Você também pode gostar
- TCC - Coordenaçao e SeletividadeDocumento77 páginasTCC - Coordenaçao e SeletividadeRodrigo de SousaAinda não há avaliações
- DEF 1L6632100000BPTPT01P - tcm290 820183Documento95 páginasDEF 1L6632100000BPTPT01P - tcm290 820183D'há Santos RaúlAinda não há avaliações
- TCC - Felipe - Preve - CópiaDocumento137 páginasTCC - Felipe - Preve - CópiaD'há Santos RaúlAinda não há avaliações
- 339m Dissertacao Mestrado Luiz Mariano Junior PpgeeDocumento125 páginas339m Dissertacao Mestrado Luiz Mariano Junior PpgeeD'há Santos RaúlAinda não há avaliações
- 201514-201544 PDFDocumento1 página201514-201544 PDFD'há Santos RaúlAinda não há avaliações
- Deslocamento de NeutroDocumento9 páginasDeslocamento de NeutroLucas MarinhoAinda não há avaliações
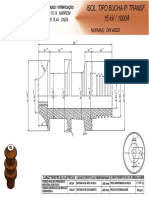
- Normas:: 20.36.12 - MARROM 20.36.42 - CINZADocumento1 páginaNormas:: 20.36.12 - MARROM 20.36.42 - CINZAD'há Santos RaúlAinda não há avaliações
- ManualDocumento52 páginasManualLuiz Gustavo Câmara100% (3)
- $sinais e SistemasDocumento1 página$sinais e SistemasD'há Santos RaúlAinda não há avaliações
- Electricidade de Manutencao Industrial - CV 5 - ANEP PDFDocumento76 páginasElectricidade de Manutencao Industrial - CV 5 - ANEP PDFD'há Santos RaúlAinda não há avaliações
- 80Documento269 páginas80andrel0100% (1)
- Ramalho Camila Eles TCCDocumento64 páginasRamalho Camila Eles TCCWalter BernardoAinda não há avaliações
- Ramalho Camila Eles TCCDocumento64 páginasRamalho Camila Eles TCCWalter BernardoAinda não há avaliações
- SEL - 311C Função de Distância PDFDocumento122 páginasSEL - 311C Função de Distância PDFJhonatan TerraAinda não há avaliações
- Curso Energia Solar FotovoltaicaDocumento40 páginasCurso Energia Solar FotovoltaicaD'há Santos RaúlAinda não há avaliações
- 80Documento269 páginas80andrel0100% (1)
- Confiabilidade Humana EstudoDocumento122 páginasConfiabilidade Humana EstudoAnonymous LIderT7Ainda não há avaliações
- Bioconstrucao Energia - SolarDocumento35 páginasBioconstrucao Energia - Solarapi-3721797Ainda não há avaliações
- SamaraDeCavalcantePaiva DISSERT PDFDocumento114 páginasSamaraDeCavalcantePaiva DISSERT PDFD'há Santos RaúlAinda não há avaliações
- GUARINI, Priscilla de CastroDocumento101 páginasGUARINI, Priscilla de CastroD'há Santos RaúlAinda não há avaliações
- Dissertaà à o de Mestrado de José SousaDocumento206 páginasDissertaà à o de Mestrado de José SousaAnonymous Q779D7z25iAinda não há avaliações
- TFreire PDFDocumento17 páginasTFreire PDFD'há Santos RaúlAinda não há avaliações
- Recursos Energéticos, Meio Ambiente e Recursos NaturaisDocumento22 páginasRecursos Energéticos, Meio Ambiente e Recursos NaturaisFrancislleyAinda não há avaliações
- Bo 00039696 2021Documento3 páginasBo 00039696 2021Favio Alexander GomezAinda não há avaliações
- Uma Visão Sobre A Proteção de Terra Residual em Sistemas Elétricos IndustriaisDocumento11 páginasUma Visão Sobre A Proteção de Terra Residual em Sistemas Elétricos IndustriaisFilipe Barcelos ResendeAinda não há avaliações
- Check List - Registro de Candidatura - CandidatosDocumento3 páginasCheck List - Registro de Candidatura - CandidatosKeimenson NascimentoAinda não há avaliações
- Catalogo - Produtos Ganja MarketDocumento29 páginasCatalogo - Produtos Ganja MarketbadiadesuAinda não há avaliações
- Aula 3 Alcanos Perfil de Rotação EnergiaDocumento47 páginasAula 3 Alcanos Perfil de Rotação EnergiajujulibrasAinda não há avaliações
- Contrato de Trabalho - Cuidadora de CriançasDocumento2 páginasContrato de Trabalho - Cuidadora de CriançasFernando aparecido DevecchiAinda não há avaliações
- Funcoes em Fisica e No Cotidiano AndreDocumento27 páginasFuncoes em Fisica e No Cotidiano AndrethomasedAinda não há avaliações
- Cifra Club - Bruno e Marrone - InevitávelDocumento4 páginasCifra Club - Bruno e Marrone - InevitávelRafael GoulartAinda não há avaliações
- Plano de Gerenciamento Das AquisicoesDocumento9 páginasPlano de Gerenciamento Das AquisicoesStela MariscoAinda não há avaliações
- Etapas MonografiaDocumento32 páginasEtapas MonografiaJosé José JoséAinda não há avaliações
- Apostila PintorDocumento17 páginasApostila PintorPaulo Ricardo Weimann100% (1)
- Formulario RenachDocumento1 páginaFormulario RenachFernanda MariaAinda não há avaliações
- Fórmulas Mecânica ClássicaDocumento12 páginasFórmulas Mecânica Clássicapaulo henriqueAinda não há avaliações
- Desvendando o DockerDocumento36 páginasDesvendando o DockerlutitusAinda não há avaliações
- Conceitos de Filial de Compartilhamentos de ArquivosDocumento5 páginasConceitos de Filial de Compartilhamentos de ArquivosRoberto Amâncio TeixeiraAinda não há avaliações
- Livro 2Documento14 páginasLivro 2c2fgpfcrv9Ainda não há avaliações
- Coriolis Quickstart PT-BR SampleDocumento10 páginasCoriolis Quickstart PT-BR SampleansuztradAinda não há avaliações
- In90 2021Documento6 páginasIn90 2021Gênesis Ribeiro LeiteAinda não há avaliações
- Aula de Redação - Escola Professora Isaura de FrançaDocumento5 páginasAula de Redação - Escola Professora Isaura de FrançaElayne PinheiroAinda não há avaliações
- Marketing Na LogisticaDocumento2 páginasMarketing Na LogisticaLetícia Débora SilveiraAinda não há avaliações
- Correções Alternativas À Sidak & BonferroniDocumento35 páginasCorreções Alternativas À Sidak & BonferroniLucasAinda não há avaliações
- Arruelas para Assento de Bicos Injetores: Berimex Injeção Diesel Ltda. Metalúrgica Estamparia LICCO LtdaDocumento1 páginaArruelas para Assento de Bicos Injetores: Berimex Injeção Diesel Ltda. Metalúrgica Estamparia LICCO LtdaRosivaldo da Silva SantosAinda não há avaliações
- NR17 - Treinamento - Ergonomia - 2022Documento45 páginasNR17 - Treinamento - Ergonomia - 2022evanilAinda não há avaliações
- Memorial DescritivoDocumento2 páginasMemorial DescritivoVega StrangeAinda não há avaliações
- Aet - NR17Documento14 páginasAet - NR17Alexandro CostaAinda não há avaliações
- Gestão de AtivosDocumento22 páginasGestão de AtivosMauricio Gonçalves FernandesAinda não há avaliações
- Ebook Graficos de ControleDocumento16 páginasEbook Graficos de ControlepablojorgesilvaAinda não há avaliações
- Briefing para Gerenciamento de Redes SociaisDocumento2 páginasBriefing para Gerenciamento de Redes SociaisElisa MedeirosAinda não há avaliações
- Plano de Aula NataçãoDocumento4 páginasPlano de Aula NataçãoJanaína Maia de Almeida100% (4)
- Tecido EpietlialDocumento1 páginaTecido EpietlialMarcelo VeigaAinda não há avaliações
- Matemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalNo EverandMatemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalAinda não há avaliações
- Introdução Às Redes De Computadores: Modelos Osi E Tcp/ipNo EverandIntrodução Às Redes De Computadores: Modelos Osi E Tcp/ipAinda não há avaliações
- A matemática nos anos iniciais do ensino fundamental: Tecendo fios do ensinar e do aprenderNo EverandA matemática nos anos iniciais do ensino fundamental: Tecendo fios do ensinar e do aprenderNota: 4.5 de 5 estrelas4.5/5 (5)
- Sincronicidade e entrelaçamento quântico. Campos de força. Não-localidade. Percepções extra-sensoriais. As surpreendentes propriedades da física quântica.No EverandSincronicidade e entrelaçamento quântico. Campos de força. Não-localidade. Percepções extra-sensoriais. As surpreendentes propriedades da física quântica.Nota: 5 de 5 estrelas5/5 (5)
- Segurança Da Informação DescomplicadaNo EverandSegurança Da Informação DescomplicadaAinda não há avaliações
- Raciocínio lógico e matemática para concursos: Manual completoNo EverandRaciocínio lógico e matemática para concursos: Manual completoNota: 5 de 5 estrelas5/5 (1)