Você também pode gostar
- Sensor Proximidade Lm567-EsquemaDocumento1 páginaSensor Proximidade Lm567-EsquemaalbertoAinda não há avaliações
- Eletrificador Rural 35 KMDocumento1 páginaEletrificador Rural 35 KMNerci Pollnow100% (2)
- ESR V20 1s PDFDocumento1 páginaESR V20 1s PDFGustavo AghinoniAinda não há avaliações
- Mc68000 Pga PinoutDocumento1 páginaMc68000 Pga PinoutcapoAinda não há avaliações
- Distortion - MXR Distortion III - Layout GüeroDocumento1 páginaDistortion - MXR Distortion III - Layout GüeroTum ManeewatAinda não há avaliações
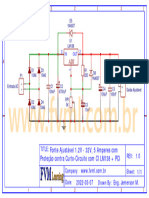
- Schematic - Fonte Ajust├бvel 1.2V - 32V, 5 Amperes, com Prote├з├гo contra Curto-circuitoDocumento1 páginaSchematic - Fonte Ajust├бvel 1.2V - 32V, 5 Amperes, com Prote├з├гo contra Curto-circuitoMarcelo Rodrigues BarbosaAinda não há avaliações
- Esquema 2Documento1 páginaEsquema 2Cutelaria ArtesanalAinda não há avaliações
- Diagrama ElectricoDocumento4 páginasDiagrama ElectricoElvis TapiaAinda não há avaliações
- PinoutDocumento8 páginasPinoutaalegemerAinda não há avaliações
- Zebu ZK50 PDFDocumento1 páginaZebu ZK50 PDFtaynatecAinda não há avaliações
- 1234 PDFDocumento1 página1234 PDFRobson BergamascoAinda não há avaliações
- EsquemaDocumento1 páginaEsquemaLeandro TolosaAinda não há avaliações
- Drboogey Layout GustavoDocumento4 páginasDrboogey Layout GustavoPaulo MagdalenaAinda não há avaliações
- 3 - Multivolt2011Documento1 página3 - Multivolt2011Odair SilvaAinda não há avaliações
- Displays DécimalesDocumento11 páginasDisplays DécimalesCristian TascónAinda não há avaliações
- Esquema TV Philco TV PH21C PDFDocumento8 páginasEsquema TV Philco TV PH21C PDFMarcio Leonardo0% (1)
- TV ph21cDocumento8 páginasTV ph21cKléver GonçalvesAinda não há avaliações
- BoogieDocumento1 páginaBoogiemarcosscaratoAinda não há avaliações
- Clean Booster V2.0Documento3 páginasClean Booster V2.0Tarsilio GuitTarAinda não há avaliações
- New Morley Bad Horsie 2 GueroDocumento1 páginaNew Morley Bad Horsie 2 GueroViniciusPaviaAinda não há avaliações
- BM-5005-400rev1 - Folha 2 de 2Documento1 páginaBM-5005-400rev1 - Folha 2 de 2SmartmedAinda não há avaliações
- Canal Clean 1.5Documento5 páginasCanal Clean 1.5Tarsilio GuitTarAinda não há avaliações
- Lm317 Lm337 Fonte de Alimentação Simétrica EsquemaDocumento1 páginaLm317 Lm337 Fonte de Alimentação Simétrica EsquemaJota BrandãoAinda não há avaliações
- Manual Com Esquema TV Philco Ph14dDocumento8 páginasManual Com Esquema TV Philco Ph14dArturAinda não há avaliações
- 4Documento8 páginas4NatanAinda não há avaliações
- Manual Com Esquema TV Philco Ph14dDocumento8 páginasManual Com Esquema TV Philco Ph14dOrion UrrozAinda não há avaliações
- Manual Com Esquema TV Philco PH14DDocumento8 páginasManual Com Esquema TV Philco PH14DMauricio OliveiraAinda não há avaliações
- Manual Com Esquema TV Philco Ph14dDocumento8 páginasManual Com Esquema TV Philco Ph14dvilanycristinaAinda não há avaliações
- Manual de Montagem ZX Tapper v1Documento9 páginasManual de Montagem ZX Tapper v1Oscar Arthur KoepkeAinda não há avaliações
- Computador 8081Documento1 páginaComputador 8081Francisco Xavier Perez SanjuanAinda não há avaliações
- Acionamento de Válvula Pneumática Por SolenóideDocumento1 páginaAcionamento de Válvula Pneumática Por SolenóidezequinhawinsAinda não há avaliações
- EsquemaDocumento1 páginaEsquemaLeandro TolosaAinda não há avaliações
- Circuito Do Modulador CenturyDocumento1 páginaCircuito Do Modulador CenturydioninhoAinda não há avaliações
- Century-Fonte Chaveada Super ColorDocumento1 páginaCentury-Fonte Chaveada Super ColorAriel Santos100% (1)
- Chairil Umam - 19.01.014.018 Tugas 2Documento1 páginaChairil Umam - 19.01.014.018 Tugas 2Chairil UmamAinda não há avaliações
- Esquema (DIAGRAMAS - COM.BR)Documento6 páginasEsquema (DIAGRAMAS - COM.BR)Renato Luiz TécnicoAinda não há avaliações
- EsquemaDocumento1 páginaEsquemaLeandro TolosaAinda não há avaliações
- Painel Controle Refrigeração GDLDocumento5 páginasPainel Controle Refrigeração GDLrobson bragançaAinda não há avaliações
- Sadowsky PreampDocumento1 páginaSadowsky PreamperendutekAinda não há avaliações
- Tym&Cf Oym Time Table 12.09.2022-1Documento1 páginaTym&Cf Oym Time Table 12.09.2022-1Sudhanshu GuptaAinda não há avaliações
- TK85 V3 Manual de Montagem Mar22Documento13 páginasTK85 V3 Manual de Montagem Mar22Luciano GobboAinda não há avaliações
- Esquemático ProyetoDocumento1 páginaEsquemático ProyetoErnesto Jaramillo DurangoAinda não há avaliações
- Esquema YUP-E 1200VA - PG II 700VA Placa 10.10.126 REV. 4Documento6 páginasEsquema YUP-E 1200VA - PG II 700VA Placa 10.10.126 REV. 4Marcio Antonio MachadoAinda não há avaliações
- BAĞIMSIZ BÖLÜM HesabıDocumento1 páginaBAĞIMSIZ BÖLÜM HesabıEnsar KızılbayAinda não há avaliações
- Huff PuffDocumento1 páginaHuff Puffalsell100% (1)
- Morley Pro Series 2 GueroDocumento1 páginaMorley Pro Series 2 GueroViniciusPaviaAinda não há avaliações
- Placa Ar LG Sheet1Documento1 páginaPlaca Ar LG Sheet1Rafael Marques100% (2)
- Tabelas de Acupuntura (Pontos de Comando)Documento8 páginasTabelas de Acupuntura (Pontos de Comando)CelsioneAinda não há avaliações
- 4 Curso de Eletrônica Básica ParteDocumento22 páginas4 Curso de Eletrônica Básica PartePaulo Celestino de LimaAinda não há avaliações
- Exp Buck - 1Documento2 páginasExp Buck - 1AlexandreAinda não há avaliações
- Tabela 5 Shu AntigosDocumento1 páginaTabela 5 Shu AntigosElenir SantosAinda não há avaliações
- Transmissor FMDocumento1 páginaTransmissor FMFernando PaladinoAinda não há avaliações
- Tym&Cf Oym Time Table 05.09.2022-1Documento1 páginaTym&Cf Oym Time Table 05.09.2022-1Sudhanshu GuptaAinda não há avaliações
- Decoder 7490+4511-7segDocumento1 páginaDecoder 7490+4511-7segalexAinda não há avaliações
- Iniciante Circuitry 016 WRDocumento1 páginaIniciante Circuitry 016 WRAlfredo Meurer JuniorAinda não há avaliações
- Abnt - NBR - 6982 NB 42 - Desenho de Eletronica - Norma Can PDFDocumento6 páginasAbnt - NBR - 6982 NB 42 - Desenho de Eletronica - Norma Can PDFJoão Pastori NetoAinda não há avaliações
- ReceiverDocumento1 páginaReceiveriwan ncoeyAinda não há avaliações
- Manipu 2Documento1 páginaManipu 2Euzelio HenriqueAinda não há avaliações
- Inyector de Señal de AudioDocumento4 páginasInyector de Señal de AudioJorge RomaAinda não há avaliações
- Exercicios MITDocumento1 páginaExercicios MITKetheley BönemannAinda não há avaliações
- Sociologia Crimes VirtuaisDocumento11 páginasSociologia Crimes VirtuaisKetheley BönemannAinda não há avaliações
- Automação Ind4.0 Slides de ApresentaçãoDocumento12 páginasAutomação Ind4.0 Slides de ApresentaçãoKetheley BönemannAinda não há avaliações
- Atividade Filosofia Exercícios ResolvidosDocumento3 páginasAtividade Filosofia Exercícios ResolvidosKetheley BönemannAinda não há avaliações
- Manual Alarme Ma 250 Moto-AlarmeDocumento10 páginasManual Alarme Ma 250 Moto-AlarmeJuliano smaAinda não há avaliações
- Caixa II - PeE - 18 - 02 - 16Documento2 páginasCaixa II - PeE - 18 - 02 - 16Gelson Fernandes FernandesAinda não há avaliações
- Folha PRATICA 4Documento5 páginasFolha PRATICA 4Cleto67% (3)
- Guia 2016Documento105 páginasGuia 2016Pedro XavierAinda não há avaliações
- Anais Do V Seminário Brasileiro Sobre o Pensamento de Jacques EllulDocumento277 páginasAnais Do V Seminário Brasileiro Sobre o Pensamento de Jacques EllulMaria Cristina VendrametoAinda não há avaliações
- Transporte Público Urbano... Perte 07. IntegraçãoDocumento7 páginasTransporte Público Urbano... Perte 07. IntegraçãoGabriel Thiago CarvalhoAinda não há avaliações
- HD X SSD PDFDocumento4 páginasHD X SSD PDFFabricio DornellesAinda não há avaliações
- Tabela ASCIIDocumento4 páginasTabela ASCIILeonardo Zanzotte CalvelheAinda não há avaliações
- Modelo Envio Discente - Atividade ContextualizadaDocumento1 páginaModelo Envio Discente - Atividade ContextualizadaAmanda NascimentoAinda não há avaliações
- Mundo Do Celular Lista de PrecosDocumento16 páginasMundo Do Celular Lista de PrecosFelipe MarlonAinda não há avaliações
- Atendimento A Emergências QuímicasDocumento71 páginasAtendimento A Emergências QuímicasMaria SilvaneideAinda não há avaliações
- Faseamento Das Redes de DistribuiçãoDocumento8 páginasFaseamento Das Redes de DistribuiçãoAlex Barbosa CamiloAinda não há avaliações
- Enem Picos Pi Machado de Assis 15 09Documento10 páginasEnem Picos Pi Machado de Assis 15 09DanielMatematicaColaresAinda não há avaliações
- Piper - PA-31 I II II XL e T1040 Cheyenne PT-BRDocumento261 páginasPiper - PA-31 I II II XL e T1040 Cheyenne PT-BRTatiane Sillva100% (2)
- Ficha Anamnese Capilar..Documento2 páginasFicha Anamnese Capilar..Ana Paula Cunha49% (39)
- 54518705cap-19 - Partida Eletrica CB600FDocumento19 páginas54518705cap-19 - Partida Eletrica CB600Fivanmariano1978Ainda não há avaliações
- RotativasDocumento6 páginasRotativasAnderson AntunesAinda não há avaliações
- Econometria Series FinanceirasDocumento55 páginasEconometria Series FinanceirasVede Teus Berna Manberna100% (1)
- Resgate em PoçoDocumento1 páginaResgate em PoçoCarlos BenicioAinda não há avaliações
- Aulas LajesDocumento11 páginasAulas LajesitalokaiqueAinda não há avaliações
- 20 Programa de Afiliados Rentáveis para Ganhar Dinheiro OnlineDocumento16 páginas20 Programa de Afiliados Rentáveis para Ganhar Dinheiro Onlineluiz reeyAinda não há avaliações
- Sistema PortuguesDocumento70 páginasSistema PortuguesAntónio FerreiraAinda não há avaliações
- Manual de Elaboracao de Projetos Viarios para o Municipio de BH - Publicação 17-11-11Documento175 páginasManual de Elaboracao de Projetos Viarios para o Municipio de BH - Publicação 17-11-11cranfiAinda não há avaliações
- Portugal - 2. Metade Do Seculo XIXDocumento16 páginasPortugal - 2. Metade Do Seculo XIXNelsonMatias100% (1)
- Play Planif Anual 5 AnoDocumento6 páginasPlay Planif Anual 5 Anopipinha33Ainda não há avaliações
- Estrutura de Relatório de Trabalho de CampoDocumento2 páginasEstrutura de Relatório de Trabalho de CampoFlávia Regina CavalcanteAinda não há avaliações
- Gerador de EnergiaDocumento2 páginasGerador de EnergiaLucas Cardoso PinheiroAinda não há avaliações
- LAMINA SubDrive Inline 1100Documento2 páginasLAMINA SubDrive Inline 1100Marcos RighettoAinda não há avaliações
- VPN MikrotikDocumento3 páginasVPN MikrotikJesus AntonioAinda não há avaliações
- Licenciamento Actividade Estabelecimento Apoio SocialDocumento15 páginasLicenciamento Actividade Estabelecimento Apoio SocialManuel DiasAinda não há avaliações
- Consultoria Especializada e Estratégias De Trade De ForexNo EverandConsultoria Especializada e Estratégias De Trade De ForexAinda não há avaliações
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNo EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNota: 5 de 5 estrelas5/5 (3)
- 37 Regras para um Negócio Online de Sucesso: Como Desistir do Seu Emprego, Mudar Para o Paraíso e Ganhar Dinheiro Enquanto DormeNo Everand37 Regras para um Negócio Online de Sucesso: Como Desistir do Seu Emprego, Mudar Para o Paraíso e Ganhar Dinheiro Enquanto DormeNota: 1.5 de 5 estrelas1.5/5 (2)
- Guia Definitivo Para Dominar o Bitcoin e as CriptomoedasNo EverandGuia Definitivo Para Dominar o Bitcoin e as CriptomoedasNota: 4 de 5 estrelas4/5 (5)
- Quero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNo EverandQuero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNota: 5 de 5 estrelas5/5 (26)
- Fundamentos de Segurança da Informação: com base na ISO 27001 e na ISO 27002No EverandFundamentos de Segurança da Informação: com base na ISO 27001 e na ISO 27002Nota: 5 de 5 estrelas5/5 (8)
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- Gerenciamento da rotina do trabalho do dia-a-diaNo EverandGerenciamento da rotina do trabalho do dia-a-diaNota: 5 de 5 estrelas5/5 (2)
- Introdução Às Redes De Computadores: Modelos Osi E Tcp/ipNo EverandIntrodução Às Redes De Computadores: Modelos Osi E Tcp/ipAinda não há avaliações
- Marketing Digital na Prática: Como criar do zero uma estratégia de marketing digital para promover negócios ou produtosNo EverandMarketing Digital na Prática: Como criar do zero uma estratégia de marketing digital para promover negócios ou produtosNota: 4.5 de 5 estrelas4.5/5 (19)
- Sua Primeira Startup: O Guia de Negócios Startup, da Ideia ao LançamentoNo EverandSua Primeira Startup: O Guia de Negócios Startup, da Ideia ao LançamentoAinda não há avaliações
- Blockchain Ethereum: Fundamentos de arquitetura, desenvolvimento de contratos e aplicaçõesNo EverandBlockchain Ethereum: Fundamentos de arquitetura, desenvolvimento de contratos e aplicaçõesAinda não há avaliações
- Lean Game Development: Desenvolvimento enxuto de jogosNo EverandLean Game Development: Desenvolvimento enxuto de jogosAinda não há avaliações
- Trading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaNo EverandTrading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaNota: 5 de 5 estrelas5/5 (1)
- HACKED: O Livro Guia Definitivo De Linux Kali E Hacking Sem Fio Com Ferramentas De Testes De Segurança E DeNo EverandHACKED: O Livro Guia Definitivo De Linux Kali E Hacking Sem Fio Com Ferramentas De Testes De Segurança E DeAinda não há avaliações
- Crie seu mercado no mundo digital: Aprenda a viver de e-commerce com a estratégia que levou inúmeros negócios on-line a sair do zero e ultrapassar os R$ 100 mil em vendas por mêsNo EverandCrie seu mercado no mundo digital: Aprenda a viver de e-commerce com a estratégia que levou inúmeros negócios on-line a sair do zero e ultrapassar os R$ 100 mil em vendas por mêsNota: 4.5 de 5 estrelas4.5/5 (6)
- Liberdade digital: O mais completo manual para empreender na internet e ter resultadosNo EverandLiberdade digital: O mais completo manual para empreender na internet e ter resultadosNota: 5 de 5 estrelas5/5 (10)
- Análise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNo EverandAnálise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNota: 4 de 5 estrelas4/5 (4)
- Email marketing eficaz: Como conquistar e fidelizar clientes com uma newsletterNo EverandEmail marketing eficaz: Como conquistar e fidelizar clientes com uma newsletterNota: 5 de 5 estrelas5/5 (1)