Escolar Documentos
Profissional Documentos
Cultura Documentos
RoboticaIndustrial2000 2001 Cap4
Enviado por
papagaiuTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
RoboticaIndustrial2000 2001 Cap4
Enviado por
papagaiuDireitos autorais:
Formatos disponíveis
Robtica Industrial
Captulo 4 - Cinemtica Directa de Manipuladores
Vtor M. F. Santos
z
1
z
2
x
0
y
1
y
2
x
2
y
0
2
L
2
z
0
1
x
1
L
1
Elo
l d
1
1
+/2
0 L
1
2
2
0 L
2
0
1 1 1 2 1 2 1 2 1 2 2 2 2
1 1 1 2 1 2 1 2 1 2 2 2 2 2
0
2
1 2 2
0 0 0
0 0 0
0 0 1 0 0 1 0 0
0 0 0 1 0 0 0 1 0 0 0 1
R
H
C S C C C S S L C C C S L C
S C S C S S C L S C S C L S
L S C
l
2
2 2 1
L S L
l l
l l
l l
l l
= = =
l l
+
l l
l l
l l
l
l
l
l
l
l
l
l l l
l l
T T
l
Departamento de Engenharia Mecnica
Universidade de Aveiro, Outubro de 2001
Contedo
4. CINEMTICA DIRECTA DE MANIPULADORES ............................................................................... 4-1
4.1 CINEMTICA DE UM MANIPULADOR .................................................................................................. 4-1
4.1.1 Definio......................................................................................................................................... 4-1
4.1.2 Espao das juntas e espao cartesiano........................................................................................... 4-1
4.1.3 O algoritmo da Cinemtica Directa ............................................................................................... 4-2
4.2 PARMETROS DE JUNTAS E ELOS........................................................................................................ 4-2
4.2.1 Eixo de uma junta ........................................................................................................................... 4-2
4.2.2 Os quatro parmetros de elos e juntas ........................................................................................... 4-3
4.2.3 Alguns exemplos de elos.................................................................................................................. 4-4
4.2.4 Os parmetros cinemticos variveis ............................................................................................. 4-7
4.2.5 Transformao
i-1
A
i
associada a um elo ......................................................................................... 4-8
4.3 ATRIBUIO DE SISTEMAS DE COORDENADAS................................................................................. 4-9
4.3.1 Exemplos simples de sistemas de coordenadas............................................................................... 4-9
4.3.2 Algoritmo de Denavit-Hartenberg ................................................................................................ 4-12
4.3.3 Representao de Denavit-Hartenberg para um PUMA de 6 DOF............................................. 4-12
4.4 EXEMPLOS DE CONSTRUO DA CINEMTICA DIRECTA .............................................................. 4-13
4.4.1 Um manipulador a 5 DOF (Microbot Alpha II) ........................................................................... 4-13
4.4.2 Um manipulador do tipo SCARA (4 DOF) ................................................................................... 4-15
4.5 NGULOS FINAIS DE ORIENTAO EM FUNO DAS VARIVEIS DE JUNTA............................... 4-17
4.5.1 Comparao da matriz RPY(,,) coma parte rotacional da matriz
R
T
H
................................... 4-17
4.5.2 Limitaes de preciso e reformulao ........................................................................................ 4-18
4.5.3 Exemplo de aplicao a um manipulador com 2 DOF em 3 dimenses....................................... 4-20
i
Robtica Industrial, 2001-2002, V. Santos
Cinemtica Directa de Manipuladores Pgina 4-1
4. Cinemtica Directa de Manipuladores
4.1 Cinemtica de um manipulador
4.1.1 Definio
A cinemtica de um manipulador o estudo do conjunto de relaes entre as posies, velocidades
e aceleraes dos seus elos.
O estudo que aqui se inicia diz respeito apenas aos manipuladores srie, que alis a categoria
que inclui a grande maioria de manipuladores industriais e didcticos. Os manipuladores srie
caracterizam-se pelo facto de todas as juntas ligarem dois e apenas dois elos consecutivos.
A relao entre o referencial de origem e o referencial da extremidade (mo) do manipulador dada
por uma transformao
R
TH que, todavia, no d qualquer indicao sobre as relaes entre os elos
intermdios. Desse modo, para fazer um estudo da cinemtica, e outros, necessrio, antes de mais,
definir sistemas de coordenadas associados a cada elo, ou seja, atribuir-lhe referenciais. Por outro lado, a
relao geomtrica entre elos traduzvel por uma matriz de transformao: para ir de um extremo de
um elo (junta ou base do robot) at ao outro extremo do elo (a junta seguinte ou a extremidade do robot)
far-se-o translaes e rotaes. Em suma, um dado elo i ter associado a si a matriz de transformao
Ai, onde a primeira matriz, A1, relaciona o primeiro elo com a base fixa, e a ltima matriz, An, relaciona o
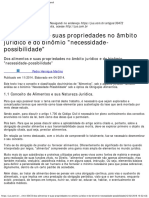
referencial da mo com o ltimo elo. ento claro que
R
TH = A1A2...An. A Figura 4.1 esquematiza as
transformaes associados a um manipulador de 3 elos.
H
A
1
A
2
A
3
J
1
H
R
T
H
A
1
R
A
2
A
3
J
2
R
TH = A1A2A3
R
Figura 4.1 - Matriz de transformao de um manipulador srie com 3 elos
4.1.2 Espao das juntas e espao cartesiano
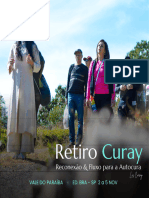
O estudo da cinemtica divide-se em dois tipos de problemticas: localizao da mo a partir das
posies das juntas (cinemtica directa), e determinao das posies das juntas a partir da posio da
mo (cinemtica inversa).
Podemos assim definir dois espaos de variveis: o espao das variveis da juntas, ou
simplesmente espao das juntas, e o espao cartesiano ou operacional. A dimenso do espao
operacional 6 (3 translaes e 3 orientaes) e o espao das juntas tem como dimenso o nmero de
Robtica Industrial, 2001-2002, V. Santos
juntas do manipulador. As operaes do espao das juntas para o espao cartesiano no apresentam
qualquer ambiguidade, mas o contrrio pode no ser verdade. De facto, o espao das juntas muitas
vezes redundante, isto , nem sempre possvel estabelecer uma relao unvoca com o espao
cartesiano, significando que vrias configuraes no espao das juntas resultam na mesma configurao
no espao operacional
Cinemtica
inversa
Cinemtica
directa
Espao das
juntas
Espao
cartesiano
Espao das juntas
Espao operacional
Figura 4.2 - Cinemtica directa e inversa, e natureza no biunvoca da sua inter-relao
4.1.3 O algoritmo da Cinemtica Directa
Implementar a cinemtica directa de um manipulador significa, portanto, determinar as relaes
que exprimem um ponto no espao cartesiano, r
, em funo de um ponto no espao das juntas, q
, isto
( )
directa
= r F q .
Os passos ou algoritmo para definir tal relao so, essencialmente, os seguintes:
Colocar o robot na posio zero (descrito adiante)
Atribuir um sistema de coordenadas a cada elo
Descrever as relaes (translaes e rotaes) entre as variveis das juntas e dos elos
Determinar as matrizes de transformao Ai dos diversos elos.
Multiplicar os Ai e obter a expresso
R
TH
Obter as coordenadas de posio da mo
Obter as coordenadas de orientao da mo
4.2 Parmetros de juntas e elos
Para atribuir sistemas de coordenadas a um elo ser preciso levar em conta a sua prpria
geometria e as consequncias que ter no elo seguinte da cadeia. No intuito de obter uma forma coerente
e prtica de determinao desses sistemas de coordenadas, necessrio definir conceitos tais como o
eixo de uma junta ou os parmetros cinemticos dos elos e juntas associadas.
4.2.1 Eixo de uma junta
O eixo de uma junta o eixo relacionado com a simetria do movimento inerente prpria junta e
que pode coincidir com o eixo de um ou outro elo ou mesmo ser-lhe ortogonal; de seguida descrevem-se
as situaes tipo. O eixo de uma junta far parte do sistema de coordenadas associados ao elo, e
convenciona-se que seja o eixo das coordenadas zz.
Eixo de junta rotacional
No caso de termos dois elos colineares, ento o eixo da junta coincide com o eixo longitudinal dos
elos, como se ilustra na Figura 4.3 do lado esquerdo. Este tipo de arranjo de junta colinear rotacional
muito usado em punhos de manipuladores. No caso dos elos terem o eixo de rotao perpendicular ao
seu eixo longitudinal (Figura 4.3, lado direito), estamos em presena de um arranjo muito comum para
Cinemtica Directa de Manipuladores Pgina 4-2
Robtica Industrial, 2001-2002, V. Santos
cotovelos, ou seja o eixo da junta ortogonal.
Figura 4.3 - Eixo de junta colinear e ortogonal em juntas rotacionais
Eixo de uma junta prismtica
Para juntas prismticas a abordagem semelhante. Existem os casos de junta colinear ou junta
ortogonal, conforme se ilustra na Figura 4.4, do lado esquerdo e direito, respectivamente.
Figura 4.4 - Eixo de junta colinear e ortogonal em juntas prismticas
4.2.2 Os quatro parmetros de elos e juntas
Um elo um elemento rgido que mantm fixas as relaes entre juntas sucessivas e pode ser
caracterizado com um determinado nmero de parmetros geomtricos/cinemticos no que diz respeito
transformao geomtrica que opera. Os elos intermdios so delimitados por duas juntas; que o
precede na srie de ligaes designa-se aqui por junta anterior, e outra designa-se posterior ou
seguinte. Excepes devem ser levadas em conta para os elos extremos do manipulador, onde s h uma
junta delimitadora. Apresenta-se de seguida uma definio conceptual de cada um dos quatro
parmetros cinemticos, qual se junta uma definio formal que ser usada mais adiante, a propsito
do Algoritmo de Denavit-Hartenberg. Para se compreender a definio formal recorre-se a uma a
simbologia prpria, a saber:
Oi Ponto de origem do sistema de coordenadas i.
zi xi Ponto de interseco entre o eixo zi e o eixo xi
,
i
i i
x
O P Distncia do ponto Oi ao ponto Pi medido ao longo do eixo xi
( )
,
,
i
y
i
x z ngulo medido da direco de xi para a direco de zi em torno do eixo yi
Comprimento do elo (li)
Distncia medida ao longo da normal comum entre os eixos das juntas. Traduz o conceito de
afastamento linear entre os eixos das juntas. Formalmente
1
: ( )
1
,
i
i i i i x
z x
= l O .
1
Alguns autores preferem usar a letra a para designar este parmetro.
Cinemtica Directa de Manipuladores Pgina 4-3
Robtica Industrial, 2001-2002, V. Santos
Distncia entre elos ou deslocamento de juntas (di)
O deslocamento de juntas traduz, em geral, a distncia entre elos medida ao longo do eixo da junta
anterior. Definio formal: ( )
1
1 1
,
i
i i i i z
z x
= d O
ngulo de junta (i)
ngulo definido normalmente entre o eixo de um elo e o eixo do elo seguinte. Definio formal:
( )
1
1
,
i
i i i
z
x x
=
ngulo de toro do elo (i)
ngulo de toro que o elo impe desde o eixo da junta anterior at ao eixo da junta seguinte.
Definio formal:
( )
1
,
i
i i i
x
z z
=
4.2.3 Alguns exemplos de elos
De seguida apresentam-se vrias geometrias de elos com o intuito de ilustrar os diversos
parmetros que afectam a cinemtica de um manipulador. A definio dos sistemas de coordenadas no
muito rgida excepo da definio do eixo zz que coincide com o eixo da junta, como convencionado.
O n-simo elo e a sua junta anterior (n-sima) so responsveis pela definio do sistema de coordenadas
n que se considera solidrio com o elo. O sistema de coordenadas (n-1) aquele sobre o qual opera a
junta n e o respectivo elo n. Desse modo, o sistema de coordenadas 0 (zero) o primeiro de todos e refere-
se base fixa do manipulador.
Regras adicionais sero propostas mais adiante de uma forma estruturada para a definio do
algoritmo de Denavit-Hartenberg. Em todos os casos seguintes, o elo o n-simo da cadeia.
z
n-1
y
n-1
y
n
z
n
x
n
x
n-1
n+1
Junta n
Junta n+1
l
n
ln 0
d
n
= 0
n
= varivel
n
= 0
Figura 4.5 Exemplo 1 de elo juntas rotacionais paralelas
Cinemtica Directa de Manipuladores Pgina 4-4
Robtica Industrial, 2001-2002, V. Santos
z
n-1
y
n-1
y
n
x
n-1
n+1
Junta n
Junta n+1
z
n
x
n
l
n
d
n
l
n
0
d
n
0
n
= varivel
n
= 0
Figura 4.6 Exemplo 2 de elo: juntas rotacionais paralelas com desalinhamento
z
n-1
y
n-1
z
n
x
n
x
n-1
n+1
Junta n+1
Junta n
y
n
l
n
n
l
n
0
d
n
= 0
n
= varivel
n
0 (90)
Figura 4.7 - Exemplo 3 de elo: juntas rotacionais ortogonais
z
n-1
y
n-1
z
n
x
n
x
n-1
n+1
Junta n+1
Junta n
y
n
l
n
d
n
n
l
n
0
d
n
0
n
= varivel
n
0 (90)
Figura 4.8 Exemplo 4 de elo: juntas rotacionais ortogonais e com desalinhamento
Cinemtica Directa de Manipuladores Pgina 4-5
Robtica Industrial, 2001-2002, V. Santos
z
n-1
y
n-1
z
n
y
n
x
n-1
Junta n+1
Junta n
x
n
n
d
n
n
l
n
= 0
d
n
0
n
= varivel
n
0 (+90)
Figura 4.9 - Exemplo 5 de elo: juntas rotacionais ortogonais (2 tipo)
z
n-1
y
n-1
z
n
y
n
x
n-1
Junta n+1
Junta n
x
n
n
d
n
n
l
n
= 0
d
n
0 (varivel)
n
0 (+90)
n
0 (+90)
Figura 4.10 - Exemplo 6 de elo: junta prismtica e rotacional, ortogonais
z
n-1
y
n-1
z
n
y
n
x
n-1
Junta (n+1)
Junta n
x
n
n
d
n
l
n
l
n
0
d
n
= varivel
n
= 0
n
0 (+90)
Figura 4.11 - Exemplo 7 de elo: junta prismtica e rotacional, ortogonais (2 tipo)
Cinemtica Directa de Manipuladores Pgina 4-6
Robtica Industrial, 2001-2002, V. Santos
z
n-1
y
n-1
z
n
y
n
x
n-1
Junta (n+1)
Junta n
x
n
n
d
n
l
n
Parmetros aparentes:
l
n
0
d
n
= varivel
n
= 0
n
0 (+90)
A trao mais grosso indicam-se os
reais parmetros no contemplados de
facto nos 4 parmetros cinemticos
aparentes acima indicados.
Figura 4.12 Exemplo 8 de elo. Geometria mais elaborada com juntas prismticas ortogonais
z
n-1
y
n-1
z
n
y
n
x
n-1
Junta (n+1)
Junta n
x
n
n
d
n
n
l
n
n0
= +90
l
n
Parmetros aparentes:
l
n
0
d
n
0
n
= 90 + varivel
n
0 (+90)
A trao mais grosso indicam-se os
reais parmetros no contemplados de
facto nos 4 parmetros cinemticos
aparentes acima indicados.
Figura 4.13 - Exemplo 9 de elo. Geometria mais elaborada com juntas rotacionais ortogonais
Os casos representados na Figura 4.12 e na Figura 4.13 so os mais complexos de todos os
apresentados aqui, e uma aplicao simplista das regras usadas nos casos restantes mostrar-se-ia
insuficiente porque aparentemente faltaria um termo de translao. Na verdade, uma escolha mais
criteriosa de dois parmetros permitiria obviar esse problema. Na referidas figuras ilustra-se a trao mais
grosso (e de cor diferente) essas medidas a ter de levar em conta; bastaria repensar, por exemplo, os
parmetros dn e n. Note-se que em algumas situaes, como o caso da Figura 4.12, a definio da
matriz de transformao simples (translaes e rotaes simples e bem definidas), e prescindiria de
todo este processo de o recurso aos parmetros cinemticos.
4.2.4 Os parmetros cinemticos variveis
Obviamente que os parmetros cinemticos no so sempre todos constantes, seno a
transformao geomtrica seria constante, e portanto o manipulador imvel. Dos quatro parmetros
indicados dois esto associados componente mvel (juntas); so as variveis de junta. Se uma junta for
rotacional, a varivel de junta o ngulo de junta i. Se a junta for prismtica, a varivel de junta o
deslocamento da junta, ou distncia entre elos, di.
A tabela seguinte resume os conceitos mais importantes sobre os parmetros cinemticos.
Cinemtica Directa de Manipuladores Pgina 4-7
Robtica Industrial, 2001-2002, V. Santos
Parmetro Smbolo
Junta
rotacional
Junta
prismtica
Definio formal
ngulo de junta
i
varivel fixo
( )
1
1
,
i
i i i
z
x x
=
Deslocamento de junta d
i
fixo varivel ( )
1
1 1
,
i
i i i i z
d O z x
=
Comprimento do elo l
i
(a
i
) fixo fixo ( )
1
,
i
i i i i x
l O z x
=
ngulo de toro do elo
i
fixo fixo
( )
1
,
i
i i i
x
z z
=
Tabela 4.1 - Tabela dos parmetros cinemticos
Para efeitos de uma abordagem genrica, diz-se que o vector variveis de junta designado por q e
dado pela seguinte expresso:
1 2
T
n
q q q
l
=
l
l
q
, q
i
i
i
rotacional
d prismti
'
1
1
=
!
1
1
+
ca
) ,
i
4.2.5 Transformao
i-1
Ai associada a um elo
Depois do exposto imediato concluir que o elo i, associado sua junta i, realiza uma
transformao geomtrica, dando origem ao referencial i+1, que pode ser decomposta nas quatro
operaes elementares:
Rotao i em torno do eixo da junta (zi-1)
Translao longitudinal ao longo do eixo do elo (xi) do seu prprio comprimento (li)
Translao transversal ao longo do eixo da junta (zi) do afastamento entre juntas (di)
Rotao i do eixo da junta (zi) em torno do eixo longitudinal (xi) do elo
Repare-se que estas transformaes elementares surgem concatenadas em sequncia, e por esta
ordem, se bem que as translaes possam comutar entre si, o que significa globalmente obter-se uma
transformao final por ps-multiplicao sucessiva, resultando na matriz
i-1
Ai ou mais simplesmente, Ai:
( ) ( ) ( ) ( , , 0, 0 0, 0,
i i i i
z l d x = A Rot Trans Trans Rot
1 0 0 0 1 0 0 0 0
0 1 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0
0 0 0 1 0 0 0 1 0 0 0 1
i i i
i i i i
i
i i i
l C S
C S S C
d S C
l l l
l l l
l l l
l l l
=
l l l
l l l
l l l
l l l
l l l
l l l
A
0
0 0 0 1
i i i i i i
i i i i i i
i
i i
C S C S S l C
S C C C S l S
S C
i
i
d
l
l
l
l
=
l
l
l
l
l
l
A (4.1)
Os elos de um manipulador so numerados a partir da base e o primeiro elo (mvel) o elo nmero
1 que se segue primeira junta, ou junta nmero 1. A base fixa designada o elo 0. Sistema de
coordenadas 0 (zero) ser aquele a partir do qual se faz toda a transformao geomtrica do manipulador.
H frequentemente mais do que uma possibilidade de o fazer, conforme o interesse do problema. A
Figura 4.14 ilustra duas possibilidades alternativas (a segunda a tracejado) para definir o sistema de
coordenadas inicial (zero) de um manipulador do tipo PUMA com 6 graus de liberdade: 6 juntas, 6 elos
Cinemtica Directa de Manipuladores Pgina 4-8
Robtica Industrial, 2001-2002, V. Santos
(mveis mais uma base ou elo 0). Deve referir-se que haveria ainda vrias outras possibilidades de
escolher os sistemas de eixos.
z
0
y
0
x
0
Figura 4.14 - Elos e juntas de um manipulador do tipo PUMA. Assinala-se a tracejado uma alternativa para o
sistema de referncia.
4.3 Atribuio de sistemas de coordenadas
4.3.1 Exemplos simples de sistemas de coordenadas
Apresentam-se agora dois exemplos de atribuio de sistemas de coordenadas e a determinao de
parmetros cinemticos de coordenadas em dois manipuladores simples com dois graus de liberdade
cada. Antes de mais defina-se que a posio zero de um manipulador (Zero ou Home Position) aquela em
que as variveis de junta esto nos seus valores 0. Ou seja, as juntas rotacionais esto alinhadas com a
referncia e as juntas prismticas esto recolhidas.
Um manipulador planar a 2 DOF
z
1
z
2
y
0
y
1
y
2
x
2
x
1
x
0
2
l
1
l
2
Elo l d
1
1
0 l
1
0
2
2
0 l
2
0
z
0
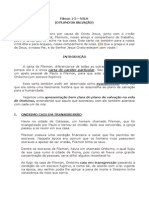
Figura 4.15 - Sistemas de coordenadas e parmetros cinemticos de um robot planar a 2 DOF
O manipulador planar a 2 graus de liberdade (degrees of freedom - DOF) o mais simples dos
manipuladores interessantes, e a atribuio de sistemas de coordenadas relativamente bvia; bastar
atender ao eixo das duas juntas, e o resto sai naturalmente. Outras configuraes seriam possveis mas
sem vantagens adicionais. Podemos agora determinar as suas expresses de cinemtica directa usando a
relao (4.1) e fazendo as simplificaes de escrita C1 = C1 e S1 = S1:
Cinemtica Directa de Manipuladores Pgina 4-9
Robtica Industrial, 2001-2002, V. Santos
( ) ( )
( ) ( )
( ) ( )
1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1
1
0 0 0
0 0 0
0 0 1 0 0 0 0 0
0 0 0 1 0 0 0 1
C S C S S l C C S l C
S C C C S l S S C l S
S C
l
1
l
l l
l l
l l
= =
l l
l l
l l
l l
l l
l l
A ,
2 2 2
2 2 2 2
2
0
0
0 0 1 0
0 0 0 1
C S l C
S C l S
2
l
l
l
l
=
l
l
l
l
l
l
A
Multiplicando as expresses obtidas vir:
1 1 1 1 2 2 2
1 1 1 1 2 2 2 2
0
2
0 0
0 0
0 0 1 0 0 0 1 0
0 0 0 1 0 0 0 1
R
H
C S l C C S l C
S C l S S C l S
2
l l
l l
l l
l l
= =
l l
l l
l l
l l
l l
l l
T T
1 2 1 2 1 2 1 2 2 1 2 2 1 2 1 1
1 2 1 2 1 2 1 2 2 2 1 2 2 1 1 1
0
0
0 0 1 0
0 0 0 1
R
H
C C S S C S S C l C C l S S l C
S C C S S S C C l C S l S C l S
+ l
l
l
+ + +
l
=
l
l
l
l
l
l
T
+
Que, fazendo C12 = C1+2 = C(1+2), podemos simplificar em:
12 12 2 12 1 1
12 12 2 12 1 1
0
0
0 0 1 0
0 0 0 1
R
H
C S l C l C
S C l S l S
+ l
l
l
+
l
=
l
l
l
l
l
l
T
(4.2)
Analisando esta matriz podemos desde logo individuar as coordenadas (x,y,z) do end-effector do
manipulador. Dada a simplicidade do manipulador, era possvel obter estas mesmas coordenadas por
anlise geomtrica directa como se demonstra na Figura 4.16. Porm, a matriz de transformao alm de
ser genrica, possui mais informao. Por exemplo, dela se extrai tambm que a orientao do sistema de
coordenadas da mo (xH,yH) aponta nas novas direces dadas pelos vectores [C12 S12]
T
e [S12 C12]
T
,
respectivamente. Mais uma vez claro que estas orientaes tambm se deduziriam pela anlise
geomtrica, mas no de forma to directa.
Coordenada x do extremo do manipulador:
( )
1 1 2 1 2 1 1 2
cos cos x L L LC L C = + + = +
12
12
Coordenada y do extremo do manipulador:
( )
1 1 2 1 2 1 1 2
sin sin y L L L S L S = + + = +
1
y
x
2
L cos (
1
+
2
)
L cos
1
Figura 4.16 - Coordenadas para um manipulador planar a 2 DOF
Cinemtica Directa de Manipuladores Pgina 4-10
Robtica Industrial, 2001-2002, V. Santos
Um manipulador no planar a 2 DOF
z
1
z
2
x
0
y
1
y
2
x
2
y
0
2
L
2
z
0
1
x
1
L
1
Elo
l d
1
1
+90
0 L
1
2
2
0 L
2
0
Figura 4.17 - Sistemas de coordenadas e parmetros cinemticos de um robot de 2 DOF no espao a 3D
O manipulador 2 DOF no espao 3D, embora simples, j exigiu mais alguma ateno na atribuio
dos sistemas de coordenadas. Vejamos, por exemplo, o caso do referencial da base. Se x0 no tivesse a
direco indicada e apontasse ao invs na direco simtrica de y0 (indicado), e dada a direco
apresentada por x1, o ngulo de junta 1 (que se mede de x0 para x1 em torno de z0) teria de ter um termo
constante que seria neste caso +90, ou seja (1+90)! S assim se garantiria uma expresso correcta do
referencial da mo em relao ao referencial de origem (x0, y0, z0). Repare-se tambm que neste
manipulador j h distncia entre elos, d1 = L1.
As expresses para obter a cinemtica directa so as seguintes:
( ) ( )
( ) ( )
( ) ( )
1 1 1 1 1 1
1 1 1 1 1 1
1
1 1
90 90 0 0 0
90 90 0 0 0
0 90 90 0 1 0
0 0 0 1 0 0 0
C S C S S C C S
S C C C S S S C
S C L
l
l
l
l
= =
l
l
l
l
l
l
A
1
L
l
l
l
l
l
l
l
l
l
l
2
( ) ( )
( ) ( )
( ) ( )
2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2
2
0 0 0
0 0 0
0 0 1 0 0 0 0 0
0 0 0 1 0 0 0 1
C S C S S L C C S L C
S C C C S L S S C L S
S C
l l
l l
l l
l l
= =
l l
l l
l l
l l
l l
l l
A
(4.3)
1 1 1 2 1 2 1 2 1 2 2 2 2 2
1 1 1 2 1 2 1 2 1 2 2 2 2 2
1 2 2
0 0 0
0 0 0
0 0 1 0 0 1 0 0
0 0 0 1 0 0 0 1 0 0 0 1
R
H
C S C C C S S L C C C S L C
S C S C S S C L S C S C L S
L S C
l l
l l
l l
l l
= =
l l
+
l l
l l
l l
l l
l l
T
2 2 1
L S L
l
l
l
l
l
l
l
l
l
l
Como esperado, os resultados so um pouco mais complexos, mas mesmo assim verificveis por
uma anlise geomtrica. Por exemplo, observa-se que a coordenada z dada pela soma L2S2+L1. Se 2 for
maior que zero e menor que 90, ou seja, quando a junta 2 levanta o elo que lhe sucede, v-se que
coordenada z da posio de repouso L1 (como indicado na Figura 4.17), adicionado um termo
proporcional ao comprimento do segundo elo afectado do seno do ngulo da sua orientao. Outras
observaes similares se poderiam fazer.
Cinemtica Directa de Manipuladores Pgina 4-11
Robtica Industrial, 2001-2002, V. Santos
4.3.2 Algoritmo de Denavit-Hartenberg
Nos exemplos anteriores, a atribuio dos sistemas de coordenadas foi muito emprica, tendo-se
usado o eixo da junta e procurado que os diversos eixos x sassem sempre colineares para facilitar a
definio do ngulo de junta, conforme definio j referida na seco 4.2.2.; obter as expresses da
cinemtica directa a partir dos parmetros tabelados foi feito sem dificuldades de maior. No entanto, se
os manipuladores se complicarem o procedimento complica-se e dever-se- recorrer a uma metodologia
mais sistemtica. O algoritmo de Denavit-Hartenberg (algoritmo D-H) prope essa metodologia muito bem
estruturada para, no algoritmo da cinemtica directa, obter os sistemas de coordenadas e as
transformaes associadas a cada elo de um manipulador. Para ser aplicado, as juntas tm de estar
numeradas por ordem crescente, comeando pela base do manipulador. Pode ser dividido em 4 etapas
fundamentais que se subdividem em vrios passos elementares repetidos parcialmente em ciclos,
consoante o nmero de elos do manipulador. Na Tabela 4.2, que descreve o algoritmo, admite-se que o
manipulador tem n juntas e para ele se definiro n+1 sistemas de coordenadas, sendo o ltimo o
associado mo ou garra.
1
Estabelecer o sistema de coordenadas (x
0
, y
0
, z
0
) na base de suporte, com z
0
ao longo do eixo da
junta 1. Convencionar x
0
e y
0
de forma conveniente.
For i=1 to n-1
2.1 Definir eixo junta i e alinhar z
i
com eixo da junta i+1
2.2 Definir O
i
(origem do sistema de coordenadas) de um dos seguintes modos:
2.3
Interseco de z
i
com z
i-1
Interseco da normal comum entre z
i
e z
i-1
com z
I
2.4 Definir x
i
= (z
i-1
z
i
), ou ao longo da normal comum a z
i-1
e z
i
quando so paralelos
2
2.5 Definir y
i
= z
i
x
I
Next i
3
Estabelecer o sistema de coordenadas da mo O
n
(o ltimo). Normalmente, a junta n rotacional:
z
n
colinear com z
n-1
e a apontar para fora
x
n
normal a z
n
e z
n-1
y
n
de acordo com o sistema directo usual
Determinar parmetros de elos e juntas
For i = 1 to n
4.1
( )
1
1 1
,
i
i i i z
d O z x
=
i
; a varivel de junta se for prismtica
4.2
( )
1
,
i
i i i i x
l O z x
=
4.3
( )
1
1
,
i
i i
z
x x
=
i
; a varivel de junta se for rotacional
4
4.4
( )
1
,
i
i i i
x
z z
=
Next i
Tabela 4.2 - Algoritmo de Denavit-Hartenberg para um manipulador com n juntas
4.3.3 Representao de Denavit-Hartenberg para um PUMA de 6 DOF
Um exemplo interessante de obteno de sistemas de coordenadas por ser visto na Figura 4.18.
Trata-se de um manipulador do tipo PUMA com 6 graus de liberdade, que um robot com grande
expresso prtica a nvel industrial. O exemplo pode parecer algo elaborado mas, sendo um exemplo
extrado da bibliografia, relevante que se faam todavia algumas observaes em relao ao
representado.
O sistema de eixos (x0, y0, z0) poderia ter sido colocado na base. Isso alteraria apenas um dos
parmetros cinemticos do primeiro elo (translao em z)
Os eixos x0 e y0 poderiam estar rodados +90 em torno de z0. Essa tambm uma variante
Cinemtica Directa de Manipuladores Pgina 4-12
Robtica Industrial, 2001-2002, V. Santos
comum.
Os eixos z1, z2 e z4 poderiam apontar no sentido oposto, que teria como consequncia sentidos
opostos para y1, y2 e y4. A principal diferena das duas alternativas seria o sentido de rotao
positiva para os ngulos de junta para o observador, mas de resto no haveria alteraes que
afectassem a resoluo do sistema.
O manipulador no est representado na sua posio zero! Para isso os elos deveriam estar
orientados de tal forma que todos os eixos xi fossem paralelos. No estando na posio zero
dever-se- ter algum cuidado na determinao dos diversos ngulos de junta j que alguns
tero termos constantes adicionais de +90, mormente 1 e 3.
Junta i
i
i
1 90 -90
2 0 0
3 90 90
4 0 90
5 0 -90
6 0 0
Figura 4.18 - Exemplo de sistemas de coordenadas para um PUMA de 6 DOF e indicao de e na
4.4 Exemplos de construo da Cinemtica Directa
De seguida apresentam-se dois exemplos de implementao da cinemtica directa de dois
manip
4.4.1 Um manipulador a 5 DOF (Microbot Alpha II)
Aplicando o algoritmo de Denavit-Hartenberg possvel chegar soluo ilustrada na Figura 4.19
para o
configurao ilustrada
uladores usando o algoritmo de Denavit-Hartenberg: um manipulador antropomrfico de 5 DOF e
um SCARA a 4 DOF.
s sistemas de coordenadas de um manipulador do tipo Microbot Alpha II.
Cinemtica Directa de Manipuladores Pgina 4-13
Robtica Industrial, 2001-2002, V. Santos
z
1
z
2
x
0
y
1
y
2
x
2
y
0
2
z
0
x
1
L
B
L
C
L
D
L
A
5
z
3
y
5
z
4
y
4
x
4
z
5
x
3
y
3
x
5
Elo l d
1
1
+90 0 L
A
2
2
0 L
B
0
3
3
0 L
C
0
4
4
+90 +90 0 0
5
5
0 0 L
D
Figura 4.19 - Sistemas de coordenadas para um manipulador antropomrfico a 5 DOF
As origens O3 e O4 coincidem, pois que O4 dado pela interseco de z4 com z3. Note-se tambm
que o robot no est na posio zero e, por isso, a junta 4 tem na definio da sua varivel o termo
correctivo de +90, ou seja, nesta posio inicial, na qual os ngulos de junta assumem o valor zero, o
eixo x4 j est "adiantado" 90 em relao a x3.
Na sequncia do algoritmo da cinemtica directa basta obter as matrizes de transformao
associadas a cada elo, usando a expresso (4.1), e ps-multiplic-las em sequncia. Para a primeira
matriz vem:
( ) ( )
( ) ( )
( ) ( )
1 1 1 1 1 1
1 1 1 1 1 1
1
90 90 0 0 0
90 90 0 0 0
0 90 90 0 1 0
0 0 0 1 0 0 0
A A
C S C S S C C S
S C C C S S S C
S C L
l
l
l
l
= =
l
l
l
l
l
l
A
1
L
l
l
l
l
l
l
l
l
l
l
2 3
Para as matrizes seguintes, tambm imediato chegar s suas expresses:
2 2
2 2 2
2
0
0
0 0 1 0
0 0 0 1
B
B
C S L C
S C L S
l
l
l
l
=
l
l
l
l
l
l
A ,
3 3
3 3 3
3
0
0
0 0 1 0
0 0 0 1
C
C
C S L C
S C L S
l
l
l
l
=
l
l
l
l
l
l
A ,
( ) ( )
( ) ( )
4 4 4
4 4
4 4
4
90 0 90 0 0 0
0 0
90 0 90 0
0 1 0 0
0 1 0 0
0 0 0 1
0 0 0 1
C S S
C S
S C
l + +
4
C l
l
l
l
l
+ +
l
l
= = l
l
l
l
l
l
l
l
l l l
l
A ,
5 5
5 5
5
0 0
0 0
0 0 1
0 0 0 1
D
C S
S C
L
l
l
l
l
=
l
l
l
l
l
l
A
A expresso final da transformao geomtrica do referencial da base para o referencial da mo
obtm-se pela seguinte multiplicao:
Cinemtica Directa de Manipuladores Pgina 4-14
Robtica Industrial, 2001-2002, V. Santos
1 1
1 1
0 0
0 0
0 1 0
0 0 0 1
R
H
A
C S
S C
L
l
l
l
l
=
l
l
l
l
l
l
T
2 2
2 2 2
0
0
0 0 1 0
0 0 0 1
B
B
C S L C
S C L S
l
l
l
l
l
l
l
l
l
l
2
3 3
3 3 3
0
0
0 0 1 0
0 0 0 1
C
C
C S L C
S C L S
3
l
l
l
l
l
l
l
l
l
l
4 4
4 4
0 0
0 0
0 1 0 0
0 0 0 1
S C
C S
l
l
l
l
l
l
l
l
l
l
5 5
5 5
0 0
0 0
0 0 1
0 0 0 1
D
C S
S C
L
l
l
l
l
l
l
l
l
l
l
Repartindo o produto em dois termos fundamentais, (A1A2A3)(A4A5), vir:
( )
( )
( )
1 2 3 1 2 3 1 2 3 1 2 3 1 1 2 3 1 2 3 1 2 5 5 4 4 4
5 5 4 4 4 1 2 3 1 2 3 1 2 3 1 2 3 1 1 2 3 1 2 3 1 2
2 3 2 3 2 3 2 3 2 3 2 3 2
0
0 0 0 1
C B D
D C B
R
H
C B A
C C C C S S C C S C S C S L C C C C S S L C C S C S S C L C
C C C S S L S C C S S S S C S S S C C L S C C S S S L S C
S C C S S S C C L S C C S L S L
l +
l
l
+
l
l =
l
+ + + + +
l
l
l
l
l
T
4
5 5
0 0
0 0 0 1
C
S C
4
l
l
l
l
l
l
l
l
l
l
Ou, recorrendo a relaes trigonomtricas, numa forma mais simplificada:
( )
( )
( )
1 2 3 123 1 2 3 123 1 1 2 3 123 1 2 5 5 4 4 4
5 5 4 4 4 123 1 2 3 123 1 2 3 1 123 1 2 3 1 2
5 5
23 23 23 2
2 2
2 2
1
2 0 0
2 2 0 2
0 0 0 1
0 0 0 2
C B D
D C B
R
H
C B A
C C S S S L C C L C C S C S S C L C
C C C S S L C S S C C C L S S L S C
S C
S C L S L S L
l + + +
4
4
l
l
l
+ + +
l
l =
l
+ +
l
l
l
l l
l
T
l
l
l
l
l
l
l
l
(4.4)
Recorde-se que C1-2-3 = cos(123) e C123 = cos(1+2+3), etc. O resultado final, por extenso, tem
uma representao com uma dimenso grfica muito grande e praticamente sem interesse neste
momento. O recurso a meios numrico-computacionais , por isso, recomendado para a obteno de
valores concretos.
Para efeitos de verificao admitamos, por exemplo, que todas as juntas tem valor 0, ou seja, a
representao ilustrada na Figura 4.19. Assim, por substituio directa na expresso anterior teramos:
0 0 1 0 0 1 1 0 0
0 1 0 0 0 0 1 0 1 0 0
0 1 0 0 0 1 0 0 1 0 0
0 0 0 1 0 0 0 1 0 0 0 1
D B C B
D
R
H
A
L L L L L
L
L
+ + +
C D
L l l l
l l l
l l
l
l l
= =
l
l l l
l l l
l l l
l l l
l l l
l l
T
l
Desta expresso sai que a origem do sistema de coordenadas da mo est em (LB+LC+LD, 0, LA),
que x4 aponta na direco de z0, y4 aponta na direco simtrica de y0, e z4 aponta na direco de x0, o
que se confirma observando a Figura 4.19.
4.4.2 Um manipulador do tipo SCARA (4 DOF)
Um manipulador muito usado na prtica o SCARA de 4 graus de liberdade, de que se ilustra
uma representao na Figura 4.20. As 4 juntas foram numeradas obedecendo sua ordem de
aparecimento a partir da base. Podem surgir dvidas, na junta 3, se, na verdade, a ordem a
representada. Esta representao assume que a junta rotacional do punho est aps a junta prismtica,
e que de facto o caso mais comum. Porm, tambm se poderia ter o caso que a junta rotacional
estivesse "antes" da prismtica, implicando um sistema mecnico diverso que realmente suportasse a
junta linear "sobre" um elo que poderia rodar em torno de si prprio. Nesse caso a ordem das juntas seria
a inversa da indicada e tambm os parmetros cinemticos seriam outros, mas o resultado final seria o
mesmo.
Cinemtica Directa de Manipuladores Pgina 4-15
Robtica Industrial, 2001-2002, V. Santos
Elo l d
1
1
+180 L
B
L
A
2
2
0 L
C
0
3 0 0 0 d
3
4
4
0 0 L
D
x
0
y
0
z
0
J
1
L
C
L
B
L
A
L
D
J
2
J
3
J
4
x
0
y
0
z
0
z
1
z
2
z
3
z
4
x
1
x
2
x
3
x
4
y
1
y
2
y
3
y
4
1
2
4
d
3
L
3
L
A
L
B
L
C
Figura 4.20 - Sistemas de coordenadas e parmetros cinemticos para um SCARA de 4 DOF
Note-se que na representao o manipulador no est na posio zero. Em especial notrio a
junta prismtica que, para melhor visualizao, est estendida apresentando, por isso, um valor de junta
no nulo.
A metodologia seguida similar do manipulador anterior e, assim, a determinao das matrizes
de transformao tambm muito sistemtica. Vir portanto:
( ) ( )
( ) ( )
( ) ( )
1 1 1 1 1 1
1 1 1 1 1 1 1
1
180 180 0
180 180 0
0 180 180 0 0 1
0 0 0 1 0 0 0 1
B B
B B
A A
C S C S S L C C S L C
S C C C S L S S C L S
S C L
1
L
l l
l l
l
l
l
= =
l
l
l
l l
l l
l l
l l
l
A
l
2
2
2 2
2 2
2
0
0
0 0 1 0
0 0 0 1
C
C
C S L C
S C L S
l
l
l
l
=
l
l
l
l
l
l
A ,
3
3
1 0 0 0
0 1 0 0
0 0 1
0 0 0 1
d
l
l
l
l
=
l
l
l
l
l
l
A ,
4 4
4 4
4
0 0
0 0
0 0 1
0 0 0 1
D
C S
S C
L
l
l
l
l
=
l
l
l
l
l
l
A
A matriz final, resultante dos quatro produtos, aps simplificaes de ndole trigonomtrica, dada
pela expresso seguinte, onde se convenciona ainda que C1-2 = cos(1-2), C1-2-4 = cos(1-2-4), etc.:
(4.5)
1 2 4 1 2 4 1 1 2
1 2 4 1 2 4 1 1 2
3
0
0
0 0 1
0 0 0 1
B C
B C
R
H
D A
C S L C L C
S C L S L S
L d L
+ l
l
l
+
=
l
l
l
l
l
T
l
l
Mais uma vez se pode confirmar a sua validade para o caso das juntas terem todas o valor 0 e,
neste caso, at mesmo para outros valores, dada a relativa simplicidade do manipulador quando
comparado com o Microbot Alpha II, apresentado anteriormente. Assim, pelo menos no que respeita a
componente de translao cartesiana (x, y, z), pode-se constatar a veracidade da expresso anterior
observando a Figura 4.21 onde se ilustra esquematicamente uma vista de cima do manipulador; note-se
porm que desta figura no se podem tirar concluses relativamente coordenada z.
Cinemtica Directa de Manipuladores Pgina 4-16
Robtica Industrial, 2001-2002, V. Santos
y
0
x
0
4
y
4
x
4
L
B
L
C
1 1
1 1
B C
B C
x L C L C
y L S L S
= +
= +
2
2
=
Figura 4.21 - Vista esquemtica de cima do manipulador SCARA
4.5 ngulos finais de orientao em funo das variveis de junta
Para completar o algoritmo da cinemtica directa delineado na seco 4.1.3 falta ainda o seu
ltimo ponto, que determinar os ngulos de orientao final do sistema de coordenadas na mo, ou, se
se preferir, os ngulos de Euler. Como visto num captulo anterior, existem diversos tipos de ngulos de
Euler sendo dois deles mais comuns, dos quais se escolhe o caso RPY para ilustrar esta parte final do
algoritmo. Note-se todavia que o procedimento seria estritamente o mesmo para qualquer outro tipo de
ngulos de orientao (Euler) porque nos baseamos afinal na matriz de transformao associada. O
problema que est aqui em causa o de determinar os ngulos de Euler a partir dos elementos da matriz
de transformao do manipulador.
4.5.1 Comparao da matriz RPY(,,) coma parte rotacional da matriz
R
TH
A expresso genrica de transformao global no espao a 6 dimenses, usando ngulos RPY,
dada por:
(4.6)
( ) ( )
( ) ( ) ( ) ( )
, , , ,
, , , , ,
R
x y z
H
x y z
x
y
transformao transformao
Trans p p p RPY
de translao de orientao
Trans p p p Rot z Rot y Rot x
C C S C C S S S S C S C p
S C C C S S S C S S S C p
S C S C C
l l
l l
= =
l l
l l
l l
= =
+ +
+ +
=
T
0 0 0 1
z
p
l
l
l
l
l
l
l
l
l
l
A matriz de transformao do manipulador resulta do produto das transformaes intermdias dos
N elos e pode ser expressa do seguinte modo:
1 2
...
0 0 0 1
0 0 0 1
x x x x
y y y y
R
H N
z z z z
n s a p
n s a p
n s a p
l
l
l l
l l
= = =
l l
l l l
l
l
l
n s a p
T A A A
Se o vector p tem um significado de imediato entendimento (coordenadas da origem do sistema da
mo medidas no sistema de origem), o mesmo no se aplica aos trs vectores individualizados na
expresso anterior, n
, s
, a
, e que esto associados orientao do sistema de eixos da mo em relao
ao sistema de referncia de base.
Para se entender melhor o significado destes trs vectores fazem-se as atribuies ilustradas na
Cinemtica Directa de Manipuladores Pgina 4-17
Robtica Industrial, 2001-2002, V. Santos
Figura 4.22. O vector a
designado por vector aproximao da mo, e tem uma direco que normal
palma da mo; o vector s
designado vector escorregamento ou deslizamento da mo (sliding) e tem a
direco do movimento dos dedos; o vector n
, finalmente, completa o sistema directo de coordenadas,
e designado por vector normal aos dedos da mo.
a
s
n
Figura 4.22 - Orientao do sistema de coordenadas da mo
Assim, por simples comparao das expresses indicadas anteriormente, pode-se escrever, por
exemplo, o seguinte:
1
1
!
1
(4.7)
sin
cos sin
sin cos
z
z
y
n
s
n
'
1 =
1
1
1
1
=
!
1
1
1
=
1
1+
( )
(
( )
arcsin
arcsin /cos
arcsin /cos
z
z
y
n
s
n
'
1 =
1
1
1
=
1
1
= 1
11+
)
Ficam assim determinados os ngulos de Euler com base na matriz de transformao do
manipulador como se pretendia. Adiante-se desde j que esta no uma boa soluo do ponto de vista
numrico, como se explica na prxima seco.
4.5.2 Limitaes de preciso e reformulao
Na seco anterior, nomeadamente na ltima expresso dos ngulos de Euler, nota-se porm que,
quando o ngulo tendo para 90, o co-seno de tende para 0, e algumas das expresses correm o risco
de perder preciso em clculo numrico. Uma hiptese alternativa utilizar mais igualdades extradas
das duas matrizes e us-las aos pares de forma a minimizar esse risco de impreciso numrica.
Poderemos ento ter as seguintes igualdades:
sin
cos sin
cos cos
z
z
z
n
s
a
'
1 =
1
1
1
1
=
!
1
1
1
=
1
1+
e
1
!
1
,
cos cos
sin cos
x
y
n
n
= '
1
=
1
+
( ) arcsin
z
n = tan
z
z
s
=
a
, tan
y
z
n
n
=
A funo tangente inversa (arco-tangente) afigura-se menos sensvel s imprecises dos termos da
matriz de transformao do manipulador, quer porque eventuais erros sistemticos nos termos se
atenuam na diviso (sz/az, etc.), quer porque o domnio da funo arco-tangente infinito e portanto sem
risco de indefinio.
Porm, a obteno dos ngulos com recuso funo arco-tangente apresenta um outro problema
ligado determinao do quadrante do ngulo em causa. Por exemplo, se az = sz = -1 ento o quociente
sz/az resultaria igual a 1 e portanto = 45. Ora, ao ponto (-1,-1) corresponde um raio-vector com o
ngulo de 135. Este erro de 180 representa o prprio perodo da funo tangente e tem de ser levado
em conta no clculo. Assim, uma aplicao cega da funo arco-tangente poder ser incorrecta; por
isso que se deve atender ao quadrante do ponto antes de calcular a arco-tangente. Muitas aplicaes de
software numrico recorrem funo arco-tangente com dois argumentos em vez de um s; existe a
vantagem adicional de poder lidar de antemo com quocientes onde o divisor seria 0. Nomes como
atan(y,x) ou atan2(y,x) so muito comuns para esta funo. A Tabela 4.3 define a funo atan2(x,y), tal
Cinemtica Directa de Manipuladores Pgina 4-18
Robtica Industrial, 2001-2002, V. Santos
como implementada na grande maioria das aplicaes de software.
Condio Definio Quadrantes
x > 0 arctan
y
x
1 e 4
x = 0 y 0
( ) sign y
2
Eixo das ordenadas
x < 0
( ) arctan sign
y
y
x
+ 2 e 3
x = 0 y = 0
No se define, mas o valor 0 por vezes atribudo
Tabela 4.3 - Definio da funo atan2(y,x)
Para alguns manipuladores, ou algumas configuraes especficas, as expresses extradas das
matrizes de transformao, pelas variveis e termos que incluem, no se proporcionam ao uso directo da
funo arco-tangente. Nesses casos, poder o problema ser reformulado usando uma tcnica
relativamente simples: a de reorganizar a equao matricial por pr- ou ps-multiplicao de
transformaes parciais, ou seja, passar, por exemplo, da frmula:
( ) ( ) ( ) ( ) , , , , ,
R
x y z
Trans p p p Rot z Rot y Rot x = T
( ) ( ) ( ) ( )
1 1
, , , , ,
R
Rot z Trans p p p Rot y Rot x
= T
1
0 0 0 0
0
1
C S C S
H
frmula:
x y z
H
Usando propriedades apresentadas anteriormente, podemos obter as expresses das matrizes
inversas de uma forma muito imediata:
( )
1
0 0 0 0
,
0 0 1 0 0 0 1
0 0 0 1 0 0 0
S C S C
Rot z
l l
l
l
l
= =
l
l l
l l
l l
l l
l l
l l
1 0 0 1 0 0
x x
p p l l
l
l l
( )
1
0 1 0 0 1 0
, ,
0 0 1 0 0 1
0 0 0 0 0 0 0 0
y y
x y z
z z
p p
Trans p p p
p p
l
l l
l l
= = l l
l l
l l
l l
l l
l l
0
x
C S p l
x x x x
n s a p
l
1 0 0 0 0 0
0
C S
O que resulta em:
0
0 0 1
0 0 0 1
y
z
S C p
p
l
l
l
l
l
l
l
l
l
0 0 0 1
y y y y
z z z z
n s a p
n s a p
l
l
l
l
l
l
l
l
=
0 1 0 0 0 0
0 0 0
0 0 0 1 0 0 0 1
C S
S C S C
l l
l l
l l
l l
l l
l l
l l
l l
l l
l l
e finalmente:
0 0
1
x y x y x y
C S S S S n C n S s C s S a C a S + + +
0 0 0
0 0
0 0 0 1 0 0 0
y x y x x y
z z z
C S n C n S s C s S a C a S
n s a S C S C C
l l
l l
l l
=
l l
l l
l l
l l
l l
l l
(4.8)
l l
Podemos agora repetir o processo j levado a cabo anteriormente (comparar as matrizes termo a
termo) e extrair mais alguns resultados. Assim, poderemos obter sucessivamente os ngulos , e :
Cinemtica Directa de Manipuladores Pgina 4-19
Robtica Industrial, 2001-2002, V. Santos
para : 0
y x
n C n S = arctan
y
x
n
n
=
para :
x y
z
n C n S C
n S
+ = '
1
1
!
1 =
1
+
arctan
z
x y
n
n C n S
=
+
para :
z
z
s C S
a C C
= '
1
1
!
1 =
1
+
arctan
z
z
s
a
=
Note-se porm que h outras expresses que poderiam ser usadas. O que ficou assim garantido foi
o recurso exclusivo da funo arco-tangente em detrimento de arco-seno ou arco-co-seno. Nas
expresses acima, onde se l arctan, assume-se atan2, na definio dada.
4.5.3 Exemplo de aplicao a um manipulador com 2 DOF em 3 dimenses.
A matriz de transformao para o manipulador descrito na Figura 4.17, como derivado na ocasio,
dada por:
1 2 1 2 1 2 1 2
1 2 1 2 1 2 1 2
2 2 2 2
0
0 0 0 1
R
H
C C C S S L C C
S C S S C L S C
S C L S L
l
l
l
l
=
l
+
l
l
l
l
l
T
1
0 0 0 1
x x x x
y y y y
z z z z
n s a p
n s a p
n s a p
=
l
l
l
l
l
l
l
l
l
z1 z2
x0
y1
y2
x2
y0
2
L2
z0
1
x1
L1
Assim, para esse manipulador, determinem-se os seus ngulos de Euler, isto , a sua orientao
no espao cartesiano relativamente ao referencial da base. Aplicando os resultados da seco anterior
poderemos obter, por simples substituio, o seguinte:
arctan
y
x
n
n
= ( )
1 2
1 1
1 2
arctan arctan tan
S C
C C
= = =
arctan
z
x y
n
n C n S
=
+
2 2
2
1 2 1 1 2 1 2
arctan arctan
1
S S
C C C S C S C
= =
+
=
arctan
z
z
s
a
= ( )
2
arctan , 0
2
C
= (ou -/2 se || > /2) =
Cinemtica Directa de Manipuladores Pgina 4-20
Você também pode gostar
- 1 5174916506227573289Documento81 páginas1 5174916506227573289papagaiuAinda não há avaliações
- 587191-2.tabela Transformada de LaplaceDocumento2 páginas587191-2.tabela Transformada de Laplacepapagaiu0% (1)
- 640214-3.funções de Transferência e Diagramas de BlocosDocumento41 páginas640214-3.funções de Transferência e Diagramas de BlocospapagaiuAinda não há avaliações
- 640214-3.funções de Transferência e Diagramas de BlocosDocumento41 páginas640214-3.funções de Transferência e Diagramas de BlocospapagaiuAinda não há avaliações
- 586581-1lista 01 PDFDocumento1 página586581-1lista 01 PDFpapagaiuAinda não há avaliações
- Apostila - CLP - LadderDocumento30 páginasApostila - CLP - Ladderwillianamigo189667% (3)
- Normas CoelbaDocumento50 páginasNormas CoelbapapagaiuAinda não há avaliações
- Dados Motores WegDocumento9 páginasDados Motores Wegpapagaiu77% (13)
- Os Misterios Da Floresta NegraDocumento253 páginasOs Misterios Da Floresta NegraJose Brandao100% (1)
- Projeto Residencial Com MicroinversorDocumento1 páginaProjeto Residencial Com MicroinversorArthur Oliveira50% (4)
- Romeu SassakiDocumento5 páginasRomeu SassakiNatiAltavaAinda não há avaliações
- Mod 22 - Funções Da LinguagemDocumento16 páginasMod 22 - Funções Da LinguagemPatrick SantanaAinda não há avaliações
- A História Dos Problemas Da Tautócrona e Da BraquistócronaDocumento106 páginasA História Dos Problemas Da Tautócrona e Da BraquistócronaClaudio BorgesAinda não há avaliações
- BARUCH Espinosa - Origem e Natureza Dos Afetos - Razão InadequadaDocumento6 páginasBARUCH Espinosa - Origem e Natureza Dos Afetos - Razão InadequadaGeraldo Barbosa NetoAinda não há avaliações
- Sexualidade em FilmesDocumento231 páginasSexualidade em FilmesAleques EitererAinda não há avaliações
- Noticias Diversas 3Documento565 páginasNoticias Diversas 3Elcio GeremiasAinda não há avaliações
- Jogos MatematicosDocumento67 páginasJogos Matematicosanacatant100% (3)
- Alimentos, Necessidade e PossibilidadeDocumento5 páginasAlimentos, Necessidade e PossibilidademanoeljgAinda não há avaliações
- A Instrução Agrícola e o Trabalho LivreDocumento66 páginasA Instrução Agrícola e o Trabalho LivreAndrea Lucia Silva LimaAinda não há avaliações
- Cap 01 Desafios Psicossociais Da Familia Contemporanea Pesquisas e ReflexoesDocumento26 páginasCap 01 Desafios Psicossociais Da Familia Contemporanea Pesquisas e ReflexoesMaikol Tiago RibeiroAinda não há avaliações
- Pentecostais Migracao e Redes ReligiosasDocumento179 páginasPentecostais Migracao e Redes ReligiosasWanderson GabrielAinda não há avaliações
- 5 - A Revolucao Da Ternura Do Papa FranciscoDocumento1 página5 - A Revolucao Da Ternura Do Papa FranciscoMichelle Vitor dos Santos VichesiAinda não há avaliações
- Direito Dos Contratos IDocumento58 páginasDireito Dos Contratos IMargarida Monteiro100% (2)
- Lição 2 - e Todos Foram Cheios Do Espírito SantoDocumento8 páginasLição 2 - e Todos Foram Cheios Do Espírito SantoJarbas GuedesAinda não há avaliações
- A Igreja de ÉfesoDocumento4 páginasA Igreja de ÉfesoJoelden RochaAinda não há avaliações
- Artigo - A Educação para A Autonomia em Paulo FreireDocumento12 páginasArtigo - A Educação para A Autonomia em Paulo Freirefelipe freitas tellesAinda não há avaliações
- Dario IIIDocumento2 páginasDario IIIjoaAinda não há avaliações
- Retiro CurayDocumento12 páginasRetiro Curaywilsoncmonteiro2Ainda não há avaliações
- Direito Processual Do Trabalho - Resenha 2Documento2 páginasDireito Processual Do Trabalho - Resenha 2NeoAinda não há avaliações
- Kurosawa e Psicologia AnalíticaDocumento88 páginasKurosawa e Psicologia AnalíticaAnonymous 8zlMz9ZHAinda não há avaliações
- O Plano Da SalvaçãoDocumento4 páginasO Plano Da SalvaçãoMarcos Antonio BarrosAinda não há avaliações
- Funcionalismo - Referência Histórica para o Design SocialDocumento9 páginasFuncionalismo - Referência Histórica para o Design SocialjessicarrsAinda não há avaliações
- Cultura Banto Traduzido P 2Documento1.176 páginasCultura Banto Traduzido P 2Demetrio Cesar Moura75% (4)
- Metamorfoses Do Trabalho. André GorzDocumento7 páginasMetamorfoses Do Trabalho. André GorzPedro Faleiro BeçaAinda não há avaliações
- A Arvore Da Vida Da Cabala (As 10 Sephiroth)Documento8 páginasA Arvore Da Vida Da Cabala (As 10 Sephiroth)Kefah Ben YehudahAinda não há avaliações
- Cristo e Os DemôniosDocumento5 páginasCristo e Os DemôniosFelipe LemesAinda não há avaliações
- A Paz - Gilberto GilDocumento2 páginasA Paz - Gilberto GilNatanael Martins de SousaAinda não há avaliações
- E-Branding SpoletoDocumento14 páginasE-Branding SpoletoManuela BaggettiAinda não há avaliações