Escolar Documentos
Profissional Documentos
Cultura Documentos
2005 Libras Gabardo
2005 Libras Gabardo
Enviado por
tecorrea0 notas0% acharam este documento útil (0 voto)
3 visualizações63 páginasDireitos autorais
© © All Rights Reserved
Formatos disponíveis
PDF, TXT ou leia online no Scribd
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
© All Rights Reserved
Formatos disponíveis
Baixe no formato PDF, TXT ou leia online no Scribd
0 notas0% acharam este documento útil (0 voto)
3 visualizações63 páginas2005 Libras Gabardo
2005 Libras Gabardo
Enviado por
tecorreaDireitos autorais:
© All Rights Reserved
Formatos disponíveis
Baixe no formato PDF, TXT ou leia online no Scribd
Você está na página 1de 63
Centro Universitrio Positivo - UnicenP
Ncleo de Cincias Exatas e Tecnolgicas NCET
Engenharia da Computao
Tiago Machado Gabardo
Reconhecimento Computacional da Lngua Brasileira
de Sinais
Curitiba
2005
Centro Universitrio Positivo - UnicenP
Ncleo de Cincias Exatas e Tecnolgicas NCET
Engenharia da Computao
Tiago Machado Gabardo
Reconhecimento Computacional da Lngua Brasileira
de Sinais
Monografia apresentada disciplina de
Projeto Final, como requisito parcial
concluso do Curso de Engenharia da
Computao. Orientador: Prof. Jos
Carlos da Cunha.
Curitiba
2005
TERMO DE APROVAO
Tiago Machado Gabardo
Reconhecimento Computacional da Lngua Brasileira de Sinais
Monografia aprovada como requisito parcial concluso do curso de Engenharia
da Computao do Centro Universitrio Positivo, pela seguinte banca examinadora:
Prof. Jos Carlos da Cunha
Prof. Edson Pedro Ferlin
Prof. Valfredo Pilla Jr.
Curitiba, 01 de janeiro de 2006.
AGRADECIMENTOS
Este trabalho no seria possvel sem a ajuda direta ou indireta de algumas
pessoas a quem sinto a obrigao de agradecer.
Aos amigos do laboratrio Alto Desempenho que muito contriburam para a
elevao do meu conhecimento tcnico durante a execuo dos projetos.
Aos meus amigos, especialmente Gilberto e Rafael, por terem entendido a minha
ausncia devido a este trabalho e a compromissos da graduao. Tambm pelos
momentos de alegria e descontrao que serviram como um apoio para mim.
Ao meu orientador e amigo, professor Cunha, por ter dado a idia e confiado este
projeto a mim. Tambm pela confiana na execuo do mesmo e, por todas as
oportunidades de crescimento pessoal e profissional que me proporcionou com a
sugesto de projetos durante o curso.
Para minha irm, Renata, que sempre ficou feliz pelas minha conquistas.
Para minha av Rosa e tias Doroti, Tereza e Nelsi que tiveram um papel
fundamental na minha infncia. Especialmente s minhas tias Nelvi e Cida, por terem,
desde a minha infncia, participado ativamente da minha educao e vida escolar.
Tambm por me acolherem em Curitiba. Obrigado pela constante prontido em ajudar
e por me tratarem como um verdadeiro filho.
Aos meus pais, Renato e Lidia, por nunca terem medido esforos para me
oferecer uma vida melhor e mais rica em oportunidades do que a que tiveram.
Obrigado por terem me ensinado o valor do esforo em tudo que fao e por nunca
terem permitido que eu desistisse de algo por causa das dificuldades encontradas. No
consigo expressar a minha admirao e gratido por todo o esforo que vocs tiveram
durante a minha educao e por terem devotado a mim grande parte de suas vidas
sem almejar nenhum retorno. No conseguimos definir o amor em palavras, mas tenho
certeza que dele faz parte essa doao incondicional.
Finalmente, agradeo a Deus por ter me oferecido oportunidades que somente
pessoas privilegiadas tm. Entre elas, a chance de receber uma educao de primeira
linha e de nascer em meio a pessoas to maravilhosas como as citadas acima.
i
SUMRIO
LISTA DE FIGURAS....................................................................................................................III
LISTA DE TABELAS...................................................................................................................IV
LISTA DE EQUAES.............................................................................................................. V
LISTA DE SIGLAS.......................................................................................................................VI
LISTA DE SIGLAS.......................................................................................................................VI
LISTA DE SMBOLOS...............................................................................................................VII
RESUMO .................................................................................................................................... VIII
ABSTRACT...................................................................................................................................IX
1 INTRODUO......................................................................................................................1
2 DESCRIO DO PROJETO..............................................................................................2
3 REVISO BIBLIOGRFICA ...............................................................................................2
3.1 LNGUAS DE SINAIS ..................................................................................................2
3.2 RECONHECIMENTO COMPUTACIONAL DE GESTOS......................................3
3.3 MEDIDAS DE TENDNCIA CENTRAL....................................................................4
3.4 MEDIDAS DE VARIAO..........................................................................................5
3.5 DISTRIBUIO NORMAL ..........................................................................................5
3.6 TEOREMA CENTRAL DO LIMITE ............................................................................5
3.7 ACELERMETROS TEORIA DE OPERAO...................................................6
3.8 SENSORES DE CURVATURA..................................................................................7
4 ESPECIFICAO TCNICA..............................................................................................8
4.1 ESPECIFICAO DO HARDWARE.........................................................................8
4.1.1 Acelermetro ADXL203...................................................................................8
4.1.2 Sensor de Curvatura Flex Sensor ................................................................10
4.1.3 Microcontrolador.................................................................................................11
4.1.4 Transmisso de dados......................................................................................12
4.1.5 Instalao dos sensores na luva......................................................................12
4.2 ESPECIFICAO DO SOFTWARE........................................................................13
5 VALIDAO DO PROJETO.............................................................................................15
6 CRONOGRAMA DO PROJETO......................................................................................16
7 ESTUDO DE VIABILIDADE ECONMICA....................................................................18
8 PROJETO DE HARDWARE.............................................................................................19
8.1 SENSORES DE CURVATURA................................................................................19
8.2 ACELERMETRO .....................................................................................................19
8.3 BUFFER DE TENSO...............................................................................................20
8.4 MICROCONTROLADOR ..........................................................................................20
8.5 TRANSMISSO SERIAL ..........................................................................................20
8.6 TRANSMISSO USB................................................................................................20
8.7 BUFFER DE COMUNICAO.................................................................................21
8.8 CIRCUITO DE ALIMENTAO...............................................................................21
8.9 SINAIS DE CONEXO..............................................................................................21
ii
9 PROJETO DE SOFTWARE..............................................................................................23
9.1 FIRMWARE .................................................................................................................23
9.1.1 Fluxograma..........................................................................................................23
9.1.2 Diagrama de Estados ........................................................................................24
9.2 SOFTWARE DE CADASTRO..................................................................................25
9.3 SOFTWARE DE ANLISE........................................................................................25
9.3.1 Anlise Estatstica..............................................................................................25
9.4 DIAGRAMAS DE CASOS DE USO.........................................................................27
9.5 DIAGRAMA DE CLASSES.......................................................................................27
9.6 DIAGRAMAS DE SEQNCIA DO SOFTWARE DE CADASTRO...................30
9.7 DIAGRAMAS DE SEQNCIA DO SOFTWARE DE RECONHECIMENTO ..34
9.8 MODELO ENTIDADE RELACIONAMENTO.........................................................36
9.9 DICIONRIO DE DADOS.........................................................................................36
9.10 PROTTIPOS DE TELA...........................................................................................37
10 RESULTADOS................................................................................................................37
11 CONCLUSO..................................................................................................................40
12 REFERNCIAS BIBLIOGRFICAS............................................................................42
13 ANEXOS..........................................................................................................................43
13.1 A.1 DIAGRAMA ESQUEMTICO DOS SENSORES E INTERFACEAMENTO
44
13.2 A.2 DIAGRAMA ESQUEMTICO DA INTERFACE DE COMUNICAO.......45
13.3 A.3 DIAGRAMA ESQUEMTICO DO MICROCONTROLADOR.......................46
13.4 A.4 PROJETO DA PLACA DE CIRCUITO IMPRESSO CAMADA TOP........47
13.5 A. 5 PROJETO DA PLACA DE CIRCUITO IMPRESSO CAMADA BOTTOM
48
13.6 A.6 MANUAL TCNICO............................................................................................49
13.7 A.7 MANUAL DO USURIO.....................................................................................67
13.8 A.8 ARTIGO CIENTFICO.........................................................................................84
13.9 A.9 FOTO 1 DO PROTTIPO DA LUVA...............................................................90
13.10 A.10 FOTO 2 DO PROTTIPO DA LUVA.........................................................91
14 GLOSSRIO ...................................................................................................................92
iii
LISTA DE FIGURAS
Figura 1 - Viso geral do sistema ..............................................................................................2
Figura 2 - Sistema massa-mola .................................................................................................7
Figura 3 - Alfabeto da LIBRAS...................................................................................................8
Figura 4 - Circuito interno do ADXL203....................................................................................9
Figura 5 - Encapsulamento do acelermetro.........................................................................10
Figura 6 - Dimenses do Flex Sensor.....................................................................................11
Figura 7 - Microcontrolador MSC1211Y5 ...............................................................................12
Figura 8 - Sensores posicionados no dorso da luva.............................................................13
Figura 9 Diagrama em blocos do software .........................................................................14
Figura 10 - Fluxograma do Firmware......................................................................................24
Figura 11 - Diagrama de estados do Firmware.....................................................................24
Figura 12 - Grfico de Distribuio dos Valores do Polegar para a Letra A.....................26
Figura 13 - Diagrama de Casos de Uso do Software de Cadastro....................................27
Figura 14 - Diagrama de Casos de Uso do Software de Reconhecimento ......................27
Figura 15 - Diagrama de Classes do Software de Cadastro...............................................28
Figura 16 - Diagrama de Classes do Software de Reconhecimento .................................29
Figura 17 - Seqncia de Incio do Software de Cadastro..................................................30
Figura 18 - Seqncia de Incluso Software de Cadastro ..................................................31
Figura 19 - Seqncia de Alterao Software de Cadastro ................................................32
Figura 20 - Sequncia de Excluso Software de Cadastro.................................................33
Figura 21 - Seqncia de Exibio dos Sensores Software de Reconhecimento...........34
Figura 22 - Seqncia Anlise dos Dados Software de Reconhecimento .......................35
Figura 23 - MER..........................................................................................................................36
Figura 24 Tela de Cadastro...................................................................................................37
Figura 25 - Tela Principal ..........................................................................................................37
iv
LISTA DE TABELAS
Tabela 1 - Estudo de Viabilidade Econmica........................................................................18
Tabela 2 - Sinais do Anexo A.1 (Sensores e Interfaceamento).........................................22
Tabela 3 - Sinais do Anexo A.2 (Transmisso de dados) ...................................................22
Tabela 4 - Sinais do Anexo A.3 (Microncontrolador) ............................................................22
Tabela 5 - Dicionrio de Dados................................................................................................36
Tabela 6 - Resultados do Reconhecimento ...........................................................................39
v
LISTA DE EQUAES
Equao 1 - Mdia Aritmtica ....................................................................................................4
Equao 2 - Desvio Padro........................................................................................................5
Equao 3 - Equao de Hooke ................................................................................................6
Equao 4 - Segunda Lei de Newton.......................................................................................6
Equao 5 - Relao das equaes de Hooke e Newton.....................................................6
vi
LISTA DE SIGLAS
ADC - Analog Digital Converter.
AC - Corrente Alternada.
DC - Corrente Contnua.
IBGE - Instituto Brasileiro de Geografia e Estatstica.
LIBRAS - Lngua Brasileira de Sinais.
MEMS - Micro Electro Mechanical System.
RAM - Random Access Memory.
USB - Universal Serial Bus.
vii
LISTA DE SMBOLOS
B - Bytes.
g - Fora da gravidade.
Hz - Hertz.
K - Kilo.
- Micro.
n - Nano.
O - Ohm.
V - Volts.
M - Mega.
viii
RESUMO
Este trabalho descreve o desenvolvimento de um equipamento composto por
uma luva equipada com sensores, interligada a um microcomputador do tipo PC, onde
executado um programa de reconhecimento da posio da mo do usurio. Este
software especializado no reconhecimento do alfabeto da Lngua Brasileira de Sinais
e pode ser usado como auxlio no aprendizado da LIBRAS e do Portugus por
deficientes auditivos, bem como por no deficientes que queiram aprender este idioma
de sinais.
A leitura da posio da mo feita com dois tipos de sensores: sensores de
curvatura e movimento. Os dados destes sensores so transformados para forma
digital e enviados para o computador atravs de um microcontrolador. Para anlise dos
dados no PC so usadas ferramentas estatsticas.
Com este mtodo, conseguiu-se um reconhecimento correto de 85% de todo
o banco de dados.
ix
ABSTRACT
This document shows the development of an equipment composed by a
glove equipped with sensors, that is connected to a computer where a software will
recognize the users position hand. This software is specialized in recognizing the
Brazilian Sign Languages alphabet and could be used to help teaching the Brazilian
Sign Language and Portuguese to deaf people, and others that are interested in this
sign language.
The hands position is measured using two types of sensors: movement and
bend sensors. The data of the sensors are passed to digital form and sent to computer
by a microcontroler. Statistics tools are used to analise these data in the computer.
Using this method, it was reached 85% of correct recognition considering the
whole data bank.
1
1 INTRODUO
Segundo dados do IBGE [1], aproximadamente 3,37% (5.7350.99 pessoas)
da populao brasileira composta por pessoas portadoras de algum tipo de
deficincia auditiva. Como pertencem a um grupo relativamente pequeno da
populao, a maioria dos deficientes auditivos se encontra margem da sociedade. Os
problemas de comunicao causados pela deficincia auditiva dificultam seriamente a
socializao do indivduo, j que a comunicao um fator importantssimo em reas
que demandam alto grau de interao social como, por exemplo, educao e mercado
de trabalho.
Nas escolas e centros especializados na educao de portadores de
necessidades especiais, so usados mtodos pedaggicos especficos para pessoas
surdas com o objetivo de fazer com que desenvolvam ao mximo sua capacidade de
comunicao. Um dos grandes diferenciais no processo educacional dos surdos o
aprendizado da LIBRAS (Lngua Brasileira de Sinais), um idioma que faz a
representao de letras, palavras e expresses complexas atravs de sinais corpreos.
Os sinais geralmente englobam expresses faciais e gestos com braos e mos.
possvel que um surdo desenvolva a habilidade para se comunicar atravs
da fala, mas h consenso entre os especialistas [2] de que o aprendizado de LIBRAS
uma forma mais natural de comunicao de uma pessoa deficiente auditiva, que ajuda
a desenvolver a habilidade espacial do crebro sendo possvel estabelecer uma
relao direta entre o mundo real e sua representao na linguagem de smbolos, o
que no ocorre com a fala, j que no existe o feedback auditivo.
Outra grande dificuldade lingstica que as pessoas surdas apresentam em
relao ao aprendizado do portugus escrito. Pensa-se, freqentemente, que uma
pessoa surda, por no apresentar nenhum problema relacionado viso, no possui
dificuldade alguma em produzir ou compreender um texto escrito. Entretanto fato
conhecido que nas instituies educacionais brasileiras, as dificuldades dos alunos
surdos na aquisio da escrita enorme, sendo a Lngua Portuguesa um desafio para
eles e seus professores.
No caso do surdo brasileiro, o problema que se coloca o seguinte: pelo fato
de ser surdo, ele no adquire a lngua oral, ou seja, o portugus falado de forma
espontnea e, assim, seu desempenho nessa modalidade da lngua portuguesa , em
geral, extremamente precrio. Como as metodologias de ensino e aprendizagem da
2
escrita no Brasil fazem apelo, na maioria dos casos, ao aspecto fnico do idioma
para ensinar as letras do alfabeto grfico e, as palavras geralmente so apresentadas
descontextualizadas e sem nfase no significado, o desempenho do surdo em
portugus escrito, que poderia ser excelente, acaba sendo precrio ou quase nulo [2].
Argumenta-se que o portugus escrito pode ser plenamente adquirido pelo
surdo se a metodologia recorrer, principalmente, a estratgias visuais, essencialmente
LIBRAS, no se enfatizando a relao letra-som, e se essas estratgias forem
similares quelas utilizadas no ensino do segundo idioma ou lngua estrangeira.
Com base nos argumentos apresentados acima e aliados ao fato de que a
LIBRAS fornece todo o aparato lingstico-cognitivo necessrio utilizao de
estratgias de interpretao e produo de textos escritos, prope-se com este projeto,
desenvolver um tipo de interface homem-mquina constituda por uma luva sensoreada
e um software inteligente (operado em um computador) capazes de reconhecer as
letras do alfabeto da LIBRAS feitos por um usurio. Espera-se que este sistema possa
auxiliar deficientes auditivos na aprendizagem da lngua portuguesa escrita e, tambm,
pessoas ouvintes no aprendizado de LIBRAS. Futuramente, caso o projeto se mostre
vivel, existe a possibilidade de incrementar o hardware e software do projeto para que
seja possvel o reconhecimento de gestos mais complexos que representem palavras e
expresses da Lngua Brasileira de Sinais.
3
2 DESCRIO DO PROJETO
A meta do projeto produzir uma luva equipada com sensores resistivos de
curvatura e acelermetros, para que seja possvel mapear a posio da mo de um
usurio e enviar estes dados para um software que capaz de reconhecer os dados
como sinais do alfabeto da LIBRAS. Os parmetros avaliados so a curvatura dos
dedos e sua relao entre si, bem como a posio da mo do usurio em relao ao
solo. Os sensores so instalados na luva com ajuda de velcros costurados na mesma e
nos sensores.
Os sensores so lidos por um microcontrolador e estes dados enviados ao
computador para que seja possvel a anlise dos mesmos. No computador, podem ser
aplicados mtodos estatsticos e/ou de inteligncia artificial para identificao da
posio relativa dos dedos e da mo e, conseqentemente, o reconhecimento de um
possvel sinal do alfabeto da LIBRAS. At o presente momento somente mtodos
estatsticos so usados para reconhecimento.
Pode-se ter uma viso geral do sistema na figura 1.
Figura 1 - Viso geral do sistema
4
3 REVISO BIBLIOGRFICA
3.1 Lnguas de Sinais
As lnguas de sinais apresentam-se numa modalidade diferente das lnguas
orais-auditivas; so lnguas espao-visuais, ou seja, a realizao dessas lnguas no
estabelecida atravs do canal oral-auditivo, mas atravs da viso e da utilizao do
espao. A diferena na modalidade determina o uso de mecanismos sintticos
especficos diferentes dos utilizados nas lnguas orais. As lnguas de sinais so
sistemas lingsticos independentes dos sistemas das lnguas orais e no so
universais.
Pesquisas sobre idiomas de sinais vm mostrando que estes so
comparveis em complexidade e expressividade a quaisquer idiomas orais. Estas
lnguas expressam idias sutis, complexas e abstratas, permitindo que seus usurios
discutam sobre diversos assuntos como filosofia, literatura ou poltica, alm de
esportes, trabalho, moda e a utilizem com funes estticas para fazer poesias,
estrias, teatro e humor [3].
As lnguas de sinais so naturais porque, assim como as lnguas orais,
surgiram espontaneamente da interao entre pessoas e porque devido sua estrutura
permitem a expresso de qualquer conceito - descritivo, emotivo, racional, literal,
metafrico, concreto, abstrato - enfim, permitem a expresso de qualquer significado
decorrente da necessidade comunicativa e expressiva do ser humano.
Por isso so complexas, porque so dotadas de todos os mecanismos
necessrios aos objetivos mencionados, porm, econmicas e lgicas porque servem
para atingir todos esses objetivos de forma rpida e eficiente e at certo ponto de forma
automtica. Isto porque, tratando-se muitas vezes de significados que demandam
operaes complexas que devem ser transmitidas prontamente diante de diferentes
situaes e contextos, seus usurios tero que utilizar os mecanismos estruturais que
elas oferecem de forma apropriada sem ter que pensar e elaborar longamente sobre
como atingir seus objetivos lingsticos.
Como as lnguas de sinais utilizam-se de um meio ou canal visual-espacial e
no oral auditivo, muitas vezes apresentam formas icnicas, isto , formas lingsticas
5
que tentam copiar o referente real em suas caractersticas visuais. Esta iconicidade
mais evidente nas estruturas das lnguas de sinais do que nas orais deve-se ao fato de
que o espao parece ser mais concreto e palpvel do que o tempo, dimenso utilizada
pelas lnguas orais-auditivas quando constituem suas estruturas atravs de seqncias
sonoras que basicamente se transmitem temporalmente.
A LIBRAS natural e dinmica como as lnguas orais-auditivas,
apresentando regras finitas que podem ser usadas para criar um nmero infinito de
expresses e smbolos, de acordo com a necessidade de seus usurios. Considera-se
que a LIBRAS ou deve ser a lngua materna dos surdos no porque a lngua natural
dos surdos, mas sim porque, tendo os surdos bloqueios para a aquisio espontnea
de qualquer lngua natural oral, eles sim que s vo ter acesso a uma lngua materna
que no seja veiculada atravs do canal oral-auditivo.
A LIBRAS a lngua que possibilita aos surdos o desenvolvimento de toda
capacidade lingstica nata de todo o ser humano [3].
3.2 Reconhecimento Computacional de gestos
Desde o surgimento dos primeiros computadores, existe um esforo para
tornar a comunicao homem-mquina cada vez mais natural para os usurios destes
equipamentos. Em todo histrico da Computao, buscou-se facilitar a operao dos
computadores por meio de ferramentas implementadas em software e hardware, de
forma a aumentar a produtividade do uso do computador. Assim, o objetivo principal
que o usurio possa extrair a mxima capacidade do equipamento, preocupando-se o
mnimo com detalhes tcnicos.
Evolues nesta rea da computao mostram-se desafiadoras porque
geralmente demandam que novas formas de interao sejam fceis de ser assimiladas
pelo usurio final e, ao mesmo tempo, mantenham toda a flexibilidade de
funcionamento da mquina. Estes objetivos contrastantes geralmente fazem surgir
solues que exigem processamentos complexos, como por exemplo, o
reconhecimento de imagens.
Na maior parte das pesquisas relacionadas a este fim, procura-se fazer o
reconhecimento do comportamento corporal do usurio. Como exemplo, podemos citar
sistemas que utilizam reconhecimento de imagens, reconhecimento de voz e posies
6
ou movimentos de partes do corpo humano. As reas mais vistosas para
aplicaes destas tcnicas so a Realidade Virtual e Realidade Aumentada, porm, o
campo de aplicaes muito mais amplo.
Como a maioria destas novas interfaces procuram fazer uma anlise do
comportamento do usurio em relao ao espao e/ou tempo, surge a idia e fazer o
reconhecimento computacional de gestos predeterminados. Desta forma, os idiomas de
sinais servem bem a esta abordagem porque so idiomas completos, com regras
muitas vezes complexas, porm, bem determinadas. Vrias pesquisas que visam o
reconhecimento de linguagens de sinais j foram desenvolvidas e outras esto em
andamento. A maioria delas usa como ferramenta o reconhecimento de imagens;
outras usam algum tipo de equipamento ligado ao corpo do usurio. Logicamente, do
ponto de vista do usurio, o reconhecimento de gestos atravs de imagens prefervel
porque implica em um grau de liberdade muito maior aos movimentos corpreos.
Porm, este tipo de tcnica demanda um processamento computacional altamente
complexo porque deve extrair vrias imagens em um pequeno intervalo de tempo e
tambm lidar com variaes nas posies do corpo do usurio [4]. Outras tcnicas
fazem uso de uma luva equipada com diversos sensores [5][6] para mapear a posio
da mo. Neste caso, o desafio produzir uma luva que possa fornecer o maior nmero
possvel de informaes sobre o posicionamento da mo, comprometendo
minimamente a liberdade do usurio.
Para o reconhecimento de gestos ou linguagens de sinais tambm
necessrio um software capaz de obter as informaes do hardware (cmeras e
sensores) e decidir se os dados representam um sinal vlido e qual sinal eles
representam. Para isso, so usadas tcnicas estatsticas e de inteligncia artificial
como redes neurais. Outro componente fundamental para uma anlise consistente dos
dados um banco de dados com informaes sobre os sinais que sero avaliados e
que seja estatisticamente vlido. No caso especfico da LIBRAS, existem esforos para
confeco de um banco de dados padro para este fim [9]. importante observar que
a construo de tal base de dados uma tarefa complicada j que apresenta um
volume de dados grande devido s variaes entre sinais executados por pessoas
diferentes.
O campo de pesquisas na rea da interface homem-mquina oferece
grandes desafios e, ao mesmo tempo, um campo de aplicaes enorme que vai desde
a operao remota de um dispositivo eletrnico at a aplicaes em Engenharia da
Reabilitao e Lingstica, por exemplo.
7
3.3 Medidas de Tendncia Central
A maioria dos conjuntos de dados apresenta uma diferente tendncia de se
agrupar ou concentrar em torno de um ponto central (ou meio do conjunto). Assim
sendo, para um conjunto de dados, em particular, geralmente se torna possvel
selecionar um valor tpico ou representativo para descrever todo o conjunto. Tal valor
descritivo uma medida de localizao ou tendncia central. H diferentes definies
de medidas de tendncia central como, por exemplo, mdia, mediana, moda, ponto
mdio, etc [7].
A medida de tendncia central relevante para este trabalho a mdia
aritmtica (ou simplesmente mdia), que obtida somando-se todos os valores do
conjunto de dados e dividindo-se o total pelo nmero de itens envolvidos. Na
implementao do software de reconhecimento estatstico, a mdia desempenha uma
funo crucial juntamente com uma medida da variao dos dados.
A mdia obtida pela Equao 1, onde n o tamanho da amostra e x
i
a i-
sima observao da varivel aleatria X.
Equao 1 - Mdia Aritmtica
3.4 Medidas de Variao
As medidas de variao so de grande importncia para a estatstica porque
so ferramentas que fornecem meios para avaliao do comportamento dos dados. As
medidas de tendncia central do uma idia sobre o conjunto de dados, mas no so
capazes de fornecer informaes sobre como eles se distribuem. Usando-se alguma
medida de tendncia central em conjunto com uma medida de variao pode-se extrair
este tipo de informao [8].
8
A medida de variao mais importante o Desvio Padro que avalia
como os dados flutuam em torno da mdia. uma medida de variao dos valores em
relao mdia. Assim, nmeros relativamente prximos uns dos outros tm baixo
desvio padro, enquanto nmeros mais dispersos tm maior valor de desvio padro.
O desvio padro ? pode ser calculado pela Equao 2, onde n o tamanho
da amostra, x o valor do dado corrente e X a mdia [7].
Equao 2 - Desvio Padro
3.5 Distribuio Normal
A distribuio normal especialmente importante na estatstica porque
inmeros fenmenos podem ser aproximados por meio dela e tambm porque oferece
base para a inferncia estatstica e processos de deciso que usam o teorema central
do limite [8]. A distribuio normal possui vrias propriedades importantes: apresenta
grfico em forma de sino, suas medidas de tendncia central so todas idnticas e sua
disperso mdia igual a 1,33 desvio padro [7].
Muitos conjuntos de dados apresentam uma distribuio normal ou, pelo
menos, podem ter seus valores aproximados por uma distribuio normal. Assim,
usando os conceitos de mdia e desvio padro em uma distribuio normal, pode-se
criar um sistema de deciso que leve em conta a probabilidade de um determinado
dado pertencer a um conjunto especfico de valores.
Como esta uma distribuio muito usada, foram criados tabelas e mtodos
para facilitar o clculo de probabilidade.
9
3.6 Teorema Central do Limite
O teorema central do limite outro tpico importantssimo no estudo da
estatstica. Este teorema explica que medida que o tamanho de uma amostra de
dados aumenta, a distribuio amostral das mdias amostrais tende para uma
distribuio normal. Em outras palavras, se extramos amostras de mesmo tamanho da
mesma populao, calculamos suas mdias e construmos um histograma dessas
mdias, esse histograma tende para a forma de um sino de uma distribuio normal e a
mdia das mdias amostrais ser a mdia populacional. E isto verdade
independentemente da forma de distribuio da populao original [7].
3.7 Acelermetros Teoria de Operao.
Um acelermetro um transdutor que converte uma acelerao aplicada
sobre ele em uma grandeza eltrica.
O princpio bsico de funcionamento dos acelermetros a lei de Hooke, que
diz que o deslocamento de uma mola proporcional fora aplicada na mesma.
Podemos formalizar esta definio usando a equao de Hooke, onde L o
deslocamento e K uma constante inerente mola (Equao 3).
Equao 3 - Equao de Hooke
Outro princpio fsico envolvido a Segunda Lei de Newton, que relaciona
fora com massa e acelerao atravs da Equao 4.
Equao 4 - Segunda Lei de Newton
10
Igualando as equaes 1 e 2 obtm-se a Equao 5.
Equao 5 - Relao das equaes de Hooke e Newton
Desta maneira, o problema de medir a acelerao, torna-se um problema de
medir o deslocamento de uma massa conhecida.
Os acelermetros existentes no mercado fazem uso de um sistema de
massa e mola diminuto fabricado com a tecnologia de micromquinas de superfcie
(ou MEMS - Micro Electro Mechanical System). Esta tecnologia permite a fabricao de
dispositivos eletromecnicos de dimenses microscpicas [10]. A figura 2 exemplifica o
princpio de funcionamento do acelermetro. Nela pode-se identificar a massa que
deve ser considerada nos clculos da acelerao e, as placas capacitivas fixas e
mvel.
Quando o dispositivo sujeito acelerao, a distncia entre as placas
capacitivas muda. Como a massa do brao mvel conhecida, o deslocamento pode
ser medido verificando-se a capacitncia entre as placas. Como mostrado na equao
5, conhecendo-se o deslocamento do brao mvel, possvel calcular a acelerao
sofrida.
Existem acelermetros de diversos tamanhos e diversas faixas de fora e
acelerao. Para uma noo mais intuitiva de acelerao, os fabricantes especificam a
faixa de operao e resistncia de seus acelermetros em g (fora da gravidade
terrestre - aproximadamente 9,8 m/s
2
).
Figura 2 - Sistema massa-mola
11
3.8 Sensores de curvatura
Sensores de curvatura so sensores especializados na mensurao do
ngulo de deslocamento de algum objeto em relao a outro. Existem vrios tipos de
sensores de curvatura [6]: indutivos, mecnicos, pticos e resistivos. Sensores
resistivos podem usar como materiais principais, borrachas condutivas ou um tipo
especial de tinta condutiva. Estes sensores tm uma resistncia eltrica determinada
que se modifica linearmente (dentro de um limite especificado pelo fabricante)
conforme curvado.
Os sensores de curvatura mais comuns e baratos so os sensores resistivos
e por este motivo sero usados neste trabalho.
12
4 ESPECIFICAO TCNICA
O sistema proposto deve reconhecer as letras do alfabeto da LIBRAS e ter
um acerto de aproximadamente 70%. O reconhecimento abrange somente as letras de
a at z do alfabeto datilolgico mostradas na figura 3. O sistema no faz o
reconhecimento que qualquer outro caracter ou sinal.
4.1 Especificao do Hardware
O hardware envolvido no projeto composto principalmente por dois tipos de
sensores e um microcontrolador com conversor analgico digital embutido.
Os sensores utilizados incluem um acelermetro com dois eixos que ser
usado para anlise da inclinao da mo do usurio bem como seu movimento
horizontal e, um sensor resistivo que indica a curvatura de cada dedo da mo. O
microcontrolador usado para aquisio e envio dos dados provenientes dos sensores
para o computador.
Figura 3 - Alfabeto da LIBRAS
13
4.1.1 Acelermetro ADXL203
O acelermetro utilizado neste projeto foi o ADXL203 fabricado pela Analog
Devices [11]. As principais caractersticas deste dispositivo so listadas abaixo:
??Dois eixos de operao.
??Sensibilidade de 1V/g.
??Resoluo de 1mg.
??Freqncia de operao selecionvel por capacitor externo.
??Faixa de operao de 1,7g.
??Resposta um sinal analgico.
??Circuito interno de condicionamento do sinal.
??Encapsulamento de tamanho reduzido.
Um dos eixos do acelermetro usado para medir a posio da mo do
usurio da luva em relao ao solo e outro eixo para identifcar os padres de
movimento de algumas letras; portanto, a acelerao aplicada sobre ele ser a fora da
gravidade e a acelerao de movimentos da mo que no devero ser grandes. Isso
permite que um acelermetro com uma faixa de operao restrita (1,7g) seja usado.
O ADXL203 possui ainda um circuito interno para o condicionamento do sinal
proveniente das placas capacitivas mostradas na figura 4.
Figura 4 - Circuito interno do ADXL203
14
Analisando o circuito percebemos que as placas fixas so polarizadas
com ondas quadradas em antifase, de modo que a cada ciclo a corrente que percorre o
capacitor muda de sentido. A excitao tem freqncia de 100KHz e de grande
amplitude, o que resulta em baixa sensibilidade a rudo proveniente de dispositivos
eletrnicos.
Se a massa estiver centralizada, ambos os lados do capacitor diferencial tm
capacitncias iguais, e a tenso CA na massa zero. No entanto, se a massa no est
centralizada devido a uma acelerao, o capacitor diferencial torna-se desbalanceado.
A forma de onda da massa uma onda quadrada cuja amplitude proporcional ao
deslocamento e, portanto, acelerao. A fase da tenso da massa em relao
excitao determina a polaridade da acelerao.
A sada da massa conectada a um amplificador no inversor, que amplifica
o sinal de sada de 100KHz.
A sada demodulada em um demodulador sncrono que amostra a sada do
amplificador, uma vez que a tenso neste esteja estabilizada. Uma vez que o
demodulador sincronizado em fase com a excitao, a polaridade do sinal de sada
indica corretamente a polaridade da acelerao aplicada.
Este acelermetro possui tambm um pino de autoteste. Quando este pino
ativado, um sinal conhecido aplicado ao sensor, criando um campo eltrico que fora
um deslocamento do brao mvel. Isto gera um sinal conhecido na sada, que pode ser
monitorado permitindo verificar se o sinal na sada o esperado, testando desta forma
a integridade do acelermetro. A figura 5 apresenta as dimenses do acelermetro
utilizado (em milmetros).
Figura 5 - Encapsulamento do acelermetro
15
4.1.2 Sensor de Curvatura Flex Sensor
Para mapear a posio dos dedos da mo, foram usados sensores de
curvatura fabricados com um tipo de tinta condutiva alocada sobre um substrato
flexvel. Eles foram instalados no dorso de cada dedo da mo.
Quando o sensor no est flexionado, apresenta uma resistncia de
aproximadamente 80K? . medida que se flexiona o sensor, a resistncia aumenta
para aproximadamente 300 K? em 180 de curvatura.
Este tipo de sensor produzido pela empresa Spectra Symbol [12] e seu
nome comercial Flex Sensor. Suas dimenses so explicitadas na figura 6.
Figura 6 - Dimenses do Flex Sensor
16
4.1.3 Microcontrolador
O microcontrolador o elemento responsvel pela aquisio e tratamento
dos dados provenientes dos sensores. Ele tambm faz a comunicao com o
computador atravs de uma interface serial.
Para que o microcontrolador possa manipular os dados dos sensores,
necessrio que estes estejam no formato digital. Para tanto, usado um conversor
analgico-digital.
Com vista na racionalizao do espao necessrio para montagem do
hardware, optou-se pela utilizao de um microcontrolador com conversor A/D
embutido. Este microcontrolador o MSC1211Y5 fabricado pela Texas Instruments
[13]. As principais caractersticas do dispositivo so listadas abaixo:
??Ncleo da famlia 8051.
??Memria flash de 32 KB interna ao chip.
??Memria flash configurvel entre memria de dados e programa.
??Conversor A/D com oito entradas multiplexadas.
??Conversor A/D de at 24 bits (limitados pela taxa de converso).
??Conversor A/D com calibrao automtica de offset e ganho.
??Buffer interno.
??Sensor de temperatura interno.
??Gerador de tenso de referncia interno com preciso de 2%.
??Porta serial padro RS232.
??Tenso de alimentao de 2,7V at 5,25V.
??Programao serial ou paralela.
Um diagrama em blocos da estrutura interna do MSC1211Y5 mostrado na figura 7.
17
Figura 7 - Microcontrolador MSC1211Y5
4.1.4 Transmisso de dados
A transmisso de dados do hardware para o microcomputador se d pela
interface serial ou USB, dependendo unicamente da seleo do usurio.
Para transmisses feitas pela porta USB usado o dispositivo TUSB3410
fabricado pela Texas Instruments que faz a converso de uma transmisso serial para
USB. O fabricante fornece junto com este dispositivo, um driver para ser instalado no
computador. Este driver permite que a porta USB, qual est ligado o TUSB3410, seja
tratada como um simples porta serial.
Com o uso deste componente, possvel disponibilizar uma interface USB
para o usurio, sem as complicaes de um tratamento especial por software e
hardware da interface USB.
4.1.5 Instalao dos sensores na luva
O primeiro prottipo da luva foi confeccionado de lycra para melhor
adaptao mo do usurio. Os sensores so anexados luva com velcros para que
seja possvel remov-los na lavagem da luva.
18
Um esquema do primeiro prottipo da luva mostrado na figura 8.
Figura 8 - Sensores posicionados no dorso da luva
4.2 Especificao do software
O software deste projeto est divido em duas partes: firmware e programa de
anlise. O firmware responsvel pela configurao do microcontrolador, operao do
conversor analgico digital e transmisso dos dados para o computador. O mesmo foi
desenvolvido em linguagem C usando o software ?Keil da empresa ?Vision [14]. (Para
carregar o cdigo do programa no microcontrolador ser usado o software TI
Downloader, fornecido gratuitamente pela Texas Instuments).
O software de anlise tem a funo de estabelecer a comunicao do
computador com o microcontrolador, usando a interface serial RS232 ou USB, manter
uma base de dados que contenha informaes sobre a lngua de sinais, analisar os
dados provenientes dos sensores e decidir se a configurao dos dedos da mo
representa algum sinal vlido do alfabeto de LIBRAS. O software foi escrito na
linguagem C++, com a ferramenta C++ Builder 6.0 da Borland. O banco de dados o
Paradox. A figura 9 um diagrama em alto nvel dos mdulos do software.
19
O uso do software simples. A interface com o usurio de forma
grfica no sendo necessrios conhecimentos tcnicos avanados para oper-lo. Um
usurio que saiba operar um computador no encontrar grandes problemas na
operao do software aps um pequeno treinamento ou leitura do manual do sistema.
Figura 9 Diagrama em blocos do software
20
5 VALIDAO DO PROJETO
O funcionamento do sistema foi avaliado em testes usando todos os valores
do banco de dados coletados dos usurios. Depois de implementada a classe de
reconhecimento e a gerao de relatrios todos os valores do banco de dados foram
processados na classe de reconhecimento e os resultados anotados para posterior
gerao do relatrio.
O relatrio exibe todas as entradas do banco de dados e o reconhecimento
feito pelo software para cada entrada. Como o banco de dados pode conter muitas
entradas, este esquema de representao pode se tornar insignificante. Por isso, no
final do arquivo mostrada uma representao percentual dos resultados. So exibidos
o resultado total de erros e os erros individuais para cada letra. Assim possvel
verificar o funcionamento do sistema como um todo e as letras crticas para o
reconhecimento, podendo-se verificar quais posies da mo o sistema tem mais
dificuldade para identificar.
21
6 CRONOGRAMA DO PROJETO
Dezembro/04:
?? Pesquisas sobre LIBRAS e componentes de hardware.
?? Levantamento do alfabeto de sinais.
?? Conversa com especialistas em LIBRAS.
Janeiro/05:
?? Estudos sobre o funcionamento do microcontrolador.
?? Estudo da arquitetura interna.
?? Estudo do processo de gravao.
?? Confeco da placa de circuito impresso.
?? Montagem do circuito em proto-board.
Fevereiro/05:
?? Desenvolvimento de cdigos de testes para o microcontrolador.
?? Desenvolvimento de cdigos para operao do conversor A/D.
?? Desenvolvimento de cdigos para operao da porta serial.
?? Programao de rotinas em C++ para leitura da porta serial do PC.
Maro/05:
?? Testes com os sensores de curvatura e projeto da disposio dos sensores na
luva.
?? Desenvolvimento de um protocolo para comunicao entre microcontrolador e o
microcomputador.
Abril/05:
?? Aquisio da luva, instalao dos sensores e interligao do microcontrolador
com os sensores e o PC.
Maio/05:
?? Estudos de tcnicas de software.
?? Estudar quais tcnicas de software se adequam melhor ao reconhecimento dos
dados.
Junho/05:
?? Projeto do software.
?? Levantamento de requisitos.
?? Diagramas.
22
?? Documentao geral do software.
Julho/05:
?? Incio da implementao do software e construo da base de dados.
Agosto/05:
?? Desenvolvimento do Software.
Setembro/05:
?? Realizao dos testes.
?? Levantamento estatstico dos resultados obtidos.
Outubro/05:
?? Documentao das concluses e resultados finais.
Novembro/05:
?? Elaborao do manual tcnico e do usurio.
?? Elaborao do artigo cientfico.
?? Reviso da monografia.
23
7 ESTUDO DE VIABILIDADE ECONMICA
Tabela 1 - Estudo de Viabilidade Econmica
Componentes Quantidade Preo Total (R$) *
MSC1211Y5 1 US$ 20,95 57,61
TLC084 2 US$ 1,05 5,77
ADXL203 1 US$ 12,00 33,00
Flex Sensor 7 US$ 10,00 192,50
Par de Luvas de Lycra 1 R$ 20,00 20,00
TUSB3410 1 US$ 2,50 6,87
Componentes eletrnicos (resistores,
capacitores, cristais, fios, solda, etc).
x R$ 30,00 30,00
Cabo USB 1 R$ 10,00 10,00
Cabo Serial 1 R$ 10,00 10,00
MAX232 1 US$ 0,50 1,37
UCC283-5 1 US$ 0,50 1,37
* Dlar cotado em R$ 2,75 368,49
Obs: No computado o custo da mo de obra.
24
8 PROJETO DE HARDWARE
O hardware envolvido no projeto tem a funo de transformar os movimentos
feitos pela mo de um usurio em sinais eltricos que possam ser tratados, convertidos
para sinais digitais e enviados ao computador para anlise do software.
Para um melhor entendimento do funcionamento desta parte do projeto,
divide-se a explicao do hardware em sensores, microcontrolador e transmisso de
dados. Os diagramas esquemticos completos de cada parte esto em anexo, bem
como a lista de componentes usados Anexo A.4. O Anexo A.1 mostras as conexes
dos sensores; o Anexo A.2, as ligaes do microcontrolador e a ltima folha, Anexo A.3
exibe as ligaes dos drivers de comunicao.
8.1 Sensores de Curvatura
Aps a instalao de todos os sensores de curvatura na luva, foram feitos
testes com cada um destes para levantar com preciso qual o valor de resistncia
mxima e mnima que apresentavam de acordo com a flexo a que eram submetidos.
Verificou-se que em repouso (curvatura de 0) os sensores tinham uma resistncia de
aproximadamente 80K? ; quando totalmente curvados (mo completamente fechada),
apresentavam uma resistncia por volta de 300K? .
A ligao dos sensores de curvatura foi feita por meio de um divisor de
tenso. Com esta configurao, os valores de tenso mnimos e mximos que atuaro
sobre os sensores de curvatura so de 1,023V e 2,5V, respectivamente. A variao de
tenso diretamente proporcional ao valor da resistncia do Flex Sensor.
8.2 Acelermetro
Os eixos do acelermetro apresentam internamente um resistor de 32K?
ligado a sua sada, permitindo que sejam implementados filtros passa baixa (com
valores de corte definido pelo projetista) apenas com a ligao de um capacitor
externo. Este filtro pode ser usado para limitar a banda de resposta do acelermetro.
25
Para o eixo que ser usado como inclinmetro a banda de resposta pode ser
reduzida porque a inteno medir a posio da mo e reconhecer se esta se
encontra na posio correta para execuo dos sinais. No caso especfico das letras da
LIBRAS, o movimento vertical da mo no usado com freqncia e no ser repetido
por mais de uma vez a cada segundo. Para o eixo horizontal Y, necessrio uma
resposta mais precisa e rpida j que movimentos neste eixo so de grande
importncia para o reconhecimento correto do sinal. Para algumas letras a
configurao da mo idntica, o nico parmetro variante o movimento horizontal, o
que justifica uma maior banda passante.
8.3 Buffer de Tenso
Para ligar os sensores com o conversor analgico digital do microcontrolador
foi usado um buffer de tenso feito com um amplificador operacional unipolar (TLC084).
Este buffer foi usado apenas para garantir que as entradas do conversor analgico
digital no interferissem nas medidas de tenso sobre os sensores. Os principais
parmetros observados na escolha do amplificador foram: resposta em freqncia (10
MHz), alimentao unipolar, resistncia de entrada (1 T? ), slew-rate (16 V/?s), corrente
eltrica mxima de sada (1,9 mA) e CMRR (110 dB).
8.4 Microcontrolador
No Anexo A.2, o esquema de ligao do microcontrolador MSC1211Y5
mostrado. Para cada pino de alimentao digital foi ligado um capacitor cermico de
100nF em paralelo com o pino. Estes capacitores foram usados para filtrar possveis
variaes na alimentao, o que poderia influenciar na execuo do firmware ou at
mesmo danificar o dispositivo.
Este microcontrolador possui dois modos de operao: modo de
programao e modo de execuo. A escolha entre estes dois modos feita pelo
estado lgico aplicado aos pinos PSEN e ALE. Se forem aplicados nestes pinos nvel
lgico baixo e alto respectivamente, aps um reset o dispositivo entrar em modo de
programao e estar pronto para gravar o cdigo de programa na memria flash.
26
Caso o nvel lgico nestes pinos seja aberto, o dispositivo entrar em modo de
execuo aps o reset.
8.5 Transmisso Serial
Para transmisso serial dos dados entre o microcontrolador e o computador
necessrio adequar as tenses de trabalho entre ambos, j que a porta serial do
computador trabalha com tenses de +8V e -8V e o microcontrolador com 0V e 5V.
Para este fim foi usado o circuito integrado MAX232 da Texas Instruments.
8.6 Transmisso USB
Para transmisso dos dados via porta USB foi usado o conversor TUSB3410
da Texas Instruments. Este dispositivo composto por um microcontrolador da famlia
8052 que especializado na converso de dados seriais para o padro de
comunicao USB. Ser usada a verso 1.1 da USB com velocidade de 1,5 Mb/s.
Como este circuito integrado opera com tenso de 3,3V e a alimentao foi
feita pelo prprio barramento USB (5V), foi usado o regulador UCC283-3 fabricado pela
Texas Instruments.
Quando conectado ao computador, o dispositivo reconhecido como TI USB
e usa um driver especfico fornecido pelo fabricante.
8.7 Buffer de Comunicao
Como foram usados dois padres (serial e USB) para transmisso dos
dados, foi necessrio isolar os dispositivos de converso (MAX232 e TUSB3410) para
que a operao de um no interfira na operao do outro. Para isso foi usado o buffer
74LS244 em conjunto com dois transistores BC548 operando como portas inversoras.
Quando o circuito estiver ligado porta USB do computador, a alimentao
de 5V do barramento USB estar ativa. Isso far com que os transistores enviem os
27
sinais lgicos de controle adequados para o buffer, que ativar a parte da
comunicao USB e colocar as sadas realtivas ao MAX232 em tri-state. Quando no
houver alimentao de 5V do barramento USB, o buffer habilitar as suas sadas para
o driver MAX232, colocando as sadas relativas ao TUSB3410 em tri-state, liberando a
comunicao serial. Desse modo, a seleo da forma de comunicao do hardware
com o computador se dar de forma automtica, liberando o usurio desta
responsabilidade.
8.8 Circuito de Alimentao
A alimentao de todo o hardware feita atravs de uma fonte estabilizada
que fornea tenses contnuas entre 7V e 9V. Esta tenso limitada em 5V pelo
regulador UCC283-5 da Texas Instruments. Este regulador foi escolhido porque
apresenta uma regulagem de alta preciso.
8.9 Sinais de Conexo
As tabelas 1, 2 e 3 apresentam uma descrio dos sinais que fazem a
interligao das diferentes folhas do diagrama esquemtico. Os sinais que interligam
diferentes folhas tm o mesmo nome nas duas folhas.
28
Tabela 2 - Sinais do Anexo A.1 (Sensores e Interfaceamento)
Sinal Tipo Descrio Ligado com
AIN0 Sada Tenso dos sensores Anexo 2
AIN1 Sada Tenso dos sensores Anexo 2
AIN2 Sada Tenso dos sensores Anexo 2
AIN3 Sada Tenso dos sensores Anexo 2
AIN4 Sada Tenso dos sensores Anexo 2
AIN5 Sada Tenso dos sensores Anexo 2
AIN6 Sada Tenso dos sensores Anexo 2
Tabela 3 - Sinais do Anexo A.2 (Transmisso de dados)
Sinal Tipo Descrio Ligado com
RX_uC Sada Dados de sada da Porta serial Anexo 3
TX_uC Entrada Dados de entrada da Porta
Serial
Anexo 3
Tabela 4 - Sinais do Anexo A.3 (Microncontrolador)
Sinal Tipo Descrio Ligado com
AIN0 Entrada Entrada do conversor A/D Anexo 1
AIN1 Entrada Entrada do conversor A/D Anexo 1
AIN2 Entrada Entrada do conversor A/D Anexo 1
AIN3 Entrada Entrada do conversor A/D Anexo 1
AIN4 Entrada Entrada do conversor A/D Anexo 1
AIN5 Entrada Entrada do conversor A/D Anexo 1
AIN6 Entrada Entrada do conversor A/D Anexo 1
RX_uC Entrada Dados de entrada da Porta
serial
Anexo 2
TX_uC Sada Dados de sada da Porta Serial Anexo 2
29
9 PROJETO DE SOFTWARE
A parte de software deste projeto abrange o firmware, que faz a configurao
e operao do microcontrolador, o software de cadastro das letras e o software de
anlise, que contm os algoritmos para reconhecimento dos sinais.
O software de cadastro das letras foi separado do software de anlise devido
ao fato de que a operao de cadastros de letras e usurios pode comprometer todo o
banco de dados e, conseqentemente, todo o reconhecimento do sistema. Desta
forma, a operao de cadastro deve ser supervisionada por uma pessoa que tenha um
maior conhecimento sobre o sistema e que tambm conhea a LIBRAS. Assim, pode-
se disponibilizar o software de reconhecimento para usurios leigos e o software de
manipulao dos dados quando houver um conhecimento do sistema mais
aprofundado por parte do usurio.
9.1 Firmware
O programa que opera no microcontrolador inicia seu funcionamento
configurando todos os perifricos que sero usados. Primeiramente, feita a
configurao da porta serial para uma velocidade de transmisso e recepo de
115200 bps. Aps a configurao da porta serial, o conversor analgico digital
configurado. A taxa de converso configurada para 200 Hz (o que permite dados com
uma largura de at 24 bits) e escolhida a tenso de referncia interna de 2,5V.
Geralmente, a tenso de referncia interna escolhida porque o MSC1211Y5 possui
um gerador de referncia de alta preciso e estabilidade. Depois de configurado o
conversor analgico digital, feita uma calibrao automtica do conversor para anular
as tenses de offset de entrada e escolher um ganho adequado para o amplificador
interno. Depois disso, a interrupo da porta serial habilitada e o programa entra em
um lao infinito aguardando por um comando do computador.
Quando algum comando recebido do computador, a tarefa requisitada
executada e o programa coloca novamente o microcontrolador em espera por um novo
comando. O programa do microcontrolador est preparado para receber os seguintes
comandos: incio de converso dos dados dos sensores, envio de dados dos sensores,
30
e calibrao do conversor A/D. Este ltimo comando necessrio porque alguns
minutos depois do incio da operao do microcontrolador a temperatura deste
dispositivo muda, fato que pode interferir na correta leitura dos sensores.
Nas prximas sees so apresentados o fluxograma do firmware e o seu
diagrama de estados.
9.1.1 Fluxograma
t Transmisso, c Converso, a Calibrao.
Figura 10 - Fluxograma do Firmware
31
9.1.2 Diagrama de Estados
Figura 11 - Diagrama de estados do Firmware
9.2 Software de Cadastro
O software de cadastro tem a funo principal de cadastrar usurios do
sistema e as informaes sobre os caracteres do alfabeto da LIBRAS. Para o cadastro
dos caracteres o software estabelece automaticamente a comunicao com o hardware
e mostra os dados dos sensores em tempo real usando a interface grfica. A letra que
dever ser repetida pelo usurio da luva durante o cadastro aparece em uma foto no
meio da tela do programa. Quando o usurio tiver feito o sinal correto daquela letra, os
dados dos sensores so armazenados no banco de dados.
9.3 Software de Anlise
O software de anlise executado em um computador e tem a funo de
estabelecer a comunicao com o hardware, comandar o funcionamento do
microcontrolador, analisar os dados recebidos com base em um banco de dados que
contm informaes sobre os caracteres da LIBRAS.
32
A conexo com o hardware feita de forma automtica. Quando receber
o comando do usurio para conectar-se ao hardware, o programa avaliar quais portas
seriais esto disponveis para uso e tentar estabelecer comunicao com todas para
descobrir em qual delas est conectada a luva. Quando a comunicao for
estabelecida, a anlise dos dados iniciada.
Nas prximas sees so mostrados os diagramas dos principais mdulos
do software.
9.3.1 Anlise Estatstica
A anlise dos sinais feita usando os dados individuais de cada usurio ou
os dados de todos os usurios do sistema.
No incio da execuo da anlise, os dados sero lidos do banco de dados e
transferidos para a memria do computador. Estes dados so compostos pela mdia
dos valores dos sensores para cada letra do alfabeto e seu desvio padro. Com as
informaes da mdia e desvio padro pode-se, com o teorema central do limite,
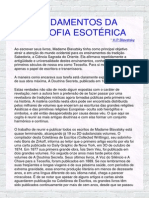
decidir se um dado sinal um caracter vlido da LIBRAS. O grfico apresentado na
figura 12 pode auxiliar no entendimento deste processo. Este grfico foi levantado com
valores reais do sistema e corresponde s medidas do dedo polegar para a letra a.
Pelo grfico, podemos perceber que os dados esto dispostos em uma
distribuio normal de probabilidade. O eixo Y mostra os valores lidos do sensor
instalado sobre o polegar e o eixo X contm estes mesmos valores porm,
padronizados para que fosse possvel usar as tabelas de clculo da rea sob a curva.
Foram usadas 30 amostras do sensor para que a disposio do grfico fosse
visivelmente normal [7].
A mdia dos valores de aproximadamente 1,64 e o desvio padro 0,0387.
Um intervalo de dois desvios padro foi criado para a rea de deciso. Este intervalo
delimitado pelas retas verticais de 0,9 e 0,9. Atravs destes valores padronizados e
das tabelas de clculo de rea, verifica-se que a rea sob este intervalo corresponde a
63% da rea total, ou seja, levando em considerao este conjunto de dados, podemos
afirmar que uma amostra selecionada aleatoriamente tem 63% de chance de estar
localizada dentro deste intervalo definido.
33
O algoritmo de reconhecimento usa este mesmo princpio para todas as
letras. Cada letra formada por sete sinais diferentes que possuem seus respectivos
valores de mdia e desvio padro. Para cada conjunto de dados (sete nmeros
correspondentes a cada sensor) lidos da luva, feita uma avaliao para verificar em
qual letra cada dedo se encaixa de acordo com sua posio.
Figura 12 - Grfico de Distribuio dos Valores do Polegar para a Letra A
34
9.4 Diagramas de Casos de Uso
Figura 13 - Diagrama de Casos de Uso do Software de Cadastro
Figura 14 - Diagrama de Casos de Uso do Software de Reconhecimento
35
9.5 Diagrama de Classes
Figura 15 - Diagrama de Classes do Software de Cadastro
36
Figura 16 - Diagrama de Classes do Software de Reconhecimento
37
9.6 Diagramas de Seqncia do Software de Cadastro
Figura 17 - Seqncia de Incio do Software de Cadastro
38
Figura 18 - Seqncia de Incluso Software de Cadastro
39
Figura 19 - Seqncia de Alterao Software de Cadastro
40
Figura 20 - Sequncia de Excluso Software de Cadastro
41
9.7 Diagramas de seqncia do Software de Reconhecimento
Figura 21 - Seqncia de Exibio dos Sensores Software de Reconhecimento
42
Figura 22 - Seqncia Anlise dos Dados Software de Reconhecimento
43
9.8 Modelo Entidade Relacionamento
Figura 23 - MER
9.9 Dicionrio de Dados
Tabela 5 - Dicionrio de Dados
Tabela Campo Tipo Descrio
Codigo Auto Incremento Chave Primria Usurio
Nome String Nome do usurio
Letra Caracter Chave Primria
M_Polegar Real Mdia da curvatura
do dedo polegar
Amostras
S_Polegar Real Desvio padro da
curvatura o polegar
44
9.10 Prottipos de Tela
Figura 24 Tela de Cadastro
Figura 25 - Tela Principal
45
10 RESULTADOS
A colocao dos sensores na luva foi feita de forma artesanal atravs de
velcros costurados na mesma e nos sensores. A luva apresentou um funcionamento
satisfatrio apesar de sua fragilidade e problemas com desprendimento dos sensores
que geralmente no so percebidos de imediato pelo usurio e conseqentemente
afetam o funcionamento do sistema.
Os sensores apresentaram um bom desempenho no tendo sido notados
qualquer alterao do funcionamento dos mesmos em relao ao uso e fadiga do
material.
O hardware se mostrou eficiente na leitura dos sensores e na transmisso
dos dados para o computador. O conversor analgico digital foi configurado para uma
taxa de amostragem de 200Hz e a transmisso serial ajustada para 115200 bps. Isto
possibilitou que fossem lidos oito vezes todos os sete sensores durante um segundo.
O software de reconhecimento usou como base a anlise estatstica, mais
especificamente os conceitos de mdia, desvio padro, distribuio normal e o teorema
central do limite. Durante os testes verificou-se empiricamente que o reconhecimento
apresentava melhor desempenho quando o intervalo de deciso era aumentado
somando-se uma constante ao desvio padro. Para os testes, todas as amostras de
letras presentes no banco de dados foram submetidas classe de reconhecimento. No
total foram analisados 780 registros, ou seja, 30 amostras para cada uma das 26 letras.
Durante o teste foram anotados todas as entradas de dados na classe de
reconhecimento e o resultado indicado pela classe. A partir da comparao destes
dados foi gerado um relatrio com os valores percentuais dos erros de reconhecimento.
Considerando o nmero total de erros para todo o banco de dados, obteve-se uma taxa
de acerto de 85%.
Os resultados total e de cada letra so mostrados na tabela 6.
46
Tabela 6 - Resultados do Reconhecimento
LETRA ERRO (%) LETRA ERRO (%)
A 3 N 20
B 0 O 10
C 10 P 16
D 6 Q 10
E 6 R 13
F 10 S 13
G 3 T 40
H 6 U 50
I 10 V 86
J 16 W 10
K 0 X 16
L 13 Y 0
M 6 Z 26
47
11 CONCLUSO
De acordo com a proposta de funcionamento apresentada, o sistema de
reconhecimento mostrou um desempenho superior ao esperado. Apesar de a
colocao dos sensores na luva ter sido feita de forma artesanal, esta se mostrou
estvel a despeito da fadiga do material durante todo o desenvolvimento e teste do
projeto. Em relao ao conforto e grau de liberdade do usurio da luva verificou-se que
melhorias ainda devem ser feitas a fim aumentar o tempo de tolerncia de uso da luva,
j que, os velcros podem machucar a mo do usurio (principalmente as articulaes)
em um longo perodo de uso. Durante novos desenvolvimentos desse sistema
possvel que se chegue concluso que outras modificaes precisem ser feitas na
luva ou na colocao dos sensores, porm, s ser possvel afirmar isto com o
desenvolvimento de novas tcnicas de reconhecimento.
Analisando os erros do software, vemos que estes se concentram nas letras
mais semelhantes e principalmente nas letras que so diferenciadas apenas pela
abertura relativa dos dedos, sugerindo a melhoria do sistema de reconhecimento tanto
por hardware como por software.
Como novas tcnicas de reconhecimento provavelmente exigiro a aquisio
de um grande conjunto de dados, fica claro que a confeco da luva deve ser
melhorada com o objetivo de deix-la mais resistente ao esforo e conseqentemente
mais confivel durante todo este processo. Tambm podem ser feitas melhorias em
relao ao aumento do nmero de sensores (tanto de curvatura como de movimentos)
com o objetivo de refinar o reconhecimento da posio da mo do usurio em relao
ao espao e ao seu corpo.
O hardware de aquisio se mostrou eficaz tanto para converso dos dados
de natureza analgica para digital como para a transmisso desses dados para o
computador, sendo provavelmente o mdulo do sistema que menos sofrer alteraes
em possveis melhorias que venham a ser desenvolvidas. Uma das melhorias que
poder causar modificaes no hardware a adio de novos sensores na luva,
fazendo com que o microcontrolador tenha que ser trocado ou as entradas do seu
conversor analgico-digital multiplexadas devido ao fato de s existirem oito entradas
disponveis. Dependendo do nmero de sensores e componentes adicionados ser
tambm necessrio fazer novos testes para aferio da velocidade do sistema de
48
aquisio para verificar se a alterao no compromete o desempenho do sistema
como um todo.
Em relao ao reconhecimento estatstico implementado em software foi
visto que este oferece um bom desempenho comparado ao esforo computacional e a
relativa facilidade de implementao. Apesar disso, ainda um esquema muito simples
e pouco robusto para esta aplicao. Provavelmente, a estatstica possa ser aplicada
com uma eficincia muito maior quando usada em conjunto com outros algoritmos que
usem redes neurais ou lgica fuzzy, por exemplo.
Outro problema detectado durante os testes do sistema foi a impossibilidade
de reconhecimento do momento da troca entre dois sinais. A troca de sinais um
evento crtico para um reconhecimento mais refinado dos caracteres e tambm, devido
s variaes produzidas nos sensores durante esses momentos, uma fonte de erros
para o software de reconhecimento. Tentou-se corrigir este problema regulando a
temporizao de leitura dos sensores, porm o resultado foi insatisfatrio. Ainda na
tentativa de verificar este evento no sistema, foi feita uma anlise dos sinais dos
sensores no domnio da freqncia, o que tambm no gerou bons resultados devido
baixa freqncia de variao destes.
Tambm ser de grande ajuda a implementao de funes secundrias
para a continuao do desenvolvimento do software. Tais funes teriam a
responsabilidade de gerar relatrios, grficos e outras formas de auxlio anlise do
desenvolvedor devido a grande quantidade de dados que deve ser analisada e
interpretada.
Finalmente, em conversa com profissionais especializados no ensino da
LIBRAS a pessoas surdas, conclui-se que o sistema em questo pode auxiliar na
educao de deficientes auditivos se fizer reconhecimento de gestos mais complexos
como palavras e expresses completas e tambm atuar como um elemento motivador
no processo educacional dos surdos.
99
14 GLOSSRIO
Dactilolgico Alfabeto em que as letras so representadas por sinais
manuais.
Você também pode gostar
- Terapia Cognitivo-Comportamental Na Dependência QuímicaDocumento134 páginasTerapia Cognitivo-Comportamental Na Dependência QuímicaMarinaAinda não há avaliações
- AVALIAÇÃO DA LINGUAGEM ORAL - ManualDocumento15 páginasAVALIAÇÃO DA LINGUAGEM ORAL - Manualallexa72608390% (10)
- Lista Livros CACDDocumento6 páginasLista Livros CACDMatheus Gleydson0% (1)
- AdinkraDocumento25 páginasAdinkraWilker SolidadeAinda não há avaliações
- Fundamentos Da Filosofia Esoterica - BlavatskyDocumento34 páginasFundamentos Da Filosofia Esoterica - Blavatskymarcelo_vpfAinda não há avaliações
- Apostila Redacao EnemDocumento32 páginasApostila Redacao EnemLeonardoAinda não há avaliações
- Ser Bom Aluno, Bora LáDocumento30 páginasSer Bom Aluno, Bora LáEla MildredAinda não há avaliações
- 04 Cap 2 Orientacao Espacial Terra Sol PDFDocumento12 páginas04 Cap 2 Orientacao Espacial Terra Sol PDFtecorreaAinda não há avaliações
- T 20 DermatoglifosDocumento12 páginasT 20 DermatoglifostecorreaAinda não há avaliações
- T 20 DermatoglifosDocumento12 páginasT 20 DermatoglifostecorreaAinda não há avaliações
- Tabela Codigo de Municipio Do IBGEDocumento1 páginaTabela Codigo de Municipio Do IBGEtecorreaAinda não há avaliações
- Resolucao 40 2012 Politica DescentralizacaoDocumento5 páginasResolucao 40 2012 Politica DescentralizacaoLuis BembeleAinda não há avaliações
- Modernismo 1 e 2 FaseDocumento4 páginasModernismo 1 e 2 Faseadelmocandido100% (3)
- A Destreza Das Armas Da Espanha A PortugDocumento19 páginasA Destreza Das Armas Da Espanha A PortugAnonymous VoqqV0AOeAinda não há avaliações
- Meteorologistas e Profetas Da ChuvaDocumento23 páginasMeteorologistas e Profetas Da ChuvaRenzoTaddeiAinda não há avaliações
- 1teste 1per 9BDocumento8 páginas1teste 1per 9BAna Raquel SilvaAinda não há avaliações
- Resumos para o Teste de PsicologiaDocumento11 páginasResumos para o Teste de PsicologiaCátia ColaçoAinda não há avaliações
- Cronograma - Henrique Lobel - PDF - 231227 - 113203Documento111 páginasCronograma - Henrique Lobel - PDF - 231227 - 113203luizhenriqueramos02Ainda não há avaliações
- Cinemática Dos Fluidos - emDocumento31 páginasCinemática Dos Fluidos - emDiego Lima CunhaAinda não há avaliações
- O Que Significa Ser Um Sacrifício VivoDocumento4 páginasO Que Significa Ser Um Sacrifício VivoMaria Aparecida CostaAinda não há avaliações
- Cristianismo e CulturaDocumento5 páginasCristianismo e CulturaRodrigoBorgesAinda não há avaliações
- As 7 Atitudes Do FermentoDocumento2 páginasAs 7 Atitudes Do FermentoRev. Samuel Couto FeitosaAinda não há avaliações
- Teste LiteraturaDocumento7 páginasTeste LiteraturaMatheus Silva Dos SantosAinda não há avaliações
- Edital Verticalizado SEEDF PDFDocumento3 páginasEdital Verticalizado SEEDF PDFHamilton Francisco de SouzaAinda não há avaliações
- Exercício EstratificaçãoDocumento4 páginasExercício EstratificaçãoÁlvaro BotelhoAinda não há avaliações
- Filosofia PolíticaDocumento97 páginasFilosofia Políticajeronimo juniorAinda não há avaliações
- 1º Ano - Queda LivreDocumento13 páginas1º Ano - Queda LivreDouglasAinda não há avaliações
- 1 LIVRO Torna - Se Negro Neusa SantosDocumento4 páginas1 LIVRO Torna - Se Negro Neusa SantosDeborah AlvesAinda não há avaliações
- PM Mind MapDocumento13 páginasPM Mind MapJONHNNAinda não há avaliações
- Tres Tecnicas para Ativar A Criatividade PDFDocumento12 páginasTres Tecnicas para Ativar A Criatividade PDFTeresinhaBrandãoAinda não há avaliações
- Proposta de Redação - Padrões de Beleza Estabelecidos Prejudicam o Indivíduo ContemporâneoDocumento1 páginaProposta de Redação - Padrões de Beleza Estabelecidos Prejudicam o Indivíduo Contemporâneobela206031Ainda não há avaliações
- NBR 05465 ABNT TB 19-16 - Eletrotecnica e Eletronica - Reles Eletricos PDFDocumento21 páginasNBR 05465 ABNT TB 19-16 - Eletrotecnica e Eletronica - Reles Eletricos PDFVanderlei CardosoAinda não há avaliações
- Agente de Correios 2Documento18 páginasAgente de Correios 2Camila LagoAinda não há avaliações
- ICONICIDADE E MARCAÇÃO RascunhoDocumento6 páginasICONICIDADE E MARCAÇÃO RascunhoVinicius OliveiraAinda não há avaliações