Você também pode gostar
- Atividades Sobre o Livro Viagem Ao Centro Da TerraDocumento4 páginasAtividades Sobre o Livro Viagem Ao Centro Da TerraDiane Régis100% (2)
- Atlas de Anatomia DentalDocumento44 páginasAtlas de Anatomia DentalRadmilo Soares100% (7)
- Modelo de Contrato de Manutençao ArDocumento12 páginasModelo de Contrato de Manutençao ArJosé Luiz Bellato JuniorAinda não há avaliações
- Prova 2 de Gest de Projetos e ProcessosDocumento8 páginasProva 2 de Gest de Projetos e ProcessosedsonAinda não há avaliações
- 7o Ano - Exercício - Números Positivos e Negativos - Aula 02Documento3 páginas7o Ano - Exercício - Números Positivos e Negativos - Aula 02Andreza Marques0% (1)
- Slide 3Documento21 páginasSlide 3Andre MauricioAinda não há avaliações
- Leonel FinalDocumento15 páginasLeonel Finalgaudencio afonsoAinda não há avaliações
- PesquisaDocumento23 páginasPesquisaJaja JajajAinda não há avaliações
- PEF3405-Aula 3-Fundações RasasDocumento12 páginasPEF3405-Aula 3-Fundações RasasVinicius CalácioAinda não há avaliações
- Lei SP Caraguatatuba 2.654 - 23 D.ODocumento3 páginasLei SP Caraguatatuba 2.654 - 23 D.Oflags_brAinda não há avaliações
- Tabelas Verdade ApontDocumento2 páginasTabelas Verdade ApontIris CostaAinda não há avaliações
- Dctimarinst 30 17 PDFDocumento5 páginasDctimarinst 30 17 PDFRafael CaveariAinda não há avaliações
- A Química Da Cor Da Cerveja 3Documento8 páginasA Química Da Cor Da Cerveja 3Angélica OliveiraAinda não há avaliações
- Teoria Dos Conjuntos Rodrigo Sanchez MacedoDocumento115 páginasTeoria Dos Conjuntos Rodrigo Sanchez MacedofranciscoAinda não há avaliações
- Atividade MIPsDocumento3 páginasAtividade MIPsNeto CarlosAinda não há avaliações
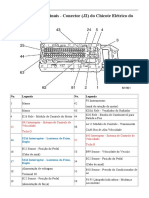
- Designação de Terminais J2 ECU e CCDocumento2 páginasDesignação de Terminais J2 ECU e CCJuan M. LopezAinda não há avaliações
- Camila Barbosa Riccardi LeonDocumento124 páginasCamila Barbosa Riccardi LeonManuella BragaAinda não há avaliações
- Resumo - Elementos de Probabilidades e EstatísticaDocumento30 páginasResumo - Elementos de Probabilidades e EstatísticaAndré CastroAinda não há avaliações
- Resenha Critica Saude Do TrabalhadorDocumento3 páginasResenha Critica Saude Do TrabalhadorJúniorBarbosaAinda não há avaliações
- NOTA TÉCNICA GRECS-GGTES Nº 01-2018Documento16 páginasNOTA TÉCNICA GRECS-GGTES Nº 01-2018Mariana GonçalvesAinda não há avaliações
- Capoeira e Saude MentalDocumento15 páginasCapoeira e Saude MentalLucas CruzAinda não há avaliações
- Relação Final de Classificados Pós Recurso No Processo de Credenciamento PEI 2023 - LIBRAS PEIDocumento3 páginasRelação Final de Classificados Pós Recurso No Processo de Credenciamento PEI 2023 - LIBRAS PEIThalita FernandesAinda não há avaliações
- Apostila EspectrofotometriaDocumento21 páginasApostila EspectrofotometriaVenancio Rabissone MissomaliAinda não há avaliações
- Modelo de Anamnese Personal TrainerDocumento2 páginasModelo de Anamnese Personal TrainerSamuel JuniorAinda não há avaliações
- Port - 118 - 97 Criadouro Fins Comerciais para Venda de FilhotesDocumento9 páginasPort - 118 - 97 Criadouro Fins Comerciais para Venda de FilhotesWilson Victório GarciaAinda não há avaliações
- Edital de Abertura 52021 - PropepUFALDocumento10 páginasEdital de Abertura 52021 - PropepUFALVitória FirmianoAinda não há avaliações
- MAPA (História Da Igreja I)Documento5 páginasMAPA (História Da Igreja I)Sidnei SousaAinda não há avaliações
- Simulador Ganho Primeiro Pedido BR FinalDocumento2 páginasSimulador Ganho Primeiro Pedido BR FinalJuninho PaivaAinda não há avaliações
- 2018 Apostila Revisao-EnEMDocumento130 páginas2018 Apostila Revisao-EnEMLeticia Campos ArrudaAinda não há avaliações
- Mediação e Conciliação Na Justiça Do TrabalhoDocumento6 páginasMediação e Conciliação Na Justiça Do TrabalhoEdvaldo NascimentoAinda não há avaliações