Escolar Documentos
Profissional Documentos
Cultura Documentos
2 Capitulo PDF
Enviado por
LeonardoTabosaTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
2 Capitulo PDF
Enviado por
LeonardoTabosaDireitos autorais:
Formatos disponíveis
CAPTULO 2
SISTEMA DE CONVERSO DE
ENERGIA ELICA
Neste captulo, sero descritos os principais componentes de um sistema de
converso de energia elica (SCEE) e o controle do conversor do lado da mquina (CLM) e
do conversor do lado da rede (CLR). Para o controle dos conversores utilizou-se a tcnica de
controle vetorial orientado pelo campo, que proporciona o controle da potncia ativa e reativa
de forma independente. Ser apresentada tambm a topologia de controle clssico para o
gerador de induo duplamente alimentado (DFIG) e a linearizao dos sistemas dinmicos
atravs da expanso em srie de Taylor em torno de um ponto de operao, resultando em um
modelo linearizado completo para o DFIG.
2.1 SISTEMA DE CONVERSO DE ENERGIA ELICA
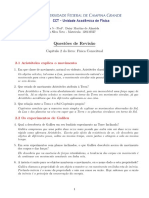
O sistema de converso de energia elica apresentado na Figura 2.1 composto por
um gerador de induo duplamente alimentado, uma turbina elica, uma rede eltrica
trifsica, um conversor ca-cc-ca (formado pelo CLM e CLR e pelo barramento CC), pelos
indutores do filtro trifsicos L
f
, e pelos indutores L
g
. Os indutores L
g
representam de forma
simplificada as caractersticas da rede e do transformador no ponto de conexo comum (PCC)
da rede eltrica com o gerador elico.
g
L
f
L
Figura 2.1- SCEE com o DFIG.
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
21
O gerador acoplado turbina elica a partir de uma caixa de engrenagens (Gear
Box), com os terminais do estator conectados diretamente rede eltrica trifsica enquanto o
rotor conectado ao conversor do lado da mquina. O conversor ca-cc-ca formado por dois
conversores estticos interligados atravs de um barramento CC.
Para o acionamento do DFIG existem duas concepes normalmente utilizadas: a
primeira, conhecida como acionamento Kramer Esttico apresentada na Figura 2.2. O
circuito simples, porm limitado, pois trabalha somente no modo super-sncrono para
gerador, pois o fluxo de potncia do circuito rotrico unidirecional. Desta forma, este
acionamento no apropriado para aplicaes em sistemas de gerao elica (MARQUES,
2004).
Figura 2.2 - Configurao do DFIG com acionamento Kramer Esttico.
A segunda configurao conhecida como acionamento Scherbius Esttico (BOSE,
2001), (MARQUES, 2004) mostrada na Figura 2.3. Onde ocorre a substituio dos
retificadores a diodo em ponte e dos inversores a tiristor, por conversores constitudos por
IGBT. Permitindo o fluxo bidirecional de potncia no circuito rotrico, podendo trabalhar nas
velocidades sub-sncrona, sncrona e super-sncrona.
Os dois conversores interligados atravs de um barramento CC na topologia back-
to-back tm como funo fazer com que a dinmica do sistema elico seja independente da
rede. conhecido tambm como inversor fonte de tenso (VSI) de forma que o capacitor pode
ser visto pelos dois conversores como uma fonte de tenso contnua (OLIVEIRA, 2009).
A configurao Scherbius Esttico foi a escolhida para o desenvolvimento do
referido trabalho. Essa topologia permite o fluxo de potncia bidirecional, sendo amplamente
aplicado em sistemas elicos.
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
22
C
Figura 2.3- Configurao do DFIG com acionamento Scherbius- Esttico.
2. 2 MODELO DA TURBINA ELICA
Uma turbina elica capta uma parte da energia cintica do vento que passa atravs da
rea varrida pelas ps que aciona o eixo do gerador e o mesmo transforma em energia eltrica.
A potncia mecnica funo do cubo da velocidade do vento e pode ser calculada segundo a
equao (2.1) (SLOOTWEG, 2003):
3
1
( , )
2
m p w p
P A V C = ,
(2.1)
sendo a densidade do ar (kg/m
3
),
w
V a velocidade do vento (m/s), A
p
a rea varrida
pelas ps da turbina (m
2
) , o ngulo de passo pitch angle e (C
p
) o coeficiente de
potncia, que corresponde ao rendimento aerodinmico da turbina.
As curvas que relacionam ( , )
p
C so obtidas experimentalmente e fornecidas
pelo fabricante da turbina elica atravs de testes realizados em tneis de vento e podem ser
obtidas segundo o modelo matemtico bastante utilizado na literatura (SLOOTWEG, 2003):
5
2
1 3 4 6
( , )
i
C
p
i
C
C C C C e C
| |
= +
|
\
,
(2.2)
sendo que C
1
=0,5176, C
2
=116, C
3
=0,4, C
4
=5, C
5
=21 e C
6
=0,0068 so constantes de uma
turbina especfica como a que foi apresentada por (SLOOTWEG, 2003) que so relacionadas
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
23
com o projeto aerodinmico da turbina e
i
um parmetro dado pela equao abaixo
(SLOOTWEG , 2003):
3
1 1 0, 035
0, 08 1
i
=
+ +
.
(2.3)
A potncia desenvolvida pela turbina elica depende da velocidade do vento e da
velocidade angular de rotao do eixo. Um fator adimensional bastante utilizado a relao
entre a velocidade tangencial na ponta da p (m/s) e a velocidade do vento (m/s), representado
por uma razo de velocidade (), sendo dada por:
tg r p
w w
v R
V V
= = ,
(2.4)
onde
tg
v a velocidade tangencial na ponta da p (m/s),
r
a velocidade do rotor (rad/s) e
p
R o raio do rotor elico medido na ponta da p (m).
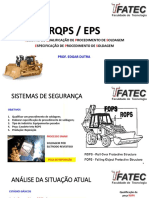
A Figura 2.4 apresenta o comportamento de Cp para diversos valores do ngulo de
passo em funo da razo de velocidade () utilizando o modelo matemtico dado pelas
equaes (2.2) e (2.3). Observa-se que medida que aumenta o ngulo , diminui o
coeficiente de potncia e conseqentemente a potncia eltrica gerada pela turbina.
Figura 2.4 Coeficiente de potncia em funo de .
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
24
Observa-se tambm que existe um valor da razo de velocidade () para o qual o coeficiente
de potncia mximo (C
p
timo), para cada .
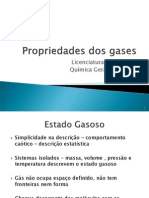
A Figura 2.5 mostra a trajetria de mxima potncia de uma turbina elica genrica
para vrias velocidades do vento. A curva de mxima potncia (MPPT-Maximun Power Point
Tracking) tem o objetivo de manter a turbina operando no ponto timo. Os algoritmos do
MPPT esto fora do escopo deste trabalho, sendo maiores detalhes obtidos em
(KOUTROULIS; KALAITZAKIS, 2006), (VOLTOLINI, 2007) e (BAZZO, 2007).
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
0
2
4
6
8
10
12
14
16
18
3
V
2
V
1
V
4
V
n
V
1
P
2
P
n
P
1
2
K
n
3
P
4
P
Figura 2.5 - Trajetria de mxima potncia.
O torque mecnico da turbina elica a razo da potncia mecnica em relao
velocidade do eixo
r
, dado por:
m
m
r
p
T
= .
(2.5)
A relao que define o coeficiente de conjugado (C
q
) com o coeficiente de potncia
(C
p
) e a razo de velocidade dada por:
( , ) ( , )
p q
C C = .
(2.6)
Desta forma, o torque mecnico produzido pela turbina em funo do coeficiente de
conjugado pode ser expresso pela seguinte equao:
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
25
3 2
1
( , )
2
m p w q
T R V C = .
(2.7)
Adotando-se o modelo tradicional de massa nica ou massa global lumped mass, o
acoplamento mecnico entre a turbina elica e o gerador pode ser representado pela seguinte
equao (AKHMATOV, 2003):
1
( )
2
m
m e t m
T
d
T T D
dt H
= ,
(2.8)
sendo T
e
o conjugado eletromagntico desenvolvido pela mquina em (N.m), T
m
o conjugado
mecnico aplicado no eixo do rotor em (N.m),
m
a velocidade mecnica da mquina em
(rad/s) e D
t
a constante de amortecimento do sistema concentrado no eixo do gerador.
A constante de inrcia total concentrada do sistema elico a soma da constante de
inrcia da turbina e a constante de inrcia do rotor do gerador como pode ser evidenciado pela
seguinte equao (AKHMATOV, 2003):
T t G
H H H = + ,
(2.9)
sendo , e
T t G
H H H as constantes de inrcia total concentrada, da turbina e do gerador,
respectivamente.
De acordo com (SLOOTWEG, 2003) e (VIEIRA, 2009), o modelo de massa nica
representa adequadamente o sistema do eixo mecnico de aerogeradores que trabalham com
velocidade varivel como no caso do DFIG, pois o comportamento do eixo da turbina
raramente refletido na rede eltrica devido ao controle do conversor do lado da mquina que
permite o controle das potncias ativa e reativa de forma independente. Porm, em uma
turbina que utiliza aerogeradores de velocidade fixa, o sistema de eixo mecnico melhor
representado pelo modelo de duas massas (SALMAN ; TEO, 2003) ,(VIEIRA, 2009).
2.3 GERADOR DE INDUO DUPLAMENTE ALIMENTADO
O gerador de induo com dupla alimentao uma mquina de induo com o rotor
bobinado, onde o estator conectado diretamente rede eltrica e o rotor alimentado atravs
de dois conversores back-to-back . Esta configurao permite mquina trabalhar nas
velocidades sub-sncrona, sncrona e super-sncrona.
O princpio de funcionamento do DFIG pode ser visualizado atravs da Figura 2.6.
Admitindo-se o sentido positivo para o consumo de energia e negativo para o fornecimento,
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
26
observa-se que a potncia eltrica fornecida pelo gerador rede pode ser transferida atravs
do estator e simultaneamente fornecida ou consumida pelo rotor atravs de um conversor de
potncia bidirecional.
Dessa forma, possvel gerar energia para a rede, com a mquina trabalhando
abaixo, acima e, inclusive, na velocidade sncrona (HANSEN et al., 2003).
DFIG
CA
CC
CC
CA
CLM CLR
Sub-sncrona Super- sncrona
0
r
P > 0
r
P <
Circuito do rotor
Sub-sncrona Super- sncrona
0
s
P <
Circuito do estator
r
P
m
P
0
s
P <
s
P
Rede
eltrica
Caixa de
engranagem
Figura 2.6 - O princpio de funcionamento do DFIG.
O escorregamento dado por:
s r
s
s
= ,
(2.10)
sendo
s
a velocidade sncrona e
r
a velocidade do rotor.
Quando a mquina encontra-se na regio sub-sncrona, ou seja, quando a velocidade
do rotor menor que a velocidade sncrona da mquina, o escorregamento positivo (s > 0) e
quando a mquina encontra-se na regio super-sncrona, ou seja, quando a velocidade do rotor
maior que a velocidade sncrona da mquina o escorregamento negativo (s < 0).
Desprezando-se as perdas e considerando a mquina em regime permanente, a
potncia total gerada e entregue para a rede dada por:
T s r
P P P = + .
(2.11)
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
27
As relaes entre as potncias mecnica, do rotor e do estator, desprezando-se as perdas so
(HANSEN et al., 2003) e (SALLES, 2009):
r s
P sP = ,
(2.12)
( ) 1
m s
P P s = .
(2.13)
Desta forma, possvel verificar que quando o DFIG encontra-se na velocidade
super-sncrona (s < 0), que convencionalmente caracterizaria a operao como gerador em
uma mquina de rotor em gaiola, a potncia ser fornecida rede simultaneamente pelo rotor
atravs dos conversores e pelo estator conforme Figura 2.6. Deste modo (P
r
< 0) indica o
fornecimento de potncia ativa para a rede. Mas, quando a mquina encontra-se na velocidade
sub-sncrona (s > 0), caracterizaria a operao como motor em uma mquina de rotor em
gaiola, o fluxo da potncia ser da rede para o rotor. Desta forma (P
r
> 0) indica que o rotor
consome potncia ativa da rede. Em ambos os casos (velocidade super-sncrona e sub-
sncrona) o estator fornece potncia ativa rede eltrica (HANSEN et al., 2003), (BOLDEA,
2006) e (OLIVEIRA, 2009)
2.3.1 MODELAGEM DO DFIG
Com o intuito de se obter um modelo matemtico para representar o gerador de
induo duplamente alimentado, sero feitas algumas consideraes normalmente utilizadas
(KRAUSE, 1995): os enrolamentos do estator e rotor so idnticos e esto defasados de 120;
o entreferro considerado constante; o circuito magntico considerado ideal, no existe
saturao; a distribuio da densidade de fluxo magntico no entreferro radial e senoidal;
no sero consideradas as perdas magnticas e mecnicas.
As equaes que descrevem as tenses do estator e rotor para a mquina de induo
duplamente alimentada podem ser representadas pelas equaes (2.14-2.19) (KRAUSE, 1995)
e (CHEE-MUN, 1998):
1
1 1
s
s s s
d
v R i
dt
= + ,
(2.14)
2
2 2
s
s s s
d
v R i
dt
= + ,
(2.15)
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
28
3
3 3
s
s s s
d
v R i
dt
= + ,
(2.16)
1
1 1
r
r r r
d
v R i
dt
= + ,
(2.17)
2
2 2
r
r r r
d
v R i
dt
= + ,
(2.18)
3
3 3
r
r r r
d
v R i
dt
= + .
(2.19)
As equaes da tenso do estator e do rotor representadas pelas equaes (2.14-2.19)
podem ser transformadas para um sistema em coordenadas dq (d o eixo direto e q o eixo
em quadratura), que no referencial sncrono podem ser escritas como (BOSE, 2001):
ds
ds s ds s qs
d
v R i
dt
= + ,
(2.20)
qs
qs s qs s ds
d
v R i
dt
= + + ,
(2.21)
dr
dr r dr sl qr
d
v R i
dt
= + ,
(2.22)
qr
qr r qr sl dr
d
v R i
dt
= + + .
(2.23)
Onde
sl
a frequncia angular de escorregamento, apresentada em (2.24):
= =
sl
sl s r
d
dt
.
(2.24)
As equaes dos fluxos magnticos do estator e rotor no referencial sncrono podem
ser escritas em funo das indutncias e correntes do rotor e estator e representadas segundo
as equaes (2.25.-2.28):
ds s ds m dr
L i L i = + ,
(2.25)
qs s qs m qr
L i L i = + ,
(2.26)
dr r dr m ds
L i L i = + ,
(2.27)
qr r qr m qs
L i L i = + .
(2.28)
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
29
sendo
s ls m
L L L = + e
r lr m
L L L = + .
Substituindo (2.25) em (2.20) e (2.26) em (2.21) obtm-se:
( )
ds ds
ds s ds s qs ls m ds dr
di di
v R i L L i i
dt dt
= + + + ,
(2.29)
( )
qs
ds
qs s qs s ds ls m qs qr
di
di
v R i L L i i
dt dt
= + + + + .
(2.30)
Substituindo (2.27) e (2.24) em (2.22) e (2.28) e (2.24) em (2.23) obtm-se:
( )
( )
dr ds
dr s ds s r qr ls m dr ds
di di
v R i L L i i
dt dt
= + + + ,
(2.31)
( )
( )
qr
ds
qr s ds s r dr ls m qr qs
di
di
v R i L L i i
dt dt
= + + + + .
(2.32)
As equaes (2.29-2.32) representam o circuito equivalente para a mquina de
induo duplamente alimentada nos eixos dq, conforme mostrado nas Figuras 2.7(a) e (b)
(BOSE, 2001).
qs
v
s
R ls
L
qr
v
qs
i
r
R
lr
L
qr
i
ds
v
s
R
ls
L
dr
v
r
R
lr
L
dr
i ds
i
s qs
( )
s r qr
s ds
( )
s r dr
m
L
m
L
qs
qr
ds
dr
( ) a
( ) b
Figura 2.7 - Circuito equivalente da mquina de induo duplamente alimentada. (a) eixo q.(b) eixo d.
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
30
2.4. O PRICPIO DO CONTROLE VETORIAL
A estratgia de Controle Vetorial a forma utilizada para conseguir que o controle
da mquina de induo se comporte como se fosse uma mquina de corrente contnua
(NOVOTNY; LIPO, 1996) e (BOSE, 2001).
O conceito de orientao de fluxo consiste em fixar no eixo direto, em um sistema de
coordenadas sncronas, um dos trs fluxos magnticos da mquina: o do estator, o do rotor e
do entreferro. De forma prtica, o que se busca com Controle Vetorial desacoplar os eixos
direto e de quadratura.
Como exemplo, pode ser utilizado orientao do fluxo do rotor em um referencial
de coordenadas dq, o eixo direto d alinhado com o vetor fluxo do rotor, conforme Figura
2.8. A componente do vetor fluxo do rotor no eixo em quadratura q nula ( 0)
qr
= e o fluxo
do eixo direto prprio fluxo do rotor (BIM, 2009).
d
q
r
r
r dr
=
0
qr
=
Referencial sncrono
Coordenadas estacionrias
Figura 2.8-Disposio do vetor de fluxo do rotor orientado com eixo dq.
2.4.1 CONTROLE DO CONVERSOR DO LADO DA MQUINA
Para o controle do conversor do lado da mquina, utilizou-se o controle vetorial
orientado pelo campo a partir do uxo do estator, cujo diagrama vetorial das variveis da
mquina de induo e os ngulos utilizados no controle esto mostrados conforme Figura 2.9.
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
31
a
d
a
q
a
a
V
b
V
c
V
r
d
r
q
r
a
ds s
=
0
a
qs
=
Figura 2.9 - Orientao pelo fluxo de estator.
No diagrama vetorial o eixo direto do estator d
a
com freqncia de rotao do vetor do
fluxo estatrico
a
, faz um ngulo
a
com o sistema de eixos estacionrios fixos no estator
( , ) . O eixo direto do rotor d
r
com freqncia de rotao do rotor
r
est fazendo um ngulo
r
com o mesmo sistema de eixos fixos no estator.
O eixo d
a
alinhado com o eixo do referencial do fluxo do estator
s
de tal forma que
a componente do vetor fluxo do estator no eixo em quadratura nula e o fluxo do eixo direto
o prprio fluxo do estator, ou seja:
0
a
ds s
a
qs
,
(2.33)
onde o sobrescrito a representa o referencial do uxo do estator.
As tenses no estator
ds
v e
qs
v explicitadas nas equaes (2.20) e (2.21) podem ser
obtidas desprezando-se a resistncia do estator ( 0
s
R ), o que pode ser considerado uma
aproximao aceitvel (PENA et al., 1996), (SLOOTWEG, 2003) e (BOLDEA, 2006).
Os transitrios do estator representados pelos termos das derivadas do fluxo do
estator podem ser desprezados, ou seja, (AKHMATOV, 2003), (SLOOTWEG, 2003) e
(ALMEIDA et AL., 2004):
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
32
0
a
a
qs
ds
d
d
dt dt
= = .
(2.34)
Substituindo as equaes (2.33) e (2.34) em (2.20) e (2.21), encontra-se (PENA et al., 1996),
(HOLDSWORTH, et al., 2003) , (SLOOTWEG, 2003) e (BOLDEA, 2006):
0
a
ds
v = ,
(2.35)
s
a a
qs ds
v = .
(2.36)
Das equaes (2.25) e (2.26) chega-se s equaes (2.37) e (2.38), que representam as
correntes do estator nos eixos direto e quadratura na referncia do estator, respectivamente.
a
a
s m dr
ds
s
L i
i
L
= ,
(2.37)
a
m qr a
qs
s
L i
i
L
= .
(2.38)
Substituindo-se as equaes (2.37) e (2.38) em (2.27), obtm-se:
2
a a
m m
dr r dr s
s s
L L
L i
L L
| |
= +
|
\
.
(2.39)
Substituindo-se as equaes (2.33) e (2.38) em (2.28), obtm-se:
2
a a
m
qr r qr
s
L
L i
L
| |
=
|
\
.
(2.40)
Substituindo-se as equaes (2.40) e (2.34) em (2.22) obtm-se:
2 2
a
a a a
m m dr
dr r dr sl r qr r
s s
L L di
v R i L i L
L L dt
| | | |
= +
| |
\ \
,
(2.41)
2 2
1 1
a
a a a
m m dr
dr r dr sl r qr r
r s r s
L L di
v R i L i L
L L L L dt
| | | |
= +
| |
\ \
.
(2.42)
Substituindo-se a equaes (2.39) e (2.44) em (2.23) obtm-se:
2 2
,
a
qr a a a
m m m
qr r qr sl r dr s r
s s s
di
L L L
v R i L i L
L L L dt
( | | | |
= + + +
( | |
\ \
(2.43)
2 2
1 1
a
qr a a a m m m
qr r qr sl r dr sl s r
r s s r s
di
L L L
v R i L i L
L L L L L dt
| | | | | |
= + + +
| | |
| |
\ \ \
.
(2.44)
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
33
O fator de disperso da mquina dado:
2
1
m
r s
L
L L
| |
=
|
|
\
.
(2.45)
Substituindo a equao (2.45) nas equaes (2.42) e (2.44), obtm-se as equaes que
representam as tenses nos eixos direto e de quadratura do rotor no referencial do fluxo do
estator, ou seja:
a
a a a
dr
dr r dr sl r qr r
di
v R i L i L
dt
= + ,
(2.46)
a
qr a a a
m
qr r qr sl r dr sl s r
s
di
L
v R i L i L
L dt
| |
= + + +
|
\
.
(2.47)
As equaes (2.46) e (2.47) sero utilizadas para o projeto da malha interna das correntes
do rotor. Porm, observa-se que existe um acoplamento entre as malhas de correntes. A
corrente
a
dr
i interfere na referncia de tenso do rotor do eixo q e a corrente
a
qr
i interfere na
referncia de tenso do eixo d. Como o acoplamento entre as malhas das correntes do rotor
proporcional ao escorregamento, que pode chegar a 30% para o DFIG ento comum
compens-las por sinais diretos (
drcomp
v e
qrcomp
v ) nas sadas dos controladores das correntes
para garantir um melhor desacoplamento dos controles das correntes
a
dr
i e
a
qr
i (DA SILVA,
2006).
Para o projeto da malhas internas de corrente pode-se definir:
'
a
a
dr
dr r dr r
di
v R i L
dt
= + ,
(2.48)
'
a
qr a
qr r qr r
di
v R i L
dt
= + .
(2.49)
As tenses de referncia do rotor
* a
dr
v
* a
qr
v que acionam o conversor do lado da mquina
podem ser escritas como:
* ' a a
dr dr sl r qr
v v L i = ,
(2.50)
* '
a a
m
qr qr sl r dr sl s
s
L
v v L i
L
| |
= + +
|
\
,
(2.51)
onde os termos de compensao so dados por:
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
34
a
drcomp sl r qr
v L i = ,
(2.52)
a
m
qrcomp sl r dr sl s
s
L
v L i
L
| |
= +
|
\
.
(2.53)
Aplicando a transformada de Laplace em (2.52) e (2.53) obtm-se as funes de transferncia
das malhas de correntes do rotor representadas por (DA SILVA, 2006):
'
1
( ) ( )
dr dr
r r
I s V s
s L R
=
+
,
(2.54)
'
1
( ) ( )
qr qr
r r
I s V s
s L R
=
+
.
(2.55)
A Figura 2.10 mostra os esquemas de desacoplamento do DFIG nos eixos direto e de
quadratura (LIMA, 2009). Observa-se que os termos de compensao so utilizados para
garantir um desacoplamento entre as malhas de controle.
+
a
sl r qr
L i
a
m
sl r dr sl s
s
L
L i
L
| |
+
|
\
1
r r
L s R +
a
dr
i
+
+
1
r r
L s R +
a
qr
i
* a
dr
v
* a
qr
v
a
qr
v
a
dr
v
Figura 2.10 Desacoplamento das correntes do rotor
a
dr
i e
a
qr
i .
2.4.2 O CONJUGADO ELETROMAGNTICO
O conjugado eletromagntico da mquina dado por:
3
( )
2 2
e ds qs qs ds
p
T i i
| |
=
|
\
,
(2.56)
sendo p o nmero de pares de plos da mquina.
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
35
Da equao (2.33) o fluxo magntico do estator no eixo de quadratura nulo, ou seja,
0
a
qs
= , desta forma substituindo (2.33) e (2.38) em (2.56) resulta na seguinte equao:
3
2 2
a
m
e s qr
s
p L
T i
L
| |
=
|
\
.
(2.57)
De acordo com equao (2.57), possvel observar que o conjugado eltrico uma
funo diretamente proporcional componente do eixo em quadratura da corrente do rotor
a
qr
i .
2.4.3 AS POTNCIAS ATIVA E REATIVA
Desprezando-se as perdas de potncia associadas com as resistncias do estator, as
potncias ativa e reativa no estator, podem ser calculadas por (QIAO, 2008):
( )
3
2
s ds ds qs qs
P v i v i = + ,
(2.58)
( )
3
2
s qs ds ds qs
Q v i v i =
.
(2.59)
Como j foi mencionado anteriormente, na equao (2.34) os termos das derivadas
do fluxo do estator foram desprezados
0
a
a
qs
ds
d
d
dt dt
| |
= = |
|
\
. J nas equaes (2.35) e (2.36)
foram desprezadas as resistncias do estator ( 0
s
R ). Alinhado o eixo d com eixo do
referencial do fluxo estatrico,ou seja,
a
ds s
= e 0
a
qs
= e realizando as substituies,
resulta em : 0
a
ds
v = e
s
a a
qs ds
v = . Logo considerando-se este fato e as equaes (2.37) e
(2.38) em (2.58-2.59), tem-se:
s
3
2
a
m s
s qr
s
L
P i
L
= ,
(2.60)
2
s s
3 3
2 2
a
s s m
s dr
s s
L
Q i
L L
= .
(2.61)
De acordo com as equaes (2.60) e (2.61), pode-se observar que a potncia ativa
diretamente proporcional componente do eixo em quadratura da corrente do rotor
a
qr
i e a
potncia reativa componente do eixo direto da corrente do rotor
a
dr
i .
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
36
2.5 O CONVERSOR DO LADO DA REDE
O circuito da Figura 2.11 representa um conversor com comutao forada
conectado rede. A corrente do barramento CC do conversor do lado da mquina denotada
por i
cm
e a corrente do barramento CC do conversor ligado rede por i
cg
e o capacitor do
barramento CC chamado de C
c
. As tenses trifsicas so representadas por e
g1
, e
g2
e e
g3
, v
g1
,
v
g2
e v
g3
so as componentes fundamentais das tenses obtidas no terminal do conversor
ligado rede, i
g1
, i
g2
e i
g3
so as correntes na rede eltrica, i
s1
, i
s2
e i
s3
so as correntes do
estator e if
1
, if
2
e if
3
so as correntes nas fases do filtro.
1 g
e
2 g
e
3 g
e
g
L
g
L
g
L
f
L
f
L
f
L
1 g
i
2 g
i
3 g
i
1 s
i
2 s
i
3 s
i
1 f
i
2 f
i
3 f
i
Figura 2.11-Circuito do conversor conectado rede.
A equao que representa o balano de tenso entre o ponto de conexo do gerador
rede e o terminal do conversor, mostrado na Figura 2.11, dada a seguir (BOLDEA, 2006):
1 1 1 1
2 2 2 2
3 3 3 3
g g g g
g g g g
g g g g
e i i v
d
e R i L i v
dt
e i i v
( ( ( (
( ( ( (
= + +
( ( ( (
( ( ( (
.
(2.62)
Os smbolos R e L representam o somatrio da resistncia e a indutncia dos
indutores de filtro trifsicos L
f
e dos indutores L
g
que representam de forma simplificada as
caractersticas da rede e do transformador no ponto de conexo comum da rede eltrica com
o gerador elico (PENA et al., 1996) , (DA SILVA, 2006) e (BOLDEA, 2006).
Para o controle do conversor do lado da rede utilizou-se o controle vetorial orientado
no vetor tenso da rede eltrica conforme ilustrado na figura 2.12.
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
37
g
d
g
q
e
g
i
r
gd
i
gq
i
e
g
e
r
e
g gd
e e =
0
e
gq
e =
s
Figura 2.12 - Representao dos eixos coordenados em referencial sncrono orientado pela tenso da rede.
No referencial sncrono dq, o eixo d alinhado com o vetor
g
e de tenso da rede
eltrica, resultando em (PENA et al., 1996) e (BOLDEA, 2006):
0
e
gd g
e
gq
e e
e
(2.63)
Transformando 2.62 atravs da transformao dq0 conforme apresentado no Anexo
A, no referencial sncrono dq, onde o eixo direto coincide com o vetor tenso da rede, tem-
se:
e
gd e e e e
gd gd e gq gd
di
e Ri L Li v
dt
= + + ,
(2.64)
0
e
gq e e e e
gq gq e gd gq
di
e Ri L Li v
dt
= = + + + ,
(2.65)
As equaes (2.64) e (2.65) sero utilizadas para o projeto da malha interna das correntes do
conversor do lado da rede eltrica.
A corrente e a tenso atravs do barramento CC podem ser calculadas pelas seguintes
equaes (BOLDEA, 2006):
c cg cm
i i i = ,
(2.66)
c
c cg cm
dv
C i i
dt
= .
(2.67)
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
38
Sendo
c
v a tenso no barramento CC e as correntes i
cm
e i
cg
podem ser expressas pelas
seguintes equaes:
r
cm
c
P
i
v
= ,
(2.68)
gc
cg
c
P
i
v
= .
(2.69)
Sendo
r
P a potncia ativa do rotor e
gc
P a potncia ativa do conversor do lado da rede
eltrica.
Substituindo-se as equaes (2.68) em (2.67) tem-se:
c r
c cg
c
dv P
C i
dt v
= .
(2.70)
Desprezando-se os harmnicos devido ao chaveamento, as perdas na mquina e no
conversor, a equao de balano da potncia ativa no rotor do conversor do lado da mquina
pode ser escrita como (BOLDEA, 2006), (LIMA, 2009):
3
2
e e
r c cm gd gd
P v i v i = = .
(2.71)
Das equaes (2.70) e (2.71) e com algumas manipulaes algbricas simples, logo se obtm:
3
2
e e
cg gd gd
c
c c c
i v i
dv
dt C C v
= .
(2.72)
Observando-se a equao (2.72) verifica-se que ela no- linear e deve ser linearizada em um
ponto de operao, que ser abordado em detalhes posteriormente.
O controlador adotado deve garantir que a tenso no barramento CC seja constante.
Assim, para assegurar a estabilidade operativa do sistema, o controle deve garantir que o
fluxo de potncia entre os conversores no sofra variao, ou seja, o fluxo de potncia ativa
entre o rotor e o conversor ligado ao rotor
r
P e o fluxo de potncia ativa entre a rede e o
conversor ligado ao sistema
gc
P sejam iguais, ou seja.
r gc
P P =
(2.73)
Com a ao do controlador proposto, a equao acima ser satisfeita, ou seja, a
tenso no barramento se manter constante, apesar de que pequenas variaes transitrias
possam acontecer em processos de transferncia de energia.
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
39
2.6. ESTRATGIA DE CONTROLE CLSSICA
A Figura 2.13 mostra a topologia de controle clssica para o DFIG utilizando
controladores PI.
+
a
sl r qr
L i
* a
dr
i
'
dr
v
* a
dr
v
+
* a
qr
i
'
qr
v
* a
qr
v
a m
sl r dr sl s
s
L
L i
L
| |
+
|
\
*
1 r
v
*
2 r
v
*
3 r
v
1
s
2
s
3
s
*
m
1
PI
*
s
Q
s
Q
5
s
6
s
*
3 g
v
*
2 g
v
*
1 g
v
a
dr
i
*
c
v
* e
gd
i
*
0
e
gq
i =
4
s
+
+
2
PI
3
PI
4
PI
5
PI
6
PI
7
PI
+
+
e
L
+
e
L
+
e
gd
i
e
gd
e
g
123 r
i
r
( )
a r
( )
a r
123 g
i
123 g
e
1 g
e
2 g
e
3 g
e
g
L
g
L
g
L
f
L
f
L
f
L
a
qr
i
e
gq
i
e
gd
i
e
gq
i
* e
gd
v
* e
gq
v
g
'
gd
v
'
gq
v
1 g
i
2 g
i
3 g
i
PCC
1 s
i
2 s
i
3 s
i
1 f
i
2 f
i
3 f
i
1 r
i
2 r
i
3 r
i
Figura 2.13- Estratgia de controle clssica com PI para o DFIG.
Inicialmente essa topologia de controle foi proposta por (PENA et al., 1996) e
continua sendo amplamente utilizada atualmente (BOLDEA, 2006), (QIAO, 2008), (XU,
2008), (OLIVEIRA et al., 2009), (POITIERS et al., 2009), (LIMA, 2009),(COSTA, 2010),
(FERR et al., 2010) e (QU ; QIAO , 2011).
O conversor do lado da mquina tem como funo o controle da velocidade da
mquina, ou potncia ativa do estator, que tem por sinal de referncia a velocidade, que
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
40
possibilita a operao da turbina elica em mximo rendimento, sendo definida a partir de
medies da velocidade do vento (BARROS, 2006). Uma segunda funo do CLM o
controle da potncia reativa que o estator troca com a rede eltrica.
O sinal de erro da potncia reativa do estator a entrada do controlador PI
1
. Esse
controlador fornece o valor de referncia da corrente do rotor do eixo
* a
dr
i . De maneira
anloga, o erro da corrente do eixo direto processado pelo controlador PI
2
que gera em sua
sada o sinal
'
dr
v que ser somado ao termo (
a
sl r qr
L i ) fornecendo a referncia da tenso do
eixo direto
* a
dr
v .
O sinal de erro da malha externa de velocidade a entrada do controlador PI
3
que
gera em sua sada a referncia da malha interna da corrente do rotor do eixo em quadratura
* a
qr
i . O sinal de erro da corrente em quadratura processado pelo controlador PI
4
que gera em
sua sada o sinal
'
qr
v que ser somado ao termo
a m
sl r dr sl s
s
L
L i
L
| |
+
|
\
gerando a referncia
da tenso do eixo em quadratura
* a
qr
v .
As tenses de referncia
* a
dr
v e
* a
qr
v so aplicadas ao bloco transformador de
coordenadas dq/abc que geram as tenses de referncia
*
1 r
v ,
*
2 r
v e
*
3 r
v que sero moduladas
por largura de pulso para gerar os pulsos e acionar as chaves do conversor.
O conversor do lado da rede tem como objetivo regular a tenso do barramento CC
independente do sentido do fluxo de potncia ativa e reativa que flui entre o rotor e a rede
(BOLDEA, 2006). Uma segunda funo manter o fator de potncia unitrio no ponto de
conexo comum com a rede (SALES, 2009) e, consequentemente, o controle de potncia
reativa.
As tenses da rede eltrica
1 g
e ,
2 g
e e
3 g
e so aplicadas ao bloco transformador de
coordenadas abc/ que, atravs de um algoritmo PLL, calcula o ngulo da tenso
g
, como
pode ser observado na Figura 2.13.
No diagrama de controle, a tenso
c
v no barramento CC controlada usando o
controlador PI
5
, que gera em sua sada a referncia da malha interna da corrente
* e
gd
i .
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
41
A corrente de referncia do eixo de quadratura
* e
gq
i considerada igual a zero, tendo
em vista que o conversor opera com fator de potncia unitrio.
Os sinais de erro das correntes dos eixos direto e quadratura so processados pelos
controladores PI
6
e
PI
7
gerando as tenses
'
gd
v e
'
gq
v .
Os termos de acoplamento (
e
e gq
Li ) e (
e
e gd
Li ) so compensados para que garanta o
desacoplamento entre o eixo direto e quadratura.
As tenses de referncias
* e
gd
v e
* e
gq
v so aplicadas ao bloco transformador de
coordenadas dq/abc, que geram as tenses de referncia
*
1 g
v ,
*
2 g
v e
*
3 g
v que so moduladas
via PWM para acionar as chaves do conversor do lado da rede eltrica.
Como j foi mencionado, o conversor do lado da rede est operando com fator de
potncia unitrio. Desta forma, o valor da corrente de referncia no eixo em quadratura
nulo (
*
0
e
gq
i = ), mas dependendo da necessidade do sistema, se tiver trabalhando com carga
isolada ou at mesmo na ligao rede eltrica, esse valor pode ser deferente de zero
(
*
0
e
gq
i ), podendo assumir valores positivos ou negativos de tal forma que gerem reativos
capacitivos ou indutivos (CAMPOS, 2004).
Segundo (LIU, 2011), a corrente
e
gq
i pode ser utilizada para minimizar as perdas,
controle do fator de potncia, filtro ativo de potncia ou fornecimento de potncia reativa
durante um AMT (Afundamento Momentneo de Tenso). De acordo com (OLIVEIRA,
2009) o controle da potncia reativa e, principalmente, do fator de potncia, faz mais sentido
no ponto de conexo da turbina elica com a rede eltrica.
A estratgia de controle referenciada em diversas literaturas aplicada no controle do
DFIG evidencia o uso dos controladores clssicos PI, cujos ganhos e constantes de tempo so
ajustados por tentativa e erro (BARROS, 2006), (FERREIRA, 2009), Zeiglar-
Nicholas(HARRIS, 2009) e alocao de plos (VIEIRA et al., 2009),(OLIVEIRA, 2009).
Segundo (BARROS, 2006) e (FERREIRA, 2009) e (VIEIRA, 2009) para evitar
trabalhar com controladores no-lineares utilizam-se os controladores clssicos PI, cujos
ganhos so ajustados por tentativa e erro at propiciarem a resposta desejada. O ajuste por
tentativa e erro no uma tarefa trivial, e necessita do conhecimento do comportamento
dinmico do sistema elico.
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
42
A topologia clssica com PI tem como vantagem a simplicidade de implementao
do controlador. Porm, essa estrutura no garante a robustez com relao
a variaes paramtricas (BELFEDAL et al., 2010).
2.7 A LINEARIZAO DO MODELO DO CONVERSOR DO LADO DA MQUINA
Na modelagem que considera a dinmica do rotor, o controle feito atravs das
correntes do rotor
a
dr
i e
a
qr
i respectivamente, de forma que o conversor do rotor seja
controlado por correntes, mas modelado como fonte de tenso.
Explicitandose
a
dr
di
dt
e
a
qr
di
dt
nas equaes (2.46) e (2.47) tem-se:
( )
1
a
a a a
dr
dr r dr sl r qr
r
di
v R i L i
dt L
= + ,
(2.74)
1
a
qr a a a
sl m
qr r qr sl r dr s
r s
di
L
v R i L i
dt L L
| |
=
|
\
.
(2.75)
A malha interna de corrente do rotor ser projetada utilizando as equaes (2.74-
2.75) linearizadas de acordo com o anexo B. Desta forma o modelo linearizado pode ser
escrito na forma de equao de estados como:
1
0
1
0
a
r
dr
a a sl
dr dr
r r
a a a
r
qr qr qr
sl
r r
R
di
i v L L
dt
R
di i v
L L
dt
(
( (
(
( (
( (
(
( (
( ( = +
(
( (
( (
(
( (
.
(2.76)
A malha externa de velocidade pode ser representada na forma de equao de estados
baseada em (CMARA, 2007) e (VIEIRA, 2008) e definida como:
1
0
2 2
0 1 0
m
t
m
e
d
D
dt
T
H H
d
dt
(
( (
(
(
( (
= + (
(
( (
(
(
.
(2.77)
O modelo linearizado para o projeto dos controladores do conversor do lado da
mquina pode ser escrito na forma de equao de estados como:
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
43
1
0 0 0
1
0 0 0
1
0 0 0 0
2 2
a
dr
r
a a sl
dr dr
r r
a
qr
a a r
sl qr qr
r r
m e
t
m
di
R
dt
i v
L L
di
R
i v
dt L L
T
D
d
H H
dt
(
( ( (
( ( ( ( (
( ( ( ( (
( ( ( ( (
= +
( ( ( ( (
( ( ( ( (
( ( ( ( (
( ( (
(
(2.78)
Definindo-se como vetor de estados
T
a a
dr qr m
x i i
(
=
,
(2.79)
e vetor de entrada
T
a a
dr qr e
u v v T
(
=
.
(2.80)
Atravs da equao (2.78) e com a utilizao do controlador robusto proposto, que
ser detalhado no captulo 4, pode-se controlar as correntes do rotor
a
dr
i ,
a
qr
i e a velocidade
mecnica da mquina
m
, de forma que o CLM seja controlado por correntes, mas modelado
como fonte de tenso.
2.8 A LINEARIZAO DO MODELO DO CONVERSOR DO LADO DA REDE
Das equaes (2.64-2.65) e (2.72) e com algumas manipulaes algbricas simples,
essas equaes podem ser reescritas segundo as equaes diferenciais (2.81-2.83):
( )
1
e
gd e e e e
gd e gq gd gd
di
R
i Li e v
dt L L
= + + ,
(2.81)
( )
1
e
gq e e e e
gq e gd gq gq
di
R
i Li e v
dt L L
= + ,
(2.82)
3
2
e e
cg gd gd
c
c c c
i v i
dv
dt C C v
= .
(2.83)
A malha interna de corrente do conversor do lado da rede pode ser projetada
utilizando as equaes (2.81-2.83) linearizadas e escritas na forma de equao de estados
como:
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
44
1
0
1
0
e
gd
e e
e
gd gd
e e e
gq gq gq
e
di
R
i v
dt L L
R
di i v
L L
dt
(
( (
(
( (
( (
(
( (
= + ( (
(
( (
( (
(
( (
(
.
(2.84)
O modelo linearizado para o projeto dos controladores do conversor do lado da rede
eltrica pode ser escrito na forma de equao de estados a seguir:
2
1
0 0 0
1
0 0 0
1
3 3
0 0
0
2 2
e
gd
e e
e
gd gd
e
gq
e e
e gq gq
e e e
c cg
gd gd gd
c
c
c c c c
di
R
dt
i v
L L
di
R
i v
dt L L
v i
v v i
dv
C
dt C v C v
(
(
(
(
(
( ( (
(
(
( ( (
(
(
( ( (
(
(
= +
( ( (
(
(
( ( (
(
(
( ( (
(
(
(
(
(
(
(2.85)
Definindo-se como vetor de estados
T
e e
gd gq c
x i i v
(
=
,
(2.86)
e vetor de entrada
T
e e
gd gq cg
u v v i
(
=
.
(2.87)
2.9 O MODELO LINEARIZADO DO SISTEMA EM ESTUDO
O modelo linearizado do DFIG para fins de projeto composto pelos modelos dos
conversores de potncia e a modelagem da turbina elica. A linearizao do modelo do
gerador de induo foi feita travs da expanso em srie de Taylor, desprezando-se os termos
de ordem superior. Desta forma, podem-se considerar apenas os termos lineares. Estes termos
devem ser suficientemente pequenos, isto , os valores das variveis se desviam apenas
ligeiramente da condio de operao.
O modelo dinmico linearizado em um ponto de operao que ser utilizado nos projetos
dos controladores representado pela seguinte equao (PINTO et al., 2011):
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
45
2
0 0 0 0
0 0 0 0
0 0 0 0 0
2
0 0 0 0
0 0 0 0
3 3
0 0 0 0
2 2
r
sl
r
a
dr
r a
sl dr
a
r
qr a
qr
t
m
m
e
e
gd
gd e
e
gq e
gq
e
c
e e e
c
gd gd gd
c c c c
R
L
i
R
i
L
i
i
D
d H
R
dt
i
i
L
i
R
i
v
L
v
v v i
C v C v
(
(
(
(
(
(
(
(
(
(
(
(
(
(
( =
(
(
(
(
(
(
(
(
(
(
(
(
(
(
1
0 0 0 0 0
1
0 0 0 0 0
1
0 0 0 0 0
2
1
0 0 0 0 0
1
0 0 0 0 0
1
0 0 0 0 0
r
a
dr
a r
qr
e
e
gd
e
gq
cg
c
L
v
L
v
T
H
v
L
v
i
L
C
(
(
(
(
(
+
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
+ (
(
(
(
(
(
(
(
(
(
(
(
(
(
(2.88)
Observa-se na equao (2.88) que as curvas Cp () para diversos valores do ngulo
de passo (pitch) no esto sendo considerados no modelo apresentado. Porm, facilmente
pode-se encontrar um modelo para o sistema elico considerando uma turbina elica de passo
varivel.
Substituindo a equao (2.7) que representa o torque mecnico da turbina elica em
(2.8), resulta na seguinte equao diferencial:
3
1
( , )
2
2 2 2
p w p
m e t m
m
A V C
d T D
dt H H H
= .
(2.89)
Linearizando o sistema, considerando a equao (2.89) tem-se o modelo completo
que composto pelos modelos da mquina de induo duplamente alimentada, dos
conversores de potncia, da turbina elica e o controle do ngulo de passo, representados pela
seguinte equao:
CAPTULO 2 SISTEMA DE CONVERSO DE ENERGIA ELICA
46
3 3
2
2
0 0 0 0
0 0 0 0
1 1
( , )
( , )
2 2
0 0 . . 0 0 0
2 2
0 0 0 0
0 0 0 0
3 3
0 0 0 0
2 2
r
sl
r
a
r
dr
sl
r
a
qr
p w p p w
p p
m
m w m
e
gd
e
e
gq
e
c
e e e
gd gd gd
c c c c
R
L
R
i
L
i
A V C A V
d C R
d
H d V H
dt
i
R
L
i
R
L
v
v v i
C v C v
(
(
(
(
(
= + (
( =
(
(
(
(
(
(
1
0 0 0 0 0
1
0 0 0 0 0
1
0 0 0 0 0
2
1
0 0 0 0 0
1
0 0 0 0 0
1
0 0 0 0 0
a
dr
a
qr
m
e
gd
e
gq
c
r
a
dr
a r
qr
e
e
gd
e
gq
cg
c
i
i
i
i
v
L
v
L
v
T
H
v
L
v
i
L
C
(
(
(
(
(
(
(
(
(
(
(
(
(
(
+ (
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
+ (
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(2.89)
O controle do ngulo de passo uma estratgia de controle para limitar a potncia
gerada sempre que a potncia nominal do gerador ultrapassada. Devido a um aumento da
velocidade do vento, as ps do rotor so giradas em torno do seu eixo longitudinal, ou seja, as
ps mudam o seu ngulo de passo para reduzir o ngulo de ataque. Esta reduo do ngulo de
ataque diminui as foras aerodinmicas atuantes e conseqentemente a extrao da potncia
mecnica.
2.10 CONCLUSES
No presente captulo, foi desenvolvida detalhadamente a modelagem matemtica do
gerador de induo e controle dos conversores de potncia aplicando a tcnica de controle
vetorial, que proporciona o controle independente do torque e da excitao do rotor. Os
conversores foram modelados como fontes de tenso, mas controlados por correntes. Foi
apresentada tambm a linearizao dos sistemas dinmicos atravs da expanso em srie de
Taylor em torno de um ponto de operao e, finalmente, desenvolveu-se um modelo
linearizado completo para o DFIG e seus conversores de potncia, sendo representado por um
sistema no espao de estados para fins de projeto de controle.
Você também pode gostar
- 38 - Dodge Dakota - Manual de Manutencao - MOTORDocumento194 páginas38 - Dodge Dakota - Manual de Manutencao - MOTORRicardo Assan50% (12)
- Motores Cursor 13, Parte 2 Das 4 Partes IvecoDocumento38 páginasMotores Cursor 13, Parte 2 Das 4 Partes IvecoFernando Villa Franca100% (10)
- Apostila TurbinasDocumento58 páginasApostila TurbinasEmanueleFaria100% (1)
- Eletromecânico de Refrigeração e Climatização CTDocumento3 páginasEletromecânico de Refrigeração e Climatização CTAfonso ChanAinda não há avaliações
- Usinagem QuestõesDocumento2 páginasUsinagem QuestõesDaniel AleixoAinda não há avaliações
- Lista Exercicios Ensaio e TraçãoDocumento2 páginasLista Exercicios Ensaio e TraçãoJonatas Lima dos Santos0% (1)
- Resumodontologia - Parte 3Documento93 páginasResumodontologia - Parte 3nathalia cardoso100% (1)
- Lista 1Documento2 páginasLista 1Rafael TomazAinda não há avaliações
- 03-Desgaste e Vida de Ferramentas de CorteDocumento14 páginas03-Desgaste e Vida de Ferramentas de CorteRodrigo ManoelAinda não há avaliações
- ME340 Pratica 05 - ResoluçãoDocumento7 páginasME340 Pratica 05 - ResoluçãoJosé WilliamAinda não há avaliações
- Engates PCL 17 - 18 - 21Documento1 páginaEngates PCL 17 - 18 - 21paulasouza88Ainda não há avaliações
- DP Resistencia Dos Materias UNIP NP1 e NP2 Com Respostas-1-1Documento23 páginasDP Resistencia Dos Materias UNIP NP1 e NP2 Com Respostas-1-1Luiz Felipe CestariAinda não há avaliações
- Catalogo Sulcador Asa Reta 3 Linhas 1 09 03 01 00 003Documento4 páginasCatalogo Sulcador Asa Reta 3 Linhas 1 09 03 01 00 003GerletonSantosAinda não há avaliações
- Questões de RevisãoDocumento4 páginasQuestões de RevisãoJoaquim GeraldoAinda não há avaliações
- Mecanica Dos Fluidos Aula2Documento24 páginasMecanica Dos Fluidos Aula2criei1Ainda não há avaliações
- Relatório Experimento Movimento BalísticoDocumento2 páginasRelatório Experimento Movimento Balísticoteu cuAinda não há avaliações
- Relatorio Dispensa 791180 132023Documento10 páginasRelatorio Dispensa 791180 132023Felipe MelloAinda não há avaliações
- Catalogo MagnexDocumento6 páginasCatalogo MagnexLui Cezar MendesAinda não há avaliações
- Rittal - Catálogo de Peças de Reposição - 2019Documento10 páginasRittal - Catálogo de Peças de Reposição - 2019AFC CompressoresAinda não há avaliações
- FlambagemDocumento30 páginasFlambagemLeonardo Kyo KabayamaAinda não há avaliações
- Manual Fazer 250Documento10 páginasManual Fazer 250Marcelo Zasso0% (1)
- Exercicios Flexao - Dobramento - Dureza - Fadiga TECDocumento3 páginasExercicios Flexao - Dobramento - Dureza - Fadiga TECCristyan Luiz Matos de JesusAinda não há avaliações
- Elaboração de RQPS - EPSDocumento26 páginasElaboração de RQPS - EPSCesar Augusto100% (1)
- Metalurgia Da Soldagem - Fundamentos Da Formação e Solidificação Da Zona FundidaDocumento30 páginasMetalurgia Da Soldagem - Fundamentos Da Formação e Solidificação Da Zona FundidaSérgio Barra100% (2)
- Motores - Vol. 2 - Parte 2Documento142 páginasMotores - Vol. 2 - Parte 2Hermes RenatoAinda não há avaliações
- Colhedora de Cana - AGCO - ApostilaDocumento85 páginasColhedora de Cana - AGCO - Apostilacesah1988100% (1)
- AL Bola ResumidaDocumento2 páginasAL Bola ResumidaBea NeivaAinda não há avaliações
- Guia Rápido S600Documento2 páginasGuia Rápido S600João Pedro PortoAinda não há avaliações
- Relatório Marcelo SilmaraDocumento22 páginasRelatório Marcelo SilmaraluizAinda não há avaliações
- Propriedades Dos GasesDocumento41 páginasPropriedades Dos GasesGuilherme MarangonAinda não há avaliações