitor da SilvaAinda não há avaliações
- Aula 09 Desvendando A Rede CANDocumento82 páginasAula 09 Desvendando A Rede CANJoão Vitor da Silva100% (1)
- 2013 - 10 BMW Relatório de Diagnóstico Do Veículo - WBAWX310XE0G24708 - 20221219131822Documento6 páginas2013 - 10 BMW Relatório de Diagnóstico Do Veículo - WBAWX310XE0G24708 - 20221219131822João Vitor da SilvaAinda não há avaliações
- Diagnóstico AutomotivoDocumento54 páginasDiagnóstico AutomotivoJoão Vitor da Silva100% (4)
- Alunos Que Não Tem o CPF No Sistema EscolarDocumento4 páginasAlunos Que Não Tem o CPF No Sistema EscolarJoão Vitor da SilvaAinda não há avaliações
- PDF Aula Sensor de Rotação & FaseDocumento13 páginasPDF Aula Sensor de Rotação & FaseJoão Vitor da Silva100% (1)
- Falha Gases Escape - Man24280Documento3 páginasFalha Gases Escape - Man24280João Vitor da SilvaAinda não há avaliações
- Tabela Torque Palio Fire10Documento1 páginaTabela Torque Palio Fire10João Vitor da SilvaAinda não há avaliações
- Sábado Letivo - HumanasDocumento1 páginaSábado Letivo - HumanasJoão Vitor da Silva100% (1)
- Injetores Hilux - 6 Fios 2012 A 2015-1Documento2 páginasInjetores Hilux - 6 Fios 2012 A 2015-1ruan pereira100% (4)
- Geren - Eletroventiladores e AcDocumento9 páginasGeren - Eletroventiladores e AcJoão Vitor da SilvaAinda não há avaliações
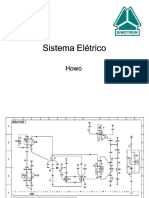
- Esquema Eletrico SinotrukDocumento25 páginasEsquema Eletrico SinotrukJoão Vitor da Silva67% (3)
- Aula 2 - Projeto de Instalações Elétricas Prediais, Seguindo Padrão de Eficiência EnergéticaDocumento99 páginasAula 2 - Projeto de Instalações Elétricas Prediais, Seguindo Padrão de Eficiência EnergéticaElton FlorentinoAinda não há avaliações
- Manual de Instrução de Instalação e Operação Serra Fita Hsf3Documento21 páginasManual de Instrução de Instalação e Operação Serra Fita Hsf3ellijahAinda não há avaliações
- NBR 14039 Comentada Instalacoes Eletrica de Media TensaoDocumento207 páginasNBR 14039 Comentada Instalacoes Eletrica de Media TensaoLaura Rita MariaAinda não há avaliações
- Modelo de Laudo TécnicoDocumento4 páginasModelo de Laudo TécnicoUilmo Carneiro100% (2)
- Treinamento - Pop - ObrasDocumento110 páginasTreinamento - Pop - ObraskaianepedrosoAinda não há avaliações
- Guia de Boas Praticas SwitchesDocumento10 páginasGuia de Boas Praticas SwitchesDiego AndersonAinda não há avaliações
- Catalogo Cadweld PDFDocumento72 páginasCatalogo Cadweld PDFdnps2011100% (1)
- Terrometro EM5248Documento2 páginasTerrometro EM5248Sidnei BaumannAinda não há avaliações
- AB Relé TérmicoDocumento76 páginasAB Relé Térmicopliniopsa0% (1)
- SarelDocumento36 páginasSarelGianey Fernandes da SilvaAinda não há avaliações
- Transmissão - Agroenergia PDFDocumento19 páginasTransmissão - Agroenergia PDFMarcio EstacheskiAinda não há avaliações
- Técnicas de CongelamentoDocumento41 páginasTécnicas de CongelamentoSidney ChristAinda não há avaliações
- Ar Condicionado Portatil Elgin EleganceDocumento36 páginasAr Condicionado Portatil Elgin Elegancemarcelo cardoso0% (1)
- Segurança em QE e As Novas Regras TécnicasDocumento4 páginasSegurança em QE e As Novas Regras TécnicasheliopintoAinda não há avaliações
- Monitor de Aterramento 2Documento2 páginasMonitor de Aterramento 2beckckerAinda não há avaliações
- Waterflux 3070 V2 - ManualDocumento82 páginasWaterflux 3070 V2 - ManualTruman GonzalezAinda não há avaliações
- Apostila de Eletricidade CC & CA-1-79Documento79 páginasApostila de Eletricidade CC & CA-1-79MoisésAinda não há avaliações
- Integradora 9270 XNDocumento124 páginasIntegradora 9270 XNBeatrizAinda não há avaliações
- Autopower 2016 - SPDA NBR 5419-2015 - DocumentacaoDocumento23 páginasAutopower 2016 - SPDA NBR 5419-2015 - DocumentacaoFábio Daniel HadadAinda não há avaliações
- BB 01 ManualDocumento2 páginasBB 01 ManualPaulo DanielAinda não há avaliações
- Fumarc TJMG - EngDocumento24 páginasFumarc TJMG - EngVitor RochaAinda não há avaliações
- Modelo de Laudo de Maquina NR12Documento32 páginasModelo de Laudo de Maquina NR12Robson88% (8)
- Motor HVP e HO-HSING - Manual de Instrucoes PDFDocumento77 páginasMotor HVP e HO-HSING - Manual de Instrucoes PDFAnis NurjanahAinda não há avaliações
- Inspeção de Tubos de Troca Térmica Pelo Ensaio IRISDocumento17 páginasInspeção de Tubos de Troca Térmica Pelo Ensaio IRISCarlos BernussiAinda não há avaliações
- Construindo Um Filtro de LinhaDocumento6 páginasConstruindo Um Filtro de LinhaTobias MuggeAinda não há avaliações
- APR ChesfDocumento6 páginasAPR ChesfJosé HaislanAinda não há avaliações
- Aterramento ElétricoDocumento49 páginasAterramento ElétricoJohnatan A. Rodrigues100% (5)
- DM705 - Manual Do ProdutoDocumento148 páginasDM705 - Manual Do ProdutoALESSANDRO SOUZA DE OLIVEIRAAinda não há avaliações
- CEB NTB 2.04 - Padrao de Conexoes para Rede de Distribuicao Aerea - Rda - 1a. RevisaoDocumento45 páginasCEB NTB 2.04 - Padrao de Conexoes para Rede de Distribuicao Aerea - Rda - 1a. RevisaoFelipe Junio Brandão100% (1)
- Procedimento Operacional Boyles C5 E C6 (Sobre Trailer) E C5C E C6C (Sobre Esteira)Documento282 páginasProcedimento Operacional Boyles C5 E C6 (Sobre Trailer) E C5C E C6C (Sobre Esteira)Fernando EcleticoAinda não há avaliações