Escolar Documentos
Profissional Documentos
Cultura Documentos
2552-Article Text-7217-1-10-20080422
Enviado por
rodrigo soaresDireitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
2552-Article Text-7217-1-10-20080422
Enviado por
rodrigo soaresDireitos autorais:
Formatos disponíveis
Séries temporais para modelos com parâmetros aleatórios: uma
abordagem bayesiana
Leonilce Mena1 e Marinho Gomes de Andrade Filho2
1
Departamento de Estatística, Universidade Estadual de Maringá, Av. Colombo, 5790, 87020-900, Maringá - Paraná, Brasil.
2
Instituto de Computação de Matemática Computacional, Universidade de São Paulo, C.P. 668. CEP 13560-970, São Carlos -
São Paulo, Brasil. *Autor para correspondência. e-mail: lmena@uem.br
RESUMO. Este trabalho apresenta uma abordagem bayesiana para fazer inferência sobre os
parâmetros de modelos auto-regressivos. Nesse contexto, quando os parâmetros variam de
forma aleatória e independente, adotou-se um modelo hierárquico para descrever a
densidade a posteriori. Uma segunda abordagem supõe que os parâmetros variam de acordo
com um modelo auto-regressivo de primeira ordem; nesse caso a abordagem é vista como
uma extensão do filtro de Kalman, no qual as variâncias dos ruídos são conhecidas. Os
modelos foram analisados usando técnicas de simulação de Monte Carlo e a geração de
amostras das densidades a posteriori permitiram fazer previsões de séries por intermédio das
densidades preditivas Para exemplificar a aplicação dos modelos, consideramos uma série
real correspondente ao preço de ações.
Palavras-chave: processo auto-regressivo, inferência bayesiana, modelo hierárquico, modelo
dinâmico, filtro de Kalman, Gibbs-Sampling, Metropolis-Hasting.
ABSTRACT. Temporal series for random parameter models: a bayesian approach.
This paper presents a Bayesian approach to make inference about the parameters of
autoregressive models. In this context, when the parameters of models are independent and
vary at random we consider a hierarchical model to describe the a posteriori density of
parameters. A second approach assumes that the parameters of model vary according to a
first order autoregressive model. In this case, the proposed approach is seen as an extension
of Kalman filter where the variances of noises are known. The models were analysed using
Monte Carlo simulation techniques and the resulting samples of a posteriori densities
allowed to foresee a data series through predictable densities. Ilustrations with actual data of
a financial series are showed and the two models are evaluated by the quality of the
prediction obtained, emphasizing the best model which represents the data.
Key words: autoregressive process, Bayesian inference, dynamic model, hierarchical model, Kalman
filter, Gibbs-Sampling, Metropolis-Hasting.
bayesianos aplicados para séries com coeficientes
Introdução constantes (Broemeling e Cook, 1993).
Neste trabalho, é aplicado o método Bayesiano
Neste trabalho, o objetivo é formular um
para séries com coeficientes aleatórios, descrevendo
procedimento bayesiano, utilizando simulação de
a utilização e aplicação de um modelo hierárquico
Monte Carlo via Cadeias de Markov para análise e
para modelar uma série temporal na qual as
previsão de séries temporais modeladas por
componentes não observáveis têm uma densidade de
processos auto-regressivos com coeficientes
probabilidade normal cuja média também tem uma
aleatórios denominados processos auto-regressivos
distribuição normal, assegurando-se, assim, que os
generalizados.
coeficientes sejam variáveis aleatórias, mas não
Muitos métodos podem ser utilizados para
independentes. Descreve-se, também, a aplicação de
estimar os parâmetros de um processo auto-
um modelo dinâmico em problemas de previsões, na
regressivo na análise de uma série temporal, tais
qual a série é modelada por uma média que varia no
como: método dos mínimos quadrados, já
tempo, superposta a um ruído aditivo. Essa média é,
amplamente estudados (Box et al., 1994).
por hipótese, uma combinação linear de funções
Um método alternativo de análise e inferência
conhecidas cujos coeficientes são desconhecidos.
nos modelos de séries temporais são os métodos
Acta Scientiarum Maringá, v. 24, n. 6, p. 1745-1753, 2002
1746 Mena e Andrade Filho
Ilustramos a utilidade de nossa técnica, aplicando A análise desses modelos torna-se, geralmente,
o processo auto-regressivo de primeira ordem com intratável quando não existe conjugação entre
coeficiente aleatório para modelagem de uma série distribuição a priori e a função de verossimilhança.
de dados reais na área financeira correspondente ao Nesses casos, métodos de aproximação numérica
preço de ações da Siderúrgica Vale do Rio Doce. Em (Soyer, 1985) ou de simulação devem ser utilizados
nossa análise, mostramos o quanto esses modelos para a obtenção das distribuições a posteriori de
produzem proveitosas informações na previsão de interesse.
observações futuras. Aqui, através de simulação de Monte Carlo via
Cadeia de Markov (MCMC), utilizando o algoritmo
Descrição do modelo Gibbs Sampling (Casella e George, 1992),
Os modelos que estamos trabalhando obtiveram-se as distribuições a posteriori das variáveis
consideram um processo estocástico de interesse e fazemos inferência sobre os
X t ; t = 1, 2,... com distribuição log-normal parâmetros e a previsão de observações futuras para
um processo auto-regressivo de primeira ordem,
denotado por :
com parâmetros aleatórios e variantes no tempo
X t = X θt -t1 ; t = 1, 2,... (1) ajustado por um modelo hierárquico, considerando
a variância do ruído conhecida. Desenvolvemos a
em que θt é um coeficiente cujos valores extensão do modelo considerado por:
descrevem um crescimento ou decrescimento no Yt = θ t y t -1 + ε t ; ε t ~ N(0, τ 2 ) ; (4)
processo. Para produzir uma generalização no 2
τ conhecido
modelo, introduzimos um erro multiplicativo δ t , θ t = λ + ωt ; ω t ~ N(0, γ 2 )
assim temos: γ2 conhecido
θt
λ ~ N(m, S ) ; m , S 2 conhecidos
2
Xt = X δt ;
t −1 t = 1, 2,... (2)
em que, εt e ωt são independentes.
Aplicando o logaritmo natural, em ambos os
lados, em (2) e seja ε t = log(δ t ) nosso modelo
torna-se : Seja a série y = ( y1 , y 2 ,..., y t ) e dado y (t ) ,
(t )
o objetivo é fazermos inferência sobre θ t , λ e
y t = θ t y t −1 + ε t ; t = 1,2,... (3)
previsão de θ t +1 e da observação futura y t +1
def
em que, y t = log( X t ) com yt e εt Denotando a função densidade de θ , dado y
(t )
t
normalmente distribuídos, εt tem média zero e por (
p θt | y (t )
), calculou-se essa densidade
2
variância τ . considerando a função densidade de probabilidade:
Em alguns problemas, é conveniente supormos
que o parâmetro θ t tem característica aleatória. ( ) (
f y t | y t −1,θ t , τ ~ N θ t y t −1 ; τ 2 ) (5)
(Diaz, 1990; Liu, 1995).
Assumindo os θ t' s com densidade de A densidade a priori para λ:
probabilidade normal de média λ e variância γ 2, a
C(λ ) ~ N m; S 2 ( ) (6)
estratégia para assegurar que os θ t' s sejam
dependentes é assumir-se, também, uma Obtemos os resultados:
distribuição de probabilidade para λ , isto é, que λ A função de verossimilhança:
tem distribuição normal com média m e variância
1 y i − λ yi −1 ( )2
( )
t
S 2 conhecidos. p y (t ) | λ = ∏ exp− (7)
Os modelos hierárquicos bayesianos têm sido i =2 2 τi
utilizados em aplicações nas mais diversas áreas do
conhecimento.
Acta Scientiarum Maringá, v. 24, n. 6, p. 1745-1753, 2002
Séries temporais para modelos 1747
τ i = γ 2 y i2−1 + τ 2 Seja a y (t ) = ( y1 , y 2 ,..., y t ) e a
série
seqüência θ
(t ) = (θ ,..., θ ) , e dado y (t ) , nosso
1 t
A densidade a posteriori de λ:
objetivo é fazer inferência sobre θ t , τ , λ e previsão
λ | y (t ) ~ N (mt , S t ) (8) para θ t +1 e y t +1 .
S t −1 y t y t −1 + m t −1 γ t Aplicando o raciocínio utilizado no caso da
mt = variância conhecida, com a função densidade de
S t −1 y 2t −1 + τ t probabilidade:
S t −1γ t f (y t | θ t , τ) ~ N(θ t y t −1 ; τ 2 ) (13)
St =
S t −1 y t2−1 +τt
Considerando as densidades a priori para λ para
τ :
A densidade a posteriori de θt :
(
θ t | y ( t ) ~ N θ *t , ∑ *t ) ∏1 (τ ) ~ IG(α ; β )
∏2 (λ ) ~ N (m; S 2 )
(9)
(14)
τ 2 m t + γ 2 y t y t −1
θ =
*
t
τt Obteve-se:
τ4 τ 2γ 2 A função de verossimilhança de (λ , τ ) :
∑ *t = τ 2 S t + τ
t t
( )
t
1
p y ( t ) | λ, τ = ∏ 1
exp (15)
A densidade preditiva, considerando k passos, i=2
(τ i (τ)) 2
para θ t + k , k ≥ 1 , é dada por:
1 ( y i − λ y i-1 )2
(
θ t + k ~ N mt , S t + γ 2
) (10) −
2 τ i (τ )
A média preditiva de y t + k , dado y
(t ) pode ser
em que
escrita como:
τ i (τ ) = γ 2 y i2−1 + τ 2
ŷ t + k = Ε(λk | y t )y t , ou seja;
A distribuição conjunta a posteriori de λ eτ
yˆ t + k = mt yˆ t =k −1 + (k − 1)S t yˆ t + k −2 ; k ≥ 1 (11) τ − (α +1) β
(
p λ, τ | y ( t ) α ) exp− ×
τ
1
Para o processo auto-regressivo de primeira (τ i (τ)) 2
ordem, com a variância do ruído τ ( )2
1
desconhecida, descreve-se a incerteza sobre essa exp− (λ − m t (τ))2 × (16)
variância considerando uma distribuição a priori para 2S t (τ)
τ:
ε t ~ N(0, τ 2 ) ;
1 t y2 y
2
y t = θ t y t −1 + ε t ;
(12) exp− ∑ i −1
i
− m
τ2 desconhecido 2 i = 2 τ i (τ ) y i −1
θ t = λ + ωt ; ω t ~ N λ, γ 2 ( )
2
γ conhecido Distribuição marginal para τ :
λ ~ N m, S( 2
); 2
m e S conhecidos.
Acta Scientiarum Maringá, v. 24, n. 6, p. 1745-1753, 2002
1748 Mena e Andrade Filho
−1τ − (α +1) e
1 2
+ ∑t y i −1 τ 2 λ + γ 2 y y τ 2 λ + γ 2 y y
S2 i=2
τ i (τ ) V 2 2 t 2t −1 = Ε 2 2 t 2t −1 −
(
p τ | y (t ) ) α 1
× (17)
γ y t −1 + τ γ y t −1 + τ
(τ i (τ)) 2
1 t 2
[(
+ Ε θt | y
(t )
)] 2
β yi y i2−1
exp− exp− ∑ − m
τ 2 i = 2 τ i (τ ) y i −1 para a amostra gerada (τ(j) , λ(j) , j = 1,2, .....M ).
Distribuição condicional para λ: Os valores de Ε(θ t | y ( t ) ) e Ε(λ | y ( t ) ) são
calculados através de simulação de Monte Carlo via
( (t )
p λ | y ,τ α exp-
1
) (λ − mt (τ ))2 (18) cadeia de Markov (MCMC) .
2S t (τ ) Os valores esperados da preditiva para θ t+ k e
y t + k , k ≥ 1 são dados por:
1 t
y2
S t (τ ) = 2 + ∑ t −1 − 1 ;
S
i = 2 τ i (τ )
Ε( θ t + k | y ( t ) ) = Ε(λ | y t ) (21)
m t y y − 1
mt (τ ) = + ∑ i i S t (τ )
( ) (
V θ t + k | y (t ) = V λ | y (t ) + γ 2 )
i =2 τ i (τ )
2
S
Ε(y t + k | y ( t ) ) = Ε(λk )y t (22)
τ i (τ ) = γ 2 2
y t −1 +τ 2
em que
Distribuição condicional para τ :
( )
M
1
( (t )
p τ | y ,λ α ) τ − (α +1) β
exp− ×
Ε λk =
M
∑ λkj
j =1
τ
1
(τ i (τ)) 2
2
exp−
1
(λ − m t (τ))2 × Sˆ λ2 =
1 M ( j)
∑ λ
M − 1 j =1
( ) 2
− λˆ
2S t (τ )
M
1
1 t y 2 y
exp− ∑ i −1 i − m
2
(19)
τˆ =
M
∑τ ( j)
2 i = 2 τ i (τ ) y i −1
j =1
( )
2
1 M ( j)
− τˆ
2
Distribuição condicional para θt : Sˆτ2 = ∑ τ
M − 1 j =1
1
p(θ t | y t , y t −1 , λ, τ) α exp− ^ (θ − θˆ t )
2 (20)
em que M é o tamanho da amostra gerada para
λ( j ) ( j)
t
2∑ e τ através de simulação de Monte Carlo
t
via Cadeias de Markov.
em que Como outra alternativa, apresentou-se uma
τ 2 λ + γ 2 y y ramificação do processo auto-regressivo de primeira
θ t = Ε(θ t | y (t ) ) = Ε 2 2 t 2t −1
^
ordem com coeficiente aleatório assumindo uma
γ yt −1 + τ estrutura de dependência dos coeficientes do
'
processo estocástico ( θ t s ) tão forte quanto sua
τ γ
( )
2 2
Σˆ t = V θ t | y ( t ) = Ε 2 2 2
permutabilidade. Descrevemos o modelo para uma
γ y t −1 + τ série temporal em função de seus componentes não
Acta Scientiarum Maringá, v. 24, n. 6, p. 1745-1753, 2002
Séries temporais para modelos 1749
Ft : uma quantidade conhecida, denominada, na
observáveis θ t' s quando θt é expresso em função
literatura, como matriz de medida;
dos valores desses mesmos componentes no instante Gt: quantidade conhecida, denominada matriz de
anterior. transição;
Concentrou-se no procedimento pelo qual vt: erro observado assumido, normalmente
obtemos estimadores atualizados dos componentes distribuído, com média zero e variância Vt
não observáveis a todo instante de tempo a partir da conhecida;
informação dada pelo componente observável do wt : erro do sistema com distribuição normal de
sistema, ou seja, y t . Devido, a natureza linear média zero e variância Wt conhecida.
dinâmica do modelo, essa atualização seqüencial Por hipótese, vtv e wt são considerados
pode ser obtida representando o modelo sob a forma independentes entre si e entre estágios subseqüentes.
de espaço de estados e, então, utilizar o modelo filtro O objetivo, aqui, é analisar o comportamento do
de Kalman (Kalman, 1960), cujo procedimento é sistema descrito pelas equações (20) e (21) para
recursivo. avaliar a mudança de comportamento do vetor de
O filtro de Kalman, segundo (Meinhold e parâmetros θ t com o tempo.
Singpurwalla, 1990), proporciona a elaboração de Para atingir esse objetivo, empregou-se a técnica
um algoritmo de estimação recursivo que tem sido filtro de Kalman segundo Meinhold e Singpurwalla
utilizado com sucesso por engenheiros na teoria de (1983), a qual permite atualizar passo-a-passo o valor
controle, e, mais recentemente, por estatísticos e
das médias e matriz de covariância de θ t a medida
econometristas. Descreveu-se a utilização do filtro
de Kalman em problemas de previsão, nos quais a que é feita uma nova observação yt. Esse
série temporal é modelada por uma média que varia procedimento de inferência de θ̂ t (média de θt
no tempo, superposta a um ruído aditivo. Essa
condicionada às observações yt) e matriz de
média é, por hipótese, uma combinação linear de
covariância Σt, permite fazer previsões para a
funções conhecidas cujos coeficientes são
observação futura yt+1.
desconhecidos. Desse modo, a série pode ser
O procedimento pode ser explicado se for
representada por um sistema linear cujo vetor de
considerado o tempo (t-1) e observados os dados até
estados é formado pelos coeficientes desconhecidos
esse tempo y(t-1) = (yt-1, ...,y1).
e pelo valor da média do processo no instante t.
Nessas circunstâncias, o filtro de Kalman pode ser No tempo (t - 1), o conhecimento sobre θ t −1 é
utilizado para obter estimativas ótimas do vetor de dado pela distribuição de probabilidade de θ t −1 , ou
estados, com a vantagem de permitir a variação dos seja:
coeficientes através do tempo.
Seja y (t ) = ( y t , y t −1 ,... y1 ) , denotando os (θ t −1 )
| y ( t −1) ~ N θˆ t −1, ∑ t −1
(25)
valores observados de uma variável de interesse para
diferentes tempos, assumindo que y t depende de que representa a distribuição a posteriori para θ t −1 .
uma quantidade não observável θ t ( yt e θ t podem Considerou-se o desenvolvimento para o tempo t
em dois estágios:
ser escalares ou vetores). Aqui, consideramos θt 1. Antes da observação y t :
como um vetor de parâmetros, com o objetivo de
fazer inferência sobre θ t .
Considerando que a relação entre y t e θ t é
(θ y ( ) ) ~ N G θˆ
t
t −1
t t −1 , ∑ t
(26)
linear e especificada pela equação das observações e a
característica dinâmica da variável não observável é sendo:
θ t , um modelo é caracterizado por ( West e
Harrison, 1997 ): θˆt = Gtθˆt −1 ; ∑ t = Gt' ∑ t −1 Gt + Wt
y t = Ftθ t + vt (23)
Após a observação y t
θ t = Gtθ t −1 + ω t (24)
em que: A função de verossimilhança:
yt : equação observada;
Acta Scientiarum Maringá, v. 24, n. 6, p. 1745-1753, 2002
1750 Mena e Andrade Filho
(e t ) [(
| θ t , y ( t −1) ~ N Ft θ t − G t θˆ t −1 , Vt ) ] (27) Pode-se escrever a função verossimilhança de
como:
λ
A distribuição conjunta de θ t e et , dado y (t −1) −
1
L(λ | y ) = ∏ (y )
t 2
(i −1)
pode ser escrita como: 2
τ +σ
i −1 i
2
exp
∑t ∑ t Ft'
(θ e t | y (t -1) )
'
( )
~ N G t θˆ t −1 0 '
(28) i =1
Ft ∑ t Vt + Ft ∑ t Ft'
t
−
1
(
y i − λθˆi −1 y i −1 )2
A distribuição a posteriori de θ t :
(θ t | e t , y (t −1) ) ~ N(G t θˆ t −1 + ∑ t Ft' (Vt + Ft ∑ t Ft' ) −1 e t ;
(
2 y i −1τ i + σ 2
2
)
(31)
∑ t −∑ t Ft' (Vt + Ft ∑ t Ft' ) −1 Ft ∑ t ) (29) A distribuição conjunta de θt e et pode ser
escrita como:
No modelo filtro de Kalman (Kalman, 1960), as (e t , θ t | y ( t −1) , λ) ~ N(λθˆ t −1 + τ t y t −1 (σ 2 +
quantidades (Ft , Gt , Vt e Wt ) são consideradas (32)
y 2t −1 τ t ) −1 e t ; τ t − y 2t −1 τ t (σ 2 + y 2t −1 τ t ) −1 )
conhecidas. Elas podem variar no tempo somente se
a natureza da variação também for considerada
conhecida. Em muitas aplicações, é difícil A distribuição a posteriori de λ dado y
(t ) :
especificarmos algum ou todos esses parâmetros
devido às informações inadequadas sobre o processo 1
−
ou porque os parâmetros esperados são permutáveis,
( ) ∝ ∏ (y )
t 2
(t )
mas a natureza exata dessa permuta é desconhecida. pλ|y 2
i −1 i τ +σ 2
exp
Nesses casos, o filtro de Kalman é aplicado para i =1
estimar os parâmetros desconhecidos dos dados em
cada estágio, cujos estimadores dos parâmetros
−
(
1
( 2
y i − λθˆ i −1 y i −1 ×
)
) (33)
2 y i −1 τ i + σ
2 2
podem ser obtidos na forma do estimador bayesiano.
Considerando todas as quantidades no modelo
1 2
dado pela equações 23 e 24, como escalares e S −1 exp− 2 (λ − m )
fazendo 2S
Gt = λ , Ft = y t −1 , Vt = ε t e Wt = ω t podemos A distribuição a posteriori de θt dado y
(t ) e λ :
descrever o modelo como:
y t = θ t y t −1 + ε t (30)
( )
1
p(θ t | y ( t ) , λ ) ∝ ∑ t
^ − 1 2 (34)
θ t = λθ t −1 + ω t 2
exp− ^ θ t − θˆ t
2∑ t
em que
εt 0 σ 2 0 λθˆ σ 2 + τ t y t y t −1
~ N ; , θˆt = t −1 2 (35)
γ 2 σ + y t2−1τ t
ω t 0 0
^ τ tσ 2
σ 2
eγ 2
conhecidos. ∑ t= σ 2 + y t2−1τ t
(36)
ε t e ω t são independentes entre
( )
Por hipótese,
si e entre estágios e λ desconhecido é independente
Os valores de E θ t | y
(t )
e E λ|y ( (t )
) são
calculados através de simulação de Monte Carlo em
de ω t .
cadeia de Markov (MCMC) com amostras geradas
Desde que λ é desconhecido, assumiu-se uma pelos algoritmos Gibbs-Sampling e Metropolis-
distribuição a priori para o mesmo. Dado os dados Hasting (Chib e Greenberg, 1995).
y (t ) = ( y t y t −1 ,..., y1 ), o objetivo é fazer A distribuição preditiva para θ t +1 é dada por:
inferência sobre θt e a previsão futura de y t +1 .
Acta Scientiarum Maringá, v. 24, n. 6, p. 1745-1753, 2002
Séries temporais para modelos 1751
uma análise preliminar (análise descritiva) dos dados
( (t )
)
ˆ 2 ^ 2
θ t +1 | y ~ N λθ t , λ Σ t + γ (37) da série de preço das ações da Siderúrgica Vale do
Rio Doce, negociadas em dólares, pela Bovespa, no
período de 2 de janeiro de 1996 a 1 de fevereiro de
em que 1999, considerando a priori informativa normal para
λ e θt .
ˆ λθˆt −1σ 2 + τ t y t y t −1
θt = Tabela 1. Valores a Priori para ajustar a Série
σ 2 + y t2−1τ t
m S γ τ
1,0 0,5 0,65 0,33
τ t = λ 2 ∑ t −1 +γ 2
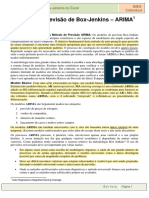
A Figura 1 ilustra o comportamento da série de
dados reais:
^ τ tσ 2 28
∑ t= σ 2 + y t2−1τ t
26
24
y - valo res em dolare s
22
20
A distribuição preditiva para y t +1 18
16
^ 14
( )
y t +1 | y (t ) , λ ~ N λy t θˆ t ; y 2t λ2 ∑ t + γ 2 + σ 2 (38) 12
10
8
0 100 200 300 400 500 600 700
t
Para exemplificar a aplicação desses modelos,
considerou-se uma série real correspondente ao Figura 1. Evolução de preço diário de ações da Vale do Rio Doce.
preço de ações da Siderúrgica Vale do Rio Doce, em
dólares, negociadas no período de 02 de janeiro de Com o objetivo de compararmos a evolução de
1996 a 1 de fevereiro de 1999, pela Bovespa (Bolsa preços reais com os preços previstos, calculou-se a
de Valores de São Paulo). previsão desses preços para os últimos 30 dias do
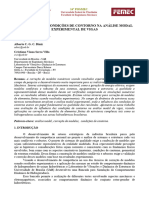
A partir das condicionais a posteriori dos parâmetros período e apresentamos os resultados obtidos nas
de cada modelo, aplicando os algoritmos Gibbs- Figuras 2 e 3.
Sampling e Metropolis-Hasting, geraram-se Na Figura 2, é visualizado o comportamento dos
amostras da série considerando 5 cadeias com 3000 valores previstos considerando um passo (dia) à
iterações cada uma, e, para garantir a independência
entre os valores simulados de cada parâmetro,
frente, ou seja, (y t+k | y ( t + k −1) ; k = 1,...,30 , )
enquanto que na Figura 3 visualiza-se tendência da
tomamos 50% das iterações, demos um salto a cada 5
previsão e dos valores reais para os 30 dias,
valores, selecionando, assim, uma amostra com 300
considerando os dados observados até o instante t,
( ),
valores em cada cadeia, totalizando uma amostra
(t )
final de 1500 valores. isto é, y t + k | y em que os 30 últimos dias
A convergência das amostras geradas foi foram deixados fora do conjunto de observações
monitorada, utilizando o método proposto por usadas no ajuste do modelo.
Gelman e Rubin (1992), o qual se baseia na análise Observando as Figuras 2 e 3, pode-se constatar
de variância. que os valores previstos, obtidos a partir da amostra
Utilizando essa amostra, aproximou-se a gerada, possuem, basicamente, a mesma tendência
densidade preditiva dos parâmetros de interesse de que os valores reais; houve apenas uma diferença de
cada modelo, através dos estimadores de Monte locação nos valores previstos, que pode ser vista na
Carlo e verificou-se graficamente qual o modelo que Figura 2.
melhor representa os dados, em função dos valores No cálculo dos valores previstos, considerando
previstos obtidos. um passo (dia) à frente, obteve-se um erro médio de
Na Tabela 1, pode-se observar os previsão (em percentual) et = 0,461% .
hiperparâmetros do modelo hierárquico
Erro esse inferior a 5%; assim, podemos concluir
considerando a variância conhecida, baseados em
que o modelo apresentado é adequado para fazer
Acta Scientiarum Maringá, v. 24, n. 6, p. 1745-1753, 2002
1752 Mena e Andrade Filho
previsões de observações futuras de dados (y | y ( t + k −1) ; k = 1, 2,..., 10 , onde os últimos 10
t+k )
financeiros. dias foram deixados fora do conjunto de observações
11 usadas no ajuste do modelo dinâmico.
10.5
y - valores em dolares
11
10
10.5
y - valores em dolares
9.5
10
9
9.5
8.5
V .Real 9
V .P revisto
8
620 625 630 635 640 645 650 655
t 8.5
V .Real
V .P revisto
Figura 2. Comparação diária de preços reais e previstos de ações 8
620 625 630 635 640 645 650 655
da Vale do Rio Doce t
Figura 4. Comparação de preços reais e previstos nos últimos 30
11
dias do período
1 0 .5
y - va lo re s e m d o la re s
28
10
27
9 .5
y - valores em dolares
26
9
25
8 .5 V .R e a l
V .P re vis to
24
8
620 625 630 635 640 645 650 655
t 23
Figura 3. Tendência de preços de ações da Vale do Rio Doce em 22 V.Real
V.Previsto
30 dias consecutivos
21
100 105 110 115 120 125 130 135
t
Considerando o modelo hierárquico com a
variância desconhecida, visualiza-se, na Figura 4, a Figura 5. Tendência de preço real e preços estimados
evolução de preços reais e de preços previstos um
(
passo (dia) à frente y t + k | y ( t + k −1) ; k = 1,..., 30 , ) 14
V a lo re s R e a is e P re vis to s d e A ç õ e s p a ra 1 0 D ia s
V .R e a l
enquanto que na Figura 5 visualiza-se a tendência 13
V .P re vis to
dos preços das ações da Siderúrgica Vale do Rio
va lo re s e m d o la re s
Doce, negociadas nos últimos 30 dias do período 12
analisado, sendo que os valores de y t + k são 11
calculados considerando todos os dados anteriores, 10
ou seja, y t + k | y ( t ) , observando que nas duas 9
figuras, os últimos 30 dias foram deixados fora dos
8
dados usados para o ajuste do modelo. 642 644 646
t
648 650 652
Na Figura 5, é possível observar que, pelo fato de
Figura 6. Comparação de preços real e preço estimados de ações
se acrescentar uma incerteza na variância, ocorre
da Vale do Rio Doce
uma discrepância nos valores previstos a partir da
amostra gerada em relação aos valores reais dos Na Figura 6, é possível observar que os valores
dados. Fato este que pode ser confirmado pelo erro previstos estão bem próximos dos valores reais com
de previsão pois, nesse caso, tem-se um erro médio pequeno erro de previsão, cujo valor médio
de et = 0,375% . percentual é:
Na Figura 6, são comparados os preços reais e et = 5,23% .
previstos, considerando um passo (dia) à frente,
Acta Scientiarum Maringá, v. 24, n. 6, p. 1745-1753, 2002
Séries temporais para modelos 1753
Mediante os resultados obtidos nesse exemplo, BROEMILING, D.L.; COOK, P. Bayesian estimation of
vale ressaltarmos que a dependência das variáveis the mean of an autoregressive process. Journal of Applied
(coeficiente) do modelo auto-regressivo não Statistics, Oklahoma, v.20, n1, p.25-38, 1993.
apresenta mudanças muito acentuadas na previsão CASELLA, G.; GEORGE, E. J. Explaining the Gibbs-
das observações futuras, mesmo quando Sampler, Belmont. Amer. Statis. Soc., Alexandria, v. 46, n.3,
p.167-174, 1992.
acrescentamos uma incerteza na variância do ruído.
O uso de modelos hierárquico e dinâmico para CHIB, S.; GRENBERG, E.J. Understanding the
Metropolis-Hasting Algorithm. Amer. Statis. Soc.,
modelagem de processos auto-regressivos com
Alexandria, v. 49, n.4, p.35-51, 1995.
parâmetros aleatórios são alternativas eficientes para
DIAZ, J. Bayesian Forecasting for AR(1) Models With
analisarmos e fazermos previsões futuras da
Normal Coefficients. Commu. Statist.-Theory Meth.,
evolução de valores econômicos. Voorburg, v.196, p.2229-2246, 1990.
Nesse caso, a análise bayesiana, usando método GELMAN, A.; RUBIN, B.D. Inference from Iterative
de simulação de Monte Carlo via Cadeia de Markov, Simulation Using Multiple Sequences. Stat. Sci.,
tem implementação razoavelmente fácil, não Hayward, v.4, p.457-511, 1992.
exigindo desenvolvimento de aproximações KALMAN, R.E. A New Approach to Linear Filtring and
numéricas, e as inferências obtidas são bastante Predition Problem. Journal of Basic Eng, Trans. ASME,
precisas. Entretanto, conforme resultados gráficos Series. D, New York, v. 82, p 35-45, 1960.
obtidos, pode-se observar que o modelo hierárquico, LIU, S.I. Comparison of Forecastes for Arma Models
no qual é considerado a variância do ruído τ 2 ( ) Between a Random Coeficent Approach and a Bayesian
Approach. Commu. Statist Theory Meth., Voorburg, v. 24,
conhecida, apresenta os valores previstos mais n.2, p.319-333, 1995.
próximos dos valores reais no período considerado.
MEINHOLD, R.J.; SINGPURVALLA, N.D.
A abordagem bayesiana é estendida para os modelos Understanding the Kalman Filter, Amer. Statis. Soc.,
mais realistas, nos quais têm-se incertezas sobre as Alexandria, v. 37, n, p.229-246, 1983.
variâncias dos ruídos. SOYER, R. Random coefficient autoregressive process and their
Nesses modelos mais gerais, os erros de previsão ramifications: applications to reliability growth. assessment. 1985.
crescem como era de se esperar; mesmo assim, os (Dissertation) - School Eng. Appl. Sci., George
modelos mostram-se mais adequados para a previsão Washington Univ, Washington D.C., 1985.
de séries não estacionárias. WEST, M.; HARRISON, J. Bayesian Forecasting and
Dynamic Models, 2. ed. New York: Springer. 1997.
Referências Received on January 26, 2002.
BOX, G.E.P. et al. Time series analysis: forecasting and control. Accepted on June 18, 2002.
3. ed. New Jersey: Holden Day, 1994.
Acta Scientiarum Maringá, v. 24, n. 6, p. 1745-1753, 2002
Você também pode gostar
- MAC en PTDocumento8 páginasMAC en PTrompnadegasAinda não há avaliações
- Portugues - Varying Coefficient Models in Stata - v4Documento40 páginasPortugues - Varying Coefficient Models in Stata - v4Arq. AcadêmicoAinda não há avaliações
- Artigo 9132 SBAI2023 Santos Ricco Teixeira FINALDocumento6 páginasArtigo 9132 SBAI2023 Santos Ricco Teixeira FINALHenriqueS LuísAinda não há avaliações
- Modelos Lineares Mistos Aplicados em Ciências Atuariais.Documento4 páginasModelos Lineares Mistos Aplicados em Ciências Atuariais.Antonio Fernando NavarroAinda não há avaliações
- ArtigosDocumento10 páginasArtigoscleverson.nevesAinda não há avaliações
- CN - Lista de Exercicios - AB1 - 2015.2Documento2 páginasCN - Lista de Exercicios - AB1 - 2015.2Max MillerAinda não há avaliações
- 144-Texto Do Artigo-287-288-10-20140802Documento6 páginas144-Texto Do Artigo-287-288-10-20140802livrosAinda não há avaliações
- Sobre o Desempenho de Reguladores Lineares Quadráticos Robustos RecursivosDocumento7 páginasSobre o Desempenho de Reguladores Lineares Quadráticos Robustos Recursivosaxel figueroaAinda não há avaliações
- PAA Trabalho FinalDocumento6 páginasPAA Trabalho FinalAlice CabralAinda não há avaliações
- Gustavo RelatorioDocumento19 páginasGustavo RelatorioEverton15Ainda não há avaliações
- Técnicas de Previsão de Box Jenkins PDFDocumento52 páginasTécnicas de Previsão de Box Jenkins PDFEduardo D'CastroAinda não há avaliações
- AULA - Séries Temporais Modelos de Suavização ExponencialDocumento9 páginasAULA - Séries Temporais Modelos de Suavização ExponencialWashington MouraAinda não há avaliações
- Identificacao de Modelo ARX e Controle PI-D de UmDocumento8 páginasIdentificacao de Modelo ARX e Controle PI-D de UmCelso MoreiraAinda não há avaliações
- Galoa Proceedings Pibic 2016 51241Documento1 páginaGaloa Proceedings Pibic 2016 51241paulacristina.conteudistaAinda não há avaliações
- Modelos Lineares Generalizados - Apostila Gauss CordeiroDocumento165 páginasModelos Lineares Generalizados - Apostila Gauss CordeiroRodrigo FerreiraAinda não há avaliações
- Artigo 65062bc9 ArquivoDocumento13 páginasArtigo 65062bc9 ArquivoBruce ChombeAinda não há avaliações
- NAGHETTINI. Otimização Do Método de Muskingum Não Linear Utilizando Algoritmo GenéticoDocumento14 páginasNAGHETTINI. Otimização Do Método de Muskingum Não Linear Utilizando Algoritmo GenéticoLuidy DamacenoAinda não há avaliações
- Resumo P1 GLMDocumento9 páginasResumo P1 GLMGian LimaAinda não há avaliações
- Auto RegressaoDocumento1 páginaAuto RegressaoBsalesAinda não há avaliações
- Bootstrap PDFDocumento12 páginasBootstrap PDFVinicius Maatriyk de OliveiraAinda não há avaliações
- Relatório FinalDocumento21 páginasRelatório FinalAndré Boscariol RaseraAinda não há avaliações
- Capitulo 2 - Metodologia de Afonso AbrahamDocumento3 páginasCapitulo 2 - Metodologia de Afonso AbrahamAntonio De Sousa ToipyAinda não há avaliações
- PM16 0099Documento10 páginasPM16 0099robsonaraujoabreuAinda não há avaliações
- Lista5 SistemasLinearesDocumento5 páginasLista5 SistemasLinearesMarco SteffenAinda não há avaliações
- BASE FEI P2 - Teoria METROLOGIA MEF110Documento5 páginasBASE FEI P2 - Teoria METROLOGIA MEF110Gabriel FreitasAinda não há avaliações
- 1204-Article Text-3685-1-10-20201216Documento8 páginas1204-Article Text-3685-1-10-20201216ojrnewAinda não há avaliações
- W1 - Laboratorio PDFDocumento14 páginasW1 - Laboratorio PDFArao FumoAinda não há avaliações
- Relatório JOEL - BackpropagationDocumento21 páginasRelatório JOEL - BackpropagationDev BranvierAinda não há avaliações
- Fundamentos de Estatística, Incerteza de Medidas e Sua Propagação PDFDocumento12 páginasFundamentos de Estatística, Incerteza de Medidas e Sua Propagação PDFWesley LuísAinda não há avaliações
- Técnicas de Previsão Box-Jenkins No EXCELDocumento52 páginasTécnicas de Previsão Box-Jenkins No EXCELEduMendesAinda não há avaliações
- Mod Sim 1Documento14 páginasMod Sim 1Isaac HawkinsAinda não há avaliações
- Projeto - Jean Hermes Carvalho VascoDocumento8 páginasProjeto - Jean Hermes Carvalho VascoJean VascoAinda não há avaliações
- Como Usar o MS Excel para Ralizar A Simulao Monte CarloDocumento6 páginasComo Usar o MS Excel para Ralizar A Simulao Monte CarloVinicius Alex Genaro100% (1)
- Estatística Aplicacada - AtividadesFormativasDocumento32 páginasEstatística Aplicacada - AtividadesFormativasMª de Jesus BezerraAinda não há avaliações
- Resolvendo Equação de Schrodinger Com Procedimento NuméricoDocumento7 páginasResolvendo Equação de Schrodinger Com Procedimento NuméricoAlexandre CostaAinda não há avaliações
- Resumo Sobre Análise Estatística de Dados - IVDocumento15 páginasResumo Sobre Análise Estatística de Dados - IVRobson Timoteo DamascenoAinda não há avaliações
- CE227 - Cronograma Das Aulas Do CursoDocumento3 páginasCE227 - Cronograma Das Aulas Do CursoJuliano S. IgnacioAinda não há avaliações
- CN Sistemas Parte2Documento41 páginasCN Sistemas Parte2priscila keziaAinda não há avaliações
- Introdução Ao Ajustamento de Observações - 2005Documento63 páginasIntrodução Ao Ajustamento de Observações - 2005Marcos Vinicius100% (1)
- Modelos Multivariados HeterocedásticosDocumento16 páginasModelos Multivariados HeterocedásticosRafaelAinda não há avaliações
- Apresentaçao Inversao - Metodo de Monte CarloDocumento15 páginasApresentaçao Inversao - Metodo de Monte CarloleonardoAinda não há avaliações
- Macs 11Documento3 páginasMacs 11Giovanna DoliveiraAinda não há avaliações
- Universidade Zambeze Faculdade de Ciências Sociais E HumanidadesDocumento10 páginasUniversidade Zambeze Faculdade de Ciências Sociais E HumanidadesZALINOAinda não há avaliações
- 2015-Diss-Métodos de Monte Carlo Hamiltoniano Na Inferência Bayesiana Não-Paramétrica de Valores Extremos - (MarceloHartmann)Documento95 páginas2015-Diss-Métodos de Monte Carlo Hamiltoniano Na Inferência Bayesiana Não-Paramétrica de Valores Extremos - (MarceloHartmann)sssAinda não há avaliações
- Cadeias de MarkovDocumento7 páginasCadeias de MarkovJULIANA DA SILVA NOGUEIRA CARVALHOAinda não há avaliações
- Modelos Não Lineares Recorrentes Com Capacidade de ExtrapolaçãoDocumento55 páginasModelos Não Lineares Recorrentes Com Capacidade de ExtrapolaçãoRegis QueirozAinda não há avaliações
- Métodos Numéricos - Resolução de Sistemas - ExercíciosDocumento28 páginasMétodos Numéricos - Resolução de Sistemas - ExercíciosAlexandre MarcondesAinda não há avaliações
- Trabalho Métodos Numéricos - Jalles Gabriel Cardoso SilvaDocumento6 páginasTrabalho Métodos Numéricos - Jalles Gabriel Cardoso SilvaLucas RodriguesAinda não há avaliações
- Material1 Ajustamentodeobservacoes PDFDocumento48 páginasMaterial1 Ajustamentodeobservacoes PDFHenrique Gomes Frade JuniorAinda não há avaliações
- Capítulo 3 - Modelo de Regressão de Duas Variáveis - o Problema Da EstimaçãoDocumento49 páginasCapítulo 3 - Modelo de Regressão de Duas Variáveis - o Problema Da EstimaçãoEmerson CabralAinda não há avaliações
- Aula 6Documento26 páginasAula 6Fernando BatistaAinda não há avaliações
- IasminDocumento135 páginasIasminPabloAinda não há avaliações
- Aula 1 - ANAL - sist.LINEARES - Apresentação - Conceitos IniciaisDocumento28 páginasAula 1 - ANAL - sist.LINEARES - Apresentação - Conceitos IniciaisMikael PaivaAinda não há avaliações
- FCM Com Testes de Icc e CsDocumento14 páginasFCM Com Testes de Icc e CsrobertasaAinda não há avaliações
- ArtigoDocumento9 páginasArtigoYasmim LimaAinda não há avaliações
- Galoa Proceedings Sbai 2019 108395Documento6 páginasGaloa Proceedings Sbai 2019 108395Jadson SouzaAinda não há avaliações
- TRABALHO de EC - Modelo SARIMADocumento10 páginasTRABALHO de EC - Modelo SARIMAJunior MxAinda não há avaliações
- Artigo-Cesp V04Documento7 páginasArtigo-Cesp V04krlnmAinda não há avaliações
- Controle Inferencial PDFDocumento9 páginasControle Inferencial PDFandersonld50Ainda não há avaliações
- UntitledDocumento13 páginasUntitledkrystinaAinda não há avaliações
- ExerciciosDocumento15 páginasExerciciosJunior MxAinda não há avaliações
- Recuperação EstatísticaDocumento27 páginasRecuperação EstatísticaRafael Santana RodirguesAinda não há avaliações
- Estimacao IntervalarDocumento2 páginasEstimacao IntervalarAfonso MourãoAinda não há avaliações
- Uso Da Tabela NormalDocumento40 páginasUso Da Tabela NormalTarso StroiekAinda não há avaliações
- Aula 4 - Inferenãncias Sobre VariãnciasDocumento29 páginasAula 4 - Inferenãncias Sobre Variãnciasnoam orcoAinda não há avaliações
- ESTATÍSTICA E PROBABILIDADE - Aula 8Documento26 páginasESTATÍSTICA E PROBABILIDADE - Aula 8Gustavo HorikochiAinda não há avaliações
- Est Lista6Documento5 páginasEst Lista6Angelo PrimoAinda não há avaliações
- Aproximação Binomial NormalDocumento10 páginasAproximação Binomial NormalRodrigo AntonioAinda não há avaliações
- Lista Variaveis Aleatórias Continuas e DiscretasDocumento4 páginasLista Variaveis Aleatórias Continuas e DiscretasLuiz Otavio Daros NunesAinda não há avaliações
- Aula de ExercíciosDocumento2 páginasAula de ExercíciosGabriel DiasAinda não há avaliações
- Aula 6 - Estimador de Máxima Verossimilhança (Capítulo 5, Hansen 2019 2020)Documento38 páginasAula 6 - Estimador de Máxima Verossimilhança (Capítulo 5, Hansen 2019 2020)JEAN DOS SANTOSAinda não há avaliações
- 3 DistribuicoesContinuasDocumento42 páginas3 DistribuicoesContinuaswendddersonAinda não há avaliações
- Variaveis Aleatorias e Exercicios - BCCDocumento3 páginasVariaveis Aleatorias e Exercicios - BCColivier sossaAinda não há avaliações
- Distribuição Qui-QuadradoDocumento18 páginasDistribuição Qui-QuadradoDaniel MedeirosAinda não há avaliações
- Estatistica - Notas de Aula - II Unidade - Modelos ProbabilãDocumento29 páginasEstatistica - Notas de Aula - II Unidade - Modelos ProbabilãRobert GustavoAinda não há avaliações
- Estatísticapara Escrivãoe Agenteda Polícia Federal Pósedital Aula 8Documento83 páginasEstatísticapara Escrivãoe Agenteda Polícia Federal Pósedital Aula 8Kelvia RochaAinda não há avaliações
- Modelos Probabilísticos Contínuos - Uniforme e ExponencialDocumento18 páginasModelos Probabilísticos Contínuos - Uniforme e ExponencialRuben StineAinda não há avaliações
- 2020 09 08 Resolucao ExameEpocaEspecial 09hDocumento8 páginas2020 09 08 Resolucao ExameEpocaEspecial 09hMartim Nunes Silva BaltazarAinda não há avaliações
- Cap3. Distribuiçoes de Variaveis AleatoriasDocumento14 páginasCap3. Distribuiçoes de Variaveis Aleatoriasmessias sorteAinda não há avaliações
- Aula 10Documento3 páginasAula 10liviamedalha13Ainda não há avaliações
- Estatistica-Decodificada SumDocumento5 páginasEstatistica-Decodificada SumNicholas MachadoAinda não há avaliações
- Caderno Exercicios Modelos Conti NuosDocumento14 páginasCaderno Exercicios Modelos Conti NuosSergio GonçalvesAinda não há avaliações
- Distribuicao de Aulas 2o Sem 2022Documento2 páginasDistribuicao de Aulas 2o Sem 2022Gustavo Bertozzi MottaAinda não há avaliações
- 06 Leis DiscretasDocumento12 páginas06 Leis DiscretasInes BarrosAinda não há avaliações
- Folha Pratica 5 Estatistica I ISCAM 2021A Variaveis AleatoriasDocumento4 páginasFolha Pratica 5 Estatistica I ISCAM 2021A Variaveis AleatoriasMusselo RagyAinda não há avaliações
- 406 Modelos Continuos AdicionaisDocumento45 páginas406 Modelos Continuos AdicionaisMatheus.0409Ainda não há avaliações
- Aula 2 - Exercícios PráticosDocumento7 páginasAula 2 - Exercícios PráticosFelipeAinda não há avaliações
- Slides1 Aula1 TPDocumento7 páginasSlides1 Aula1 TPGonçalo PereiraAinda não há avaliações
- Distribuição HipergeometricaDocumento25 páginasDistribuição HipergeometricaJoão LuzAinda não há avaliações