Você também pode gostar
- Apostila Secretariado PDFDocumento49 páginasApostila Secretariado PDFadg22086379100% (2)
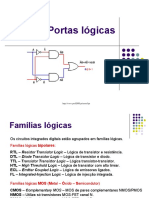
- Portas LogicasDocumento15 páginasPortas LogicasLuis FornazieroAinda não há avaliações
- Noçoes de BiossegurançaDocumento39 páginasNoçoes de BiossegurançaEng Marcel Miguel AyoubAinda não há avaliações
- 3 Avaliação Formativa: CadernoDocumento5 páginas3 Avaliação Formativa: CadernoJamyson BatistaAinda não há avaliações
- Planeamento e Controlo OrcamentalDocumento19 páginasPlaneamento e Controlo OrcamentalFernando Ribeiro JúniorAinda não há avaliações
- Trabalho de FilosofiaDocumento4 páginasTrabalho de Filosofiaevandra FreitasAinda não há avaliações
- Documento 360 WebDocumento85 páginasDocumento 360 WebTassila AraújoAinda não há avaliações
- Marco Rossi - Currículo Artístico Resumido IlustradoDocumento10 páginasMarco Rossi - Currículo Artístico Resumido IlustradoPaulo SilvaAinda não há avaliações
- Sistemas Producao Automacao Trabalho Manual e Estrategia AutomacaoDocumento55 páginasSistemas Producao Automacao Trabalho Manual e Estrategia AutomacaoCaroline FreireAinda não há avaliações
- MERCADODocumento49 páginasMERCADORaphael Dannemann PiresAinda não há avaliações
- Corrosao Inter Granular em Juntas Soldadas - PARTE IIDocumento12 páginasCorrosao Inter Granular em Juntas Soldadas - PARTE IILúcio BarbozaAinda não há avaliações
- TCC - Estado PunitivoDocumento9 páginasTCC - Estado PunitivoIsabella MouraAinda não há avaliações
- Age - 419540 - ARQ - DISPONIBILIZADO - DOCUMENTACAO - Programação Oficial XX Encontro de Graduação e IX Encontro de Pós-GraduaçãoDocumento10 páginasAge - 419540 - ARQ - DISPONIBILIZADO - DOCUMENTACAO - Programação Oficial XX Encontro de Graduação e IX Encontro de Pós-GraduaçãoBruno QueirozAinda não há avaliações
- Manual - Alarme SpyderDocumento10 páginasManual - Alarme SpyderRenato SantoliniAinda não há avaliações
- Vainfas-Patriarcalismo e MisoginiaDocumento3 páginasVainfas-Patriarcalismo e MisoginiaCaroline PitangaAinda não há avaliações
- Valvula - BL - 22Documento1 páginaValvula - BL - 22Eric MateusAinda não há avaliações
- Ficha4 - Fquadrática - 9ADocumento4 páginasFicha4 - Fquadrática - 9AHelena MonteiroAinda não há avaliações
- Acidente Saudia Voo 163Documento13 páginasAcidente Saudia Voo 163DárioGoulartAinda não há avaliações
- Biologia Celular - Citoplasma CelularDocumento10 páginasBiologia Celular - Citoplasma CelularHálysson Nogueira ShalomAinda não há avaliações
- Memo Prevperdas 43.21 - Recolhimento Cds e Lojas - Nov21Documento2 páginasMemo Prevperdas 43.21 - Recolhimento Cds e Lojas - Nov21Jonatan CostaAinda não há avaliações
- Exercicio Sismologia - Respostas - Revisão 1Documento7 páginasExercicio Sismologia - Respostas - Revisão 1Victor HegasAinda não há avaliações
- File 000550Documento11 páginasFile 000550Lucas FerreiraAinda não há avaliações
- Introdução Suplemento AlimentarDocumento8 páginasIntrodução Suplemento AlimentarAlfred Andersen0% (1)
- Regosolos ApresentacaoDocumento9 páginasRegosolos ApresentacaoCélio MonteiroAinda não há avaliações
- Como Utilizar Algumas Ferramentas Do CD Hírens Boot 10Documento4 páginasComo Utilizar Algumas Ferramentas Do CD Hírens Boot 10paulo de a sAinda não há avaliações
- O Futuro de Uma IlusãoDocumento8 páginasO Futuro de Uma IlusãoArthur SampaioAinda não há avaliações
- Plano FlexDocumento8 páginasPlano FlexMacadoshis CruzAinda não há avaliações
- TCC - Rosikelhe BarrosDocumento12 páginasTCC - Rosikelhe BarrosRosikelhe AzeredoAinda não há avaliações
- Direitos HumanosDocumento2 páginasDireitos HumanosFabrícia MacielAinda não há avaliações
- Bastante 2019Documento2 páginasBastante 2019Oliver Fausti OliverAinda não há avaliações