Você também pode gostar
- 30 qzcZXNygugDocumento29 páginas30 qzcZXNygugGuará Ar Condicionado100% (1)
- Seminário - Processo de Fabricação de Amortecedores Automotivos - REV05Documento39 páginasSeminário - Processo de Fabricação de Amortecedores Automotivos - REV05VQuadros0% (1)
- Resumo MerriamDocumento8 páginasResumo MerriamBruno Eduardo Slongo GarciaAinda não há avaliações
- Novo Espaço 11 2020 - Proposta de Teste GlobalDocumento9 páginasNovo Espaço 11 2020 - Proposta de Teste GlobalMaria Da Guia FonsecaAinda não há avaliações
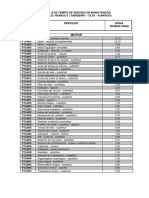
- Tempario Renault LeveDocumento14 páginasTempario Renault LeveDarley Elly Teixeira100% (4)
- A Linguagem Dos NúmerosDocumento52 páginasA Linguagem Dos NúmerosSirlei da Renata100% (1)
- Nardini ND 250 PDFDocumento1 páginaNardini ND 250 PDFWILKENSRANIEL9861Ainda não há avaliações
- CALCULO - III - LISTA - EXERCICIOS - 2 - (Direcional - Gradiente - Rotacional e Divergente) - 20181 PDFDocumento3 páginasCALCULO - III - LISTA - EXERCICIOS - 2 - (Direcional - Gradiente - Rotacional e Divergente) - 20181 PDFCaio Felipe Carvalho100% (1)
- Lista 2 - Geometria Diferencial - Prof. Rodrigo SantosDocumento5 páginasLista 2 - Geometria Diferencial - Prof. Rodrigo SantosRodrigo SantosAinda não há avaliações
- Geo Dif Lista 2Documento2 páginasGeo Dif Lista 2Rodolfo AnunciaçãoAinda não há avaliações
- Lista 2 Geometria DiferencialDocumento2 páginasLista 2 Geometria DiferencialAlvaro Ezequiel Barrios CáceresAinda não há avaliações
- Aula 22Documento25 páginasAula 22Jorge CamposAinda não há avaliações
- Lista 1 - Geometria Diferencial - Prof. Rodrigo SantosDocumento6 páginasLista 1 - Geometria Diferencial - Prof. Rodrigo SantosRodrigo SantosAinda não há avaliações
- CVT Lista4Documento2 páginasCVT Lista4Lucas PereiraAinda não há avaliações
- Lista 04Documento24 páginasLista 04Luiz R. LimaAinda não há avaliações
- CVT Lista1Documento3 páginasCVT Lista1Lucas PereiraAinda não há avaliações
- CalculoDocumento6 páginasCalculoSilas Ribeiro100% (1)
- Lista de Exercícios de Geometria Diferencial (3 )Documento2 páginasLista de Exercícios de Geometria Diferencial (3 )Vinícius FrançaAinda não há avaliações
- Gradiente 1Documento1 páginaGradiente 1Gabriela FeuAinda não há avaliações
- Lista 02Documento2 páginasLista 02Luis ZegarraAinda não há avaliações
- Lista 4 Cálculo BDocumento4 páginasLista 4 Cálculo BMagdAinda não há avaliações
- Teorema de Gauss PDFDocumento18 páginasTeorema de Gauss PDFRaildo LimaAinda não há avaliações
- f3 Extremos 2223Documento4 páginasf3 Extremos 2223hello it'smeAinda não há avaliações
- Frequencia 20-21Documento2 páginasFrequencia 20-21Miguel VasquesAinda não há avaliações
- Geometria Diferencial ComentadaDocumento101 páginasGeometria Diferencial ComentadaItalo AugustoAinda não há avaliações
- Lista3 CVT 2023Documento3 páginasLista3 CVT 2023Pedro LiraAinda não há avaliações
- Exame2 25 1 10Documento2 páginasExame2 25 1 10Vasco MoraisAinda não há avaliações
- 1aListaELETRO120122 PDFDocumento6 páginas1aListaELETRO120122 PDFcarlos eduardo FontouraAinda não há avaliações
- Af1 09recDocumento3 páginasAf1 09recPuto SantanaAinda não há avaliações
- Exame AM2D 8 de Julho 2022Documento2 páginasExame AM2D 8 de Julho 2022Eduardo MendesAinda não há avaliações
- Ficha 3Documento2 páginasFicha 3Andre DuarteAinda não há avaliações
- Lista 9-Regra Da Cadeia-ImplicitaDocumento3 páginasLista 9-Regra Da Cadeia-ImplicitaTainã CorreiaAinda não há avaliações
- VetorialDocumento4 páginasVetorialÍcaro AndréAinda não há avaliações
- Santillana Mat12 Ficharecuperacao 02Documento3 páginasSantillana Mat12 Ficharecuperacao 02Joao Pedro OliveiraAinda não há avaliações
- Lista 2 Geometria DiferencialDocumento2 páginasLista 2 Geometria DiferencialJoão Cleber Pessanha GuedesAinda não há avaliações
- Fazer A Lista Unicamp Calculo II Lista 2Documento8 páginasFazer A Lista Unicamp Calculo II Lista 2Victor1999vAinda não há avaliações
- CVT Lista2Documento3 páginasCVT Lista2Lucas PereiraAinda não há avaliações
- Lista 3 - GD - 2018-2Documento2 páginasLista 3 - GD - 2018-2thassio luan alves rodriguesAinda não há avaliações
- Teorema de Stokes e Gauss Apostila UERJ PDFDocumento18 páginasTeorema de Stokes e Gauss Apostila UERJ PDFLucas Marchetti BragaAinda não há avaliações
- S3 Func Varias Var-CII 2016 17Documento43 páginasS3 Func Varias Var-CII 2016 17Mariana MagalhãesAinda não há avaliações
- F4 Extremos 2022 PDFDocumento4 páginasF4 Extremos 2022 PDFRita AlmeidaAinda não há avaliações
- Lista Mod 2 Lis 4 c3 02 2019Documento8 páginasLista Mod 2 Lis 4 c3 02 2019Matheus RodriguesAinda não há avaliações
- Lista4 CalcDDocumento3 páginasLista4 CalcDLara MachadoAinda não há avaliações
- Cálculo 3 3 ListaDocumento3 páginasCálculo 3 3 ListaMaria Izabel LaraAinda não há avaliações
- CVT Lista5Documento2 páginasCVT Lista5Lucas PereiraAinda não há avaliações
- Aplicação de Massa e Centro de Massa de Um Fio DelgadoDocumento11 páginasAplicação de Massa e Centro de Massa de Um Fio DelgadoAlber Rosa de FigueiredoAinda não há avaliações
- Aved Ficha10 1415vDocumento2 páginasAved Ficha10 1415vjdsP DavidAinda não há avaliações
- Lista de Derivadas Parciais (EE2017)Documento4 páginasLista de Derivadas Parciais (EE2017)RichardLucasAinda não há avaliações
- Lista2 AlgebraLinearDocumento2 páginasLista2 AlgebraLinearmestreweber20Ainda não há avaliações
- Aplicacao Integral - Primeiras AulasDocumento69 páginasAplicacao Integral - Primeiras AulasJúlio CésarAinda não há avaliações
- Aved Ficha9 1415vDocumento2 páginasAved Ficha9 1415vjdsP DavidAinda não há avaliações
- Lista - FB - Focada - 231005 - 103522Documento7 páginasLista - FB - Focada - 231005 - 103522pedroo.jorgeAinda não há avaliações
- Exerci Cio SDocumento3 páginasExerci Cio SWalter Torres MontesAinda não há avaliações
- Lista 3Documento2 páginasLista 3Joseph MartinAinda não há avaliações
- Lista Mod 3 Lis 8 c3 01 2019Documento6 páginasLista Mod 3 Lis 8 c3 01 2019Matheus RodriguesAinda não há avaliações
- Trigonometria e Produto EscalarDocumento3 páginasTrigonometria e Produto EscalarCátia FrançaAinda não há avaliações
- ListaCap4 GA ReisSilva PDFDocumento11 páginasListaCap4 GA ReisSilva PDFAlexsandra AyshaAinda não há avaliações
- Provas Do 2º Estágio de Cálculo III - UFCGDocumento9 páginasProvas Do 2º Estágio de Cálculo III - UFCGHélvio Reis AlbuquerqueAinda não há avaliações
- Calculo IIIAula 11Documento6 páginasCalculo IIIAula 11Curso RaízesAinda não há avaliações
- Gauss E StokesDocumento4 páginasGauss E StokesciromoitinhoAinda não há avaliações
- Superfícies - IntroduçãoDocumento2 páginasSuperfícies - IntroduçãoCircuito JavaAinda não há avaliações
- Trabalho de EstatisticaDocumento17 páginasTrabalho de Estatisticamateus cunaAinda não há avaliações
- Gráfico Das Biografias EspíritasDocumento54 páginasGráfico Das Biografias EspíritasLuis Henrique De LimaAinda não há avaliações
- Raciocinio Logico Policia PenalDocumento80 páginasRaciocinio Logico Policia PenalMarcelo AmancioAinda não há avaliações
- Camisa em OrigamiDocumento1 páginaCamisa em OrigamiprofpaulahenriquesAinda não há avaliações
- Inmetro Jam72d30 545MBDocumento2 páginasInmetro Jam72d30 545MBDhiones TeodoroAinda não há avaliações
- Den 20 CBDocumento8 páginasDen 20 CBOnildoAinda não há avaliações
- Rele de Nível Finder PDFDocumento18 páginasRele de Nível Finder PDFdiegoferretoAinda não há avaliações
- Linha Tradicional HL - PasquettiDocumento17 páginasLinha Tradicional HL - PasquettiAlan KennedeAinda não há avaliações
- Teorias para A Função Consumo PDFDocumento20 páginasTeorias para A Função Consumo PDFTamaradosAnjos100% (2)
- Prova 1 - 1 Bim Ciências 71 e 72Documento2 páginasProva 1 - 1 Bim Ciências 71 e 72Deisiane De Toni AlvesAinda não há avaliações
- Naiala Fidelis Gomes - MSCDocumento197 páginasNaiala Fidelis Gomes - MSCLuciano JuniorAinda não há avaliações
- Relatório de Física! ofDocumento7 páginasRelatório de Física! ofAstronáuta AstroAinda não há avaliações
- Alexandre Herculano - DeusDocumento5 páginasAlexandre Herculano - DeusfelipedenardiAinda não há avaliações
- Atividade IA DUPLA 06 02 2023 ALUNO-1-1 PDFDocumento4 páginasAtividade IA DUPLA 06 02 2023 ALUNO-1-1 PDFMaria FrancoAinda não há avaliações
- SomDocumento115 páginasSomMarcelo MiyanoAinda não há avaliações
- NBR 12067 - Vidro Plano - Determinacao Da Resistencia A Tracao Na FlexaoDocumento3 páginasNBR 12067 - Vidro Plano - Determinacao Da Resistencia A Tracao Na FlexaoMarcos Aurélio RibeiroAinda não há avaliações
- Fisica Regular Aluno Autoregulada 1s 3bDocumento34 páginasFisica Regular Aluno Autoregulada 1s 3bEric Teixeira0% (1)
- Transdutores de Temperatura - TermoparDocumento15 páginasTransdutores de Temperatura - TermoparJúlio BorgesAinda não há avaliações
- Concurso Adm Mat 6º Ano 2011 - 2012 CMCGDocumento11 páginasConcurso Adm Mat 6º Ano 2011 - 2012 CMCGIara Sílvia0% (1)
- Aula 1Documento82 páginasAula 1Leonardo MartinsAinda não há avaliações
- A Mulher Gorda - Full ScoreDocumento1 páginaA Mulher Gorda - Full ScoreTahinaRaharyAinda não há avaliações
- Exercícios de Revisão - Mat Basica - 9123 AnosDocumento5 páginasExercícios de Revisão - Mat Basica - 9123 AnosMarcus Swell Brandão MenezesAinda não há avaliações
- Lista1 - Eletrodinamica Classica - JacksonDocumento11 páginasLista1 - Eletrodinamica Classica - JacksonVitor Prestes LuzioAinda não há avaliações