Você também pode gostar
- Um guia seguro para o céuDocumento77 páginasUm guia seguro para o céuUbiratã Ribeiro100% (4)
- Anexo 8 - ATA de Registro de Integração de Segurança - (Rev - 2018)Documento2 páginasAnexo 8 - ATA de Registro de Integração de Segurança - (Rev - 2018)Jickson VieiraAinda não há avaliações
- Astrologia HerméticaDocumento7 páginasAstrologia HerméticaAle PassarelliAinda não há avaliações
- Recepção, preparo e moagem da cana-de-açúcarDocumento99 páginasRecepção, preparo e moagem da cana-de-açúcarwl_santos100% (1)
- Doubleway 3F 380 Dwtt10a2 - Dwtt80a2Documento78 páginasDoubleway 3F 380 Dwtt10a2 - Dwtt80a2Janaína da Silva dos Santos100% (1)
- Cálculo estrutural linha de vida industrialDocumento12 páginasCálculo estrutural linha de vida industrialPaulo VenutoAinda não há avaliações
- Prova de Matemática do 6o ano do CMBDocumento24 páginasProva de Matemática do 6o ano do CMBOsmayr SousaAinda não há avaliações
- Religião PráticaDocumento340 páginasReligião PráticaAugusto Magalhães100% (1)
- Estatuto Da Polícia Civil PiauiDocumento24 páginasEstatuto Da Polícia Civil PiauiAugusto MagalhãesAinda não há avaliações
- SLIDES 1-Gerenciamento de MemóriaDocumento10 páginasSLIDES 1-Gerenciamento de MemóriaAugusto MagalhãesAinda não há avaliações
- 1 - Você Não Pode Ser SalvoDocumento7 páginas1 - Você Não Pode Ser SalvoAugusto MagalhãesAinda não há avaliações
- Malha Fech Aula 1 SLIDE 2015Documento13 páginasMalha Fech Aula 1 SLIDE 2015Augusto MagalhãesAinda não há avaliações
- Apostila 2aturma Vs1Documento16 páginasApostila 2aturma Vs1Augusto MagalhãesAinda não há avaliações
- Lab 1 Tristate Bus MemóriaDocumento3 páginasLab 1 Tristate Bus MemóriaAugusto MagalhãesAinda não há avaliações
- Transmissão sem distorções e filtros ideaisDocumento22 páginasTransmissão sem distorções e filtros ideaisAugusto MagalhãesAinda não há avaliações
- CLP IntroDocumento32 páginasCLP IntroAugusto MagalhãesAinda não há avaliações
- Trabalho de Ciencias AmbDocumento2 páginasTrabalho de Ciencias AmbAugusto MagalhãesAinda não há avaliações
- Quilombo SDocumento2 páginasQuilombo SAugusto MagalhãesAinda não há avaliações
- Campoe 1Documento1 páginaCampoe 1Augusto MagalhãesAinda não há avaliações
- Primeira AulaDocumento20 páginasPrimeira AulaAugusto MagalhãesAinda não há avaliações
- Matemática na Educação 1 - Avaliação a Distância 2 - 2019.1Documento4 páginasMatemática na Educação 1 - Avaliação a Distância 2 - 2019.1Jessica Moreira100% (2)
- Pedido 1064Documento1 páginaPedido 1064Diego CarlosAinda não há avaliações
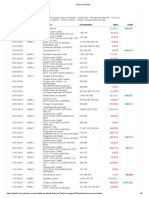
- SISBB - Sistema de Informações Banco Do Brasil - 23/03/2020 - Autoatendimento BB - 20:18:23 Agência: 3069-4 Conta: 27060-1 ClienteDocumento3 páginasSISBB - Sistema de Informações Banco Do Brasil - 23/03/2020 - Autoatendimento BB - 20:18:23 Agência: 3069-4 Conta: 27060-1 ClienteDomínio FrancaAinda não há avaliações
- 7/8" Cellflex Premium - Atenuação de Baixa Perda - Cabo Coaxial - PE ExpansoDocumento1 página7/8" Cellflex Premium - Atenuação de Baixa Perda - Cabo Coaxial - PE ExpansoRaphael PioAinda não há avaliações
- Prova de Certificação GOEDocumento13 páginasProva de Certificação GOEressbAinda não há avaliações
- Edital ALCE Técnico Legislativo 2020Documento2 páginasEdital ALCE Técnico Legislativo 2020Regis da SilvaAinda não há avaliações
- Avaliação de Gestão de Qualidade e ProdutividadeDocumento3 páginasAvaliação de Gestão de Qualidade e ProdutividadeRegina MarquesAinda não há avaliações
- Listado CCTV Febrero 2020 Hikvision - Precio MayorDocumento11 páginasListado CCTV Febrero 2020 Hikvision - Precio MayorJosue ValdezAinda não há avaliações
- Comportamento Do Consumidor Processo de Decisão de CompraDocumento11 páginasComportamento Do Consumidor Processo de Decisão de Comprabahrovaris100% (1)
- Karl MarxDocumento13 páginasKarl MarxMarcos V GarciaAinda não há avaliações
- Modelo Capm e Teorias AlternativasDocumento20 páginasModelo Capm e Teorias AlternativasAnderson SousaAinda não há avaliações
- Laboratório Java OODocumento155 páginasLaboratório Java OOJanerson DouglasAinda não há avaliações
- Estresse Ocupacional e A Sindrome de Burnout Na Vida Profissional Das MulheresDocumento50 páginasEstresse Ocupacional e A Sindrome de Burnout Na Vida Profissional Das Mulheresgcarlos_24Ainda não há avaliações
- Clip 18042014Documento61 páginasClip 18042014Ronnie TurriniAinda não há avaliações
- NAMITECDocumento2 páginasNAMITECAlexandre KennedyAinda não há avaliações
- GB Prova PreparatóriaDocumento7 páginasGB Prova PreparatórialeohenriquecostaAinda não há avaliações
- PEX.004.01 - Chave Seccionadora Unipolar PDFDocumento14 páginasPEX.004.01 - Chave Seccionadora Unipolar PDFMario Cesar PestanaAinda não há avaliações
- 3 - Aspectos Tecnológicos Da Usinagem A Seco e Com Mínima Quantidade de Fluido Na Furação Com Broca Helicoidal - MestradoDocumento208 páginas3 - Aspectos Tecnológicos Da Usinagem A Seco e Com Mínima Quantidade de Fluido Na Furação Com Broca Helicoidal - MestradoAmanda Dela JustinaAinda não há avaliações
- EC380D L Volvo valve specificationsDocumento2 páginasEC380D L Volvo valve specificationspaulo100% (1)
- Simulado 3-CompletoDocumento12 páginasSimulado 3-CompletoSAILAVELLOSOAinda não há avaliações
- COMO CHEGAR A ACORDOS SEM CONCESSÕESDocumento25 páginasCOMO CHEGAR A ACORDOS SEM CONCESSÕESGuta BiazzettoAinda não há avaliações
- Manual de Uso Do ER9x. Porque Você Pediu Por Isto!Documento37 páginasManual de Uso Do ER9x. Porque Você Pediu Por Isto!Edson ReisAinda não há avaliações
- AP3 Met Est I 2022-2 - GABARITODocumento5 páginasAP3 Met Est I 2022-2 - GABARITOcintiaAinda não há avaliações
- Receitas de caldos e carnes na graduação em NutriçãoDocumento8 páginasReceitas de caldos e carnes na graduação em NutriçãoDyego SeixasAinda não há avaliações