Você também pode gostar
- Algoritmos de aproximação linear para ONLIMDocumento40 páginasAlgoritmos de aproximação linear para ONLIMdel386Ainda não há avaliações
- Aproximação Externa ONLIMDocumento34 páginasAproximação Externa ONLIMdel386Ainda não há avaliações
- Programação InteiraDocumento21 páginasProgramação InteiraBruno ReisAinda não há avaliações
- 5 Algoritmos HibridosDocumento30 páginas5 Algoritmos Hibridosdel386Ainda não há avaliações
- Otimzacao GRRexcelDocumento12 páginasOtimzacao GRRexcelRaphael CostaAinda não há avaliações
- Programação Linear InteiraDocumento62 páginasProgramação Linear InteiraArnaldo Araújo100% (4)
- Fundamentos Matemáticos da Programação LinearDocumento47 páginasFundamentos Matemáticos da Programação LinearAndré Souza100% (1)
- Aula 07Documento6 páginasAula 07IsadoraAinda não há avaliações
- Introdução À Otimização Convexa.Documento71 páginasIntrodução À Otimização Convexa.GuilhermeVBAinda não há avaliações
- Aula 06Documento7 páginasAula 06IsadoraAinda não há avaliações
- Método SimplexDocumento6 páginasMétodo SimplexJaqueline OliveiraAinda não há avaliações
- Resolução de modelos PL pelo método gráficoDocumento4 páginasResolução de modelos PL pelo método gráficoEmanuel CalvoAinda não há avaliações
- Trabalho de Métodos Numericos-1Documento38 páginasTrabalho de Métodos Numericos-1Viviane CavalerAinda não há avaliações
- Algoritmo Branch and Bound Nao LinearDocumento6 páginasAlgoritmo Branch and Bound Nao LinearhuamanahuiAinda não há avaliações
- Método de Kansa-RBF para problemas elípticos em domínios circularesDocumento3 páginasMétodo de Kansa-RBF para problemas elípticos em domínios circularesPhilip ApsAinda não há avaliações
- InvestigacaoDocumento24 páginasInvestigacaoFirosa Emília CandrinhoAinda não há avaliações
- Simplexsimplesio 2010Documento15 páginasSimplexsimplesio 2010Nuno Calane100% (2)
- Trabalho 1 de IODocumento13 páginasTrabalho 1 de IOYannick César Marcelino BotãoAinda não há avaliações
- Minimizando Ramificações em Árvores GeradorasNo EverandMinimizando Ramificações em Árvores GeradorasAinda não há avaliações
- Cap 04 Conducao 2d PermDocumento27 páginasCap 04 Conducao 2d PermKarina PingarilhoAinda não há avaliações
- Programação inteira: métodos determinísticosDocumento22 páginasProgramação inteira: métodos determinísticosLuiz VinagreAinda não há avaliações
- Otimização linear usando o método do grande MDocumento24 páginasOtimização linear usando o método do grande MDomingos Euro100% (3)
- Aula 02 Introdução Programação LinearDocumento33 páginasAula 02 Introdução Programação Linearkamilly amancioAinda não há avaliações
- Microsoft Powerpoint - Metodos NumericosDocumento19 páginasMicrosoft Powerpoint - Metodos Numericosjonathan campoberdeAinda não há avaliações
- Plano Estudo Exame PDFDocumento6 páginasPlano Estudo Exame PDFMaria MiguelAinda não há avaliações
- Programação Linear e DecisãoDocumento16 páginasProgramação Linear e Decisãopjf004Ainda não há avaliações
- Silabo2018 MVGA 2Documento2 páginasSilabo2018 MVGA 2babibayAinda não há avaliações
- PO DIEGO UN3 VDocumento23 páginasPO DIEGO UN3 VLuiz VinagreAinda não há avaliações
- Programação linear, inteira e branch and boundDocumento18 páginasProgramação linear, inteira e branch and boundGeovane HenriqueAinda não há avaliações
- Método Dual Simplex para Programação LinearDocumento3 páginasMétodo Dual Simplex para Programação LinearRicardo OliveiraAinda não há avaliações
- NP CompletudeDocumento62 páginasNP CompletudeRubem FigueredoAinda não há avaliações
- Aula - OtimizaçãoDocumento41 páginasAula - OtimizaçãoAdrielle NascimentoAinda não há avaliações
- Métodos de Apoio À DecisãoDocumento3 páginasMétodos de Apoio À DecisãoBruno MotaAinda não há avaliações
- Carolina Palma Naveira Cotta - Métodos Matemáticos em Engenharia MecânicaDocumento97 páginasCarolina Palma Naveira Cotta - Métodos Matemáticos em Engenharia Mecânicat1000Ainda não há avaliações
- Ferramentas Excel resolução problemas matemáticos técnicosDocumento307 páginasFerramentas Excel resolução problemas matemáticos técnicosAlexandre ItoAinda não há avaliações
- Trabalho de Io Grupo Nº5Documento10 páginasTrabalho de Io Grupo Nº5Helena EtiambuloAinda não há avaliações
- Módulo 6Documento42 páginasMódulo 6lucaslucas10Ainda não há avaliações
- Tópicos - Exame de Qualificação MestradoDocumento3 páginasTópicos - Exame de Qualificação Mestradoovomaltino54Ainda não há avaliações
- Branch-and-Bound: algoritmo de divisão e conquista para ONLIMDocumento69 páginasBranch-and-Bound: algoritmo de divisão e conquista para ONLIMdel386Ainda não há avaliações
- Quadratura Gaussiana: Fórmulas de Newton-CotesDocumento1 páginaQuadratura Gaussiana: Fórmulas de Newton-CotesAmorine Fernanda Matos de MeloAinda não há avaliações
- Matrizes Determinantes Sistemas e ProgressõesDocumento128 páginasMatrizes Determinantes Sistemas e ProgressõesJokerAinda não há avaliações
- Aplicações de Derivadas: Taxas, Máximos, Mínimos e L'HôpitalDocumento20 páginasAplicações de Derivadas: Taxas, Máximos, Mínimos e L'HôpitalCelso moianeAinda não há avaliações
- Ensino a Distância de Matemática ADocumento4 páginasEnsino a Distância de Matemática ADomingos PinhoAinda não há avaliações
- Programação Linear: Teoria, Métodos e AplicaçõesDocumento15 páginasProgramação Linear: Teoria, Métodos e AplicaçõesEdson MiguelAinda não há avaliações
- Otimizacao Sistemas NlinearesDocumento19 páginasOtimizacao Sistemas NlinearesRomes BorgesAinda não há avaliações
- Artigo Simone PDFDocumento30 páginasArtigo Simone PDFHiroshi MurofushiAinda não há avaliações
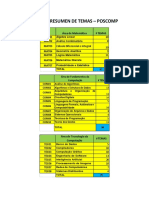
- Resumo de temas da POSCOMPDocumento9 páginasResumo de temas da POSCOMPpiczkiAinda não há avaliações
- Analise de Sensibilidade em Programacao Linear - 2022..Documento13 páginasAnalise de Sensibilidade em Programacao Linear - 2022..luis cassimooAinda não há avaliações
- LivroDocumento117 páginasLivroALEX Ferreira vieiraAinda não há avaliações
- Cesar Duarte Alves Da Rocha: Departamento de Matemática Aplicada Junho de 2001Documento49 páginasCesar Duarte Alves Da Rocha: Departamento de Matemática Aplicada Junho de 2001Vagner CostaAinda não há avaliações
- Matriz TesteSPM 12anoDocumento4 páginasMatriz TesteSPM 12anoxelipi5879ippalsAinda não há avaliações
- Quadratura de Gauss - LegendreDocumento12 páginasQuadratura de Gauss - Legendretrevisan1000Ainda não há avaliações
- Relatorio FinalDocumento14 páginasRelatorio FinalJeverson SantosAinda não há avaliações
- Spm@Testes: Matriz de Referência 12.º AnoDocumento4 páginasSpm@Testes: Matriz de Referência 12.º AnoNocasAinda não há avaliações
- Modelagem da dinâmica de estruturas flexíveis por MEFDocumento175 páginasModelagem da dinâmica de estruturas flexíveis por MEFpedro paivaAinda não há avaliações
- Vibrações Mecânicas-6Documento63 páginasVibrações Mecânicas-6Lucio MenegattiAinda não há avaliações
- Dossier Do ProfessorDocumento212 páginasDossier Do ProfessorGustavo Lapo100% (2)
- Métodos Numéricos: Exercícios Resolvidos Aplicados à Engenharia e outras CiênciasDocumento202 páginasMétodos Numéricos: Exercícios Resolvidos Aplicados à Engenharia e outras Ciênciasrafaelsbispo100% (1)
- Programação Matemática: Otimização Linear e Não LinearNo EverandProgramação Matemática: Otimização Linear e Não LinearAinda não há avaliações
- EXERCÍCIOS RESOLVIDOS PROBLEMAS DE EQUAÇÃO DO 1º GrauDocumento25 páginasEXERCÍCIOS RESOLVIDOS PROBLEMAS DE EQUAÇÃO DO 1º GrauJose Carlos Ferreira De Sá71% (7)
- Dissociação e ionização: ácidos, classificação e nomenclaturaDocumento3 páginasDissociação e ionização: ácidos, classificação e nomenclaturaIzaias 02Ainda não há avaliações
- Contabilidade BásicaDocumento123 páginasContabilidade BásicaPatricia De Sousa SantosAinda não há avaliações
- Modelo puntal-tensor aplicado al diseño de muros de hormigón armadoDocumento178 páginasModelo puntal-tensor aplicado al diseño de muros de hormigón armadolalo198Ainda não há avaliações
- Introdução à Linguagem CDocumento34 páginasIntrodução à Linguagem CFernando Luiz Do AmaralAinda não há avaliações
- GLT 32Documento11 páginasGLT 32Marcelo ProtzAinda não há avaliações
- Trabalho Realismo Não-RepresentativoDocumento9 páginasTrabalho Realismo Não-RepresentativoCaligo Beltrão100% (1)
- Livro de FisicaDocumento422 páginasLivro de FisicaGraciele SouzaAinda não há avaliações
- ANEEL PRODIST Módulo 8 Qualidade EnergiaDocumento89 páginasANEEL PRODIST Módulo 8 Qualidade EnergiaHeitor B. S. BezerraAinda não há avaliações
- Sistemas de unidades e conversõesDocumento2 páginasSistemas de unidades e conversõespauloAinda não há avaliações
- Matrizes e Sistemas LinearesDocumento43 páginasMatrizes e Sistemas LinearesfpreisAinda não há avaliações
- Cálculo de PredicadosDocumento11 páginasCálculo de PredicadosJoão PereiraAinda não há avaliações
- Estrutura Conceitual Da ContabilidadeDocumento18 páginasEstrutura Conceitual Da ContabilidadeaparagonAinda não há avaliações
- Termodinâmica MáquinasDocumento4 páginasTermodinâmica MáquinasFabio MeisterAinda não há avaliações
- Meditações Sobre A Filosofia Primeira 1Documento13 páginasMeditações Sobre A Filosofia Primeira 1Diogo VilelaAinda não há avaliações
- Custo de viagem para 8 amigos em 9 diasDocumento2 páginasCusto de viagem para 8 amigos em 9 diasclayton souzaAinda não há avaliações
- Aula 1 - Harmonia Prática para GuitarristaDocumento9 páginasAula 1 - Harmonia Prática para GuitarristaGabriel SantosAinda não há avaliações
- Técnicas de amostragem para processamento mineralDocumento34 páginasTécnicas de amostragem para processamento mineralWilson DavaAinda não há avaliações
- Avaliação de Matemática 8o anoDocumento7 páginasAvaliação de Matemática 8o anoJuliana MatosAinda não há avaliações
- Administração Das Escalas Bayley de Desenvolvimento InfantilDocumento7 páginasAdministração Das Escalas Bayley de Desenvolvimento InfantilTati NunesAinda não há avaliações
- Conservação do momento linear para explosão de projétil em 2 fragmentosDocumento25 páginasConservação do momento linear para explosão de projétil em 2 fragmentosEmanuele OliveiraAinda não há avaliações
- GASESDocumento39 páginasGASESJüvinal Pasiensia Simu DeitAinda não há avaliações
- Lista Matematica 1Documento5 páginasLista Matematica 1leticia.reserva80Ainda não há avaliações
- Português - Pré-Vestibular Impacto - Estrutura Do Período Composto - Subordinação IIIDocumento2 páginasPortuguês - Pré-Vestibular Impacto - Estrutura Do Período Composto - Subordinação IIIPortuguês Qui100% (3)
- Calculo de Medicacao em Enferma - TREINE EADDocumento189 páginasCalculo de Medicacao em Enferma - TREINE EADStefane MayanaAinda não há avaliações
- 06 - Teoria Dos Conjuntos - Aula 06 - QuestõesDocumento147 páginas06 - Teoria Dos Conjuntos - Aula 06 - Questõesantoniogildo175Ainda não há avaliações
- Atividades de revisão de matemática do 6o ano do Colégio Militar da PM do AmazonasDocumento2 páginasAtividades de revisão de matemática do 6o ano do Colégio Militar da PM do AmazonasJoão SosaAinda não há avaliações
- Cálculo VetorialDocumento5 páginasCálculo VetorialYan FelipeAinda não há avaliações
- mxm6 Resolmanual Capitulo1Documento16 páginasmxm6 Resolmanual Capitulo1Andreia SantosAinda não há avaliações
- Markov Chain 02.19Documento173 páginasMarkov Chain 02.19Vitor CarvalhoAinda não há avaliações