Escolar Documentos
Profissional Documentos
Cultura Documentos
1.PRASC 1 Fmsol PDF
Enviado por
bercianaa berTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
1.PRASC 1 Fmsol PDF
Enviado por
bercianaa berDireitos autorais:
Formatos disponíveis
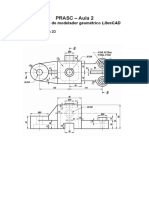
PROJECTO ASSISTIDO POR
COMPUTADOR
FUNDAMENTOS
DE MODELAÇÃO LICENCIATURA EM
DE SÓLIDOS ENGENHARIA DE SISTEMAS
FILIPE PACHECO / ISEP
(ORIGINAL DE ANTÓNIO COSTA)
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 1
Introdução
•Modelação Geométrica
–Consiste em técnicas de criação de entidades geométricas
–É independente de qualquer dimensão (1, 2, 3, etc)
•Modelação de Sólidos
–É uma área da modelação geométrica que lida com sólidos
–Permite interrogação sobre diversos aspectos do sólido:
–Propriedades volumétricas
–Propriedades geométricas
–Propriedades topológicas
•Mas o que é um Sólido?
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 2
Topologia
de Caminhos Fechados
•Teorema do Caminho Fechado
–Enunciado: “O ângulo total percorrido ao longo de um caminho fechado é um múltiplo
inteiro de 360º”
–O número inteiro referido é o número de voltas (NR) do caminho
–É uma propriedade intrínseca do caminho e que não depende do ponto inicial nem da
orientação
–Exemplos (calculem o NR):
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 3
Topologia
de Caminhos Fechados
•Teorema do Ciclo Simples
–Enunciado:
“O ângulo total varrido num caminho fechado que não se auto
intersecta é ±360º”
–O seu valor de NR é 1
–Existe uma relação entre o valor de NR e o número de auto
intersecções (qual?)
–Curvas que formem caminhos fechados e se possam deformar umas
nas outras dizem-se topologicamente equivalentes
–Curvas fechadas topologicamente equivalentes têm o mesmo valor de
NR
–Curvas fechadas com o mesmo valor de NR podem ser deformadas
umas nas outras (provado apenas em 1936)
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 4
Deformações do Plano
Deformação do Plano
–Imagine-se um superfície plana de borracha
–Esticar ou encolher a superfície plana de borracha pode transformar retas em curvas ou
curvas em retas
–Não surgem nem desaparecem pontos de intersecção de caminhos
–Qualquer caminho fechado simples pode ser deformado num quadrado ou vice-versa
Teorema da Deformação de Curvas Fechadas Simples
◦Enunciado:
“Para qualquer curva fechada simples no plano, existe uma deformação elástica do plano
que transforma a curva num quadrado”
◦Exige algum esforço de abstração para ser compreendido
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 5
Deformações do Plano
Equivalência
Topológica
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 6
O Teorema de Jordan
•O Teorema de Jordan
–Enunciado:
“Qualquer curva fechada simples no plano divide esse plano exatamente
em duas regiões (interior e exterior)”
–Decorre do teorema de deformação de curvas fechadas simples
–Para além de existir um interior e um exterior, o interior pode ser
sempre deformado de forma elástica no interior de um quadrado
–Uma região que pode ser deformada no interior de um quadrado
designa-se um disco topológico
–Um disco topológico não possui buracos nem pontos isolados
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 7
Curvatura de uma Superfície
Num plano sabemos (Euclides descobriu isto algures em 300
AC) que:
• Duas retas distintas intersectam-se no máximo uma vez;
• Existem retas que não se intersectam (paralelas);
• Os ângulos internos de um triângulo somam 180º
No entanto há muitas outras superfícies, como, por exemplo,
uma esfera. E no caso específico da esfera as regras atrás
passam a ser:
• Duas geodésicas (uma linha na superfície sempre na mesma
direção) distintas intersectam-se exatamente duas vezes;
• Não existem paralelas;
• Os ângulos internos de um triângulo somam sempre mais que
180º.
https://www.math.tecnico.ulisboa.pt/~jnatar/lectures/Curvatura.pdf
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 8
Curvatura Local e
Curvatura Global
•Curvatura Local e Curvatura Global
–A curvatura local é uma propriedade local de um ponto de uma
superfície e define-se por k=1/r2, sendo r o raio da esfera que aproxima a
superfície na vizinhança do ponto
–A curvatura global K é uma versão global da curvatura local,
considerando todos os pontos da superfície
–K é um invariante topológico de superfícies fechadas
◦Curvatura global da esfera: 4π
◦Curvatura global do toro: 0
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 9
Colagem de Pegas
–É um processo prático de criar novas superfícies a
partir de outras pré-existentes e permite conhecer a
curvatura global do resultado
Toro = esfera – 2 discos + cilindro
O toro pode ser considerado como sendo uma esfera
com uma pega colada (através de um processo de
“colagem de pegas”)
Dado que as curvaturas globais da esfera (4π), do disco
(0) e do toro são conhecidos (0)
→ então a curvatura da pega (cilindro deformado) é -4π
O processo de adicionar uma pega implica que a
curvatura global diminua 4π
Resulta a fórmula: Kesfera com n pegas = 4π(1-n)
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 10
Esferas e Pegas
•Exemplo
–Fórmula: Kesfera com n pegas = 4π(1-n)
–Qual é o equivalente topológico da figura
ao lado, em termos de esfera e pegas?
–Qual é a sua curvatura global K?
?
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 11
Superfícies Planas
Elementares
• Conceito de Poliedro
–É um arranjo de polígonos em que:
–Apenas dois e só dois polígonos partilham cada aresta
–É possível viajar pela superfície do poliedro e passar por todos os polígonos através de um caminho
contínuo
–Um poliedro simples é aquele que pode ser deformado de modo contínuo numa
esfera
–Os poliedros regulares são um subconjunto dos poliedros simples em que todas as faces são polígonos
regulares (i.e. todos os lados e ângulos iguais), todos os vértices formam ângulos iguais
–Poliedros convexo → todos os pontos da superfície podem ser ligados a qualquer
outro ponto da superfície por um segmento de recta no interior do sólido
Regular, Simples, Não Simples
Convexo Não Convexo
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 12
Superfícies Planas
Elementares
•Relações entre Vértices, Arestas e Faces
–No caso de um poliedro simples, é conhecida uma relação entre o seu
número de vértices(V), arestas (E) e faces (F)
–Fórmula de Euler:
V–E+F=2
–Um poliedro regular tem as suas faces definidas pelo mesmo número
de arestas (h), cada vértice possui o mesmo número de arestas (k) e as
arestas possuem o mesmo comprimento
–Quantos poliedros regulares existem?
◦Premissa 1: cada aresta pertence a duas faces ( Fh = 2E )
◦Premissa 2: cada aresta tem dois vértices ( Vk = 2E )
◦Resulta imediatamente que: Fh = 2E = Vk
https://www.mathsisfun.com/geometry/platonic-solids-why-five.html
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 13
Superfícies Planas
Elementares
•Sólidos Platónicos
–Quantos poliedros regulares existem?
◦V – E + F = 2 ; Fh = 2E = Vk
◦Logo 2E/k – E + 2E/h = 2
◦Ou seja 1/E = 1/h + 1/k – 1/2
◦Num poliedro, h e k têm de ser maiores que 2, mas ambos não podem ser maiores do que 3!
(exercício)
◦Logo h ou k tem de ser 3, pelo que o outro tem de estar entre 3 e 5
0 < 1/E = 1/3 + 1/k – 1/2 (no caso de h valer 3)
◦Em termos de (h,k,E), as combinações possíveis são:
(3,3,6) (4,3,12) (3,4,12) (5,3,30) (3,5,30) – apenas 5
–Apenas existem 5 poliedros regulares, o que já era conhecido nos
tempos do grego Euclides!
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 14
Superfícies Planas
Elementares
•Poliedros não Simples
–Estes poliedros são topologicamente equivalentes de qualquer sólido
com buracos
–Em termos topológicos, são esferas com pelo menos uma pega
–Qualquer superfície fechada que não se auto intersecte pode ser
definida como uma esfera com g pegas – g é o genus da superfície
–Os poliedros simples têm genus 0, os não simples maior do que 0
–Fórmula de Euler alargada:
V – E + F = 2 – 2g
–Pode determinar-se o genus de um poliedro através da contagem de
vértices, arestas e faces
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 15
Superfícies Planas
Elementares
•Representação de um Poliedro
–Pode descrever-se um poliedro através das suas faces e das
adjacências das suas arestas – atlas topológico do poliedro
–Exemplo: pirâmide truncada
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 16
Superfícies Planas
Elementares
•Representação de Poliedros
–Formas de junção de arestas
0
◦Com ou sem orientação do sentido das arestas
◦Um atlas que inclua orientação de arestas pode dar 3 5 1
origem a curiosidades matemáticas – superfícies não
[(1,1)(2,3)] 2
orientáveis
0 0 0 0
–Exemplo de um cubo:
◦Atlas é definido por
3 1 1 3 2 1 3 3 1 3 4 1
[(1,1)(2,3)] [(1,2)(6,2)] 2 2 2 2
[(1,0)(5,0)] [(1,3)(4,1)]
0
... (restantes 8)
◦Ao todo 12 associações [(1,2)(6,2)]
3 6 1
correspondentes às 12 arestas 2
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 17
Superfícies Planas
Elementares
•A Fita de Mobius
–Considere-se um quadrado
◦Se unirmos arestas opostas mantendo a orientação resulta um cilindro
◦Senão resulta uma superfície “torcida” designada Fita de Mobius
–O curioso mundo de Mobius
◦Se um habitante de Mobius der uma volta ao longo da extensão da fita, quando retornar ao
início constata que a esquerda e a direita estão trocadas (porquê?)
◦A noção de esquerda / direita não são intrínsecas de uma superfície e dependem de um
observador externo
◦Logo não é possível dizer que uma dada direcção num qualquer ponto é para a esquerda ou
para a direita
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 18
Superfícies Planas
Elementares
•A Fita de Mobius
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 19
Superfícies Planas
Elementares
•Orientabilidade
–Uma superfície em que a esquerda e a direita nunca surgem trocadas
designa-se orientável (no caso oposto não-orientável)
–É uma propriedade intrínseca de uma superfície orientável
–Qualquer superfície fechada representável em 3D é topologicamente
equivalente a uma esfera com zero ou mais pegas
◦A superfície de uma esfera é orientável e juntar pegas não altera isso
◦Ou seja, qualquer superfície fechada orientável é topologicamente equivalente a uma esfera
com zero ou mais pegas
–Existem superfícies não-orientáveis em 3D?
◦Pensem na Fita de Mobius...
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 20
Superfícies Planas
Elementares
•A Garrafa de Klein
–Pode ser obtida à custa da Fita de
Mobius através da junção das arestas
A B
livres e mantendo a mesma orientação
–Atlas de superfícies obtidas a partir de
folha elástica com 4 arestas:
A – cilindro;
B – toro
C D
C – fita de Mobius;
D – garrafa de Klein
◦A garrafa de Klein não pode ser
construída em 3D (porquê?)
◦A superfície E (atlas restante) E
designa-se plano projetivo e
é ainda mais estranha!
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 21
Superfícies Planas
Elementares
•Garrafas de Klein
https://www.curiousminds.co.uk/
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 22
Superfícies Planas
Elementares
•Curvatura de Superfícies compostas por Faces Planas
–A curvatura K reside apenas nos vértices, sendo
K = 2πV – i=1..F fi ; (fi é a soma dos ângulos internos da face)
–Note-se que a curvatura não depende da forma como as arestas das
faces se ligam, i.e., não é preciso conhecer o atlas para calcular K
–No caso de faces quadradas, resulta que a curvatura do objeto é
K = 2π(V – F), definindo-se apenas pelos parâmetros V e F!
–No caso geral de superfícies fechadas compostas de faces planas, a
curvatura é K = 2π(V – E + F)
–V – E + F é designada a característica de Euler de uma superfície
fechada e é um invariante topológico
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 23
Superfícies Curvas
Fechadas
•A Característica de Euler (χ) e a Curvatura Global (K)
–χ = (V – E + F) para qualquer superfície fechada de faces planas
–K = 2πχ para qualquer superfície fechada de faces planas
–A prova é simples:
◦Qualquer alteração numa malha poligonal pode ser feita através de
–Adição / remoção de uma face através da adição / remoção de uma aresta
–Adição / remoção de uma aresta através da adição / remoção de um vértice
◦Ambos os processos mantém V – E + F constante
◦Qualquer malha poligonal conduz ao mesmo resultado
–Teorema de Gauss-Bonnet
K = 2πχ
para qualquer superfície fechada
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 24
O Conceito
de Fronteira
•Fronteira de Objetos
–Seja o espaço 3D designado por E3
(o espaço 2D por E2)
–Pontos em E3 representam-se
através de 3 números
–Uma região R3 é uma porção finita
e limitada de E3 Rb
◦Os seus pontos fazem parte de dois
RE
exterior
subconjuntos: R = [Ri,Rb]
Ri
◦A fronteira de uma região R3 é uma superfície
fechada
◦As descontinuidades de curvatura originam
RV
vértices RV3 e arestas RE3
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 25
O Conceito
de Fronteira
•Regiões de E3
–Seja Rm,n = [Bm-1,n,Im,n] uma região de dimensão m existente num espaço
de dimensão n (m≤n)
◦Bm-1,n é a fronteira da região (e também uma região)
◦Im,n é o conjunto de pontos do seu interior
–Em E3 podem existir as seguintes regiões:
Rm,n Nome Bm-1,n Im,n
R0,3 ponto ponto vazio
R1,3 curva extremos restantes
R2,3 superfície curva(s) fechada(s) restantes
R3,3 sólido superfície(s) fechada(s) restantes
–Numa região “homogénea” B2,3 define implicitamente I3,3
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 26
Operadores
Booleanos
•Combinação de Polígonos
–Exemplo:
◦Os polígonos A e B foram parametrizados no mesmo sentido
◦O interior do polígono fica à esquerda do percurso na fronteira
A
4
◦Existem algoritmos para efetuar 2
as três operações booleanas entre
dois polígonos 1 3
B
◦Os pontos comuns são fulcrais (1,2,3,4)
União Diferença Intersecção
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 27
Operadores
Booleanos
•Teoria de Conjuntos
–Operações binárias (intersecção) e (união)
•Operadores Booleanos
–Semelhantes aos da teoria de conjuntos, mais – (diferença)
–Combinação de objetos a fim de produzir objetos
–O resultado deve ser formado por objetos que:
◦Sejam conjuntos fechados de pontos
◦Possuam fronteira e interior
◦Preservem a dimensionalidade dos objetos iniciais
–Os operadores booleanos “diretos” podem gerar objetos inválidos
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 28
Operadores
Booleanos
•Objetos Inválidos
–Exemplo:
a a
B
A
b
b
–Resultado: a solução é correta em termos matemáticos, mas
geometricamente incorreta (não existe interior)
–Solução: um novo “operador booleano” que reconheça resultados
incorretos e os corrija (resultado geometricamente correto)
–Os operadores booleanos “regularizados” definem-se com esse fim
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 29
Classificação
de Pontos
•Classificação de pontos
–Se A for um conjunto regularizado então
◦iA – interior de A
◦bA – fronteira de A
◦cA – exterior de A
–Consiste em determinar se um ponto pertence ao interior, à fronteira ou
ao exterior de um conjunto
–A formalização da classificação de pontos em conjuntos é em geral
matematicamente complicada, mas existe muito trabalho teórico
desenvolvido para aplicação em modelação geométrica
◦R. Tilove (1980) e outros na Universidade de Rochester
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 30
Operadores
Booleanos
• Operadores regularizados
–Produzem um resultado fechado e dimensionalmente homogéneo
–Para qualquer objeto A, tem-se que A = bA iA
–A combinação de dois objetos A e B através do operador de conjunto
resulta no objeto C
◦C = A B
◦C = (bA iA) (bB iB)
◦C = (bA bB) (iA bB) (bA iB) (iA iB)
–A regularização do operador sobre A e B produz
◦iC = Fi(, bA, iA, bB, iB) = ?
◦bC = Fb(, bA, iA, bB, iB) = ?
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 31
Operadores
Booleanos
• Operadores regularizados
–Intersecção regularizada (C = A * B)
◦iC* = iA iB
◦bC* = Validb(bA bB) (iA bB) (bA iB)
–União regularizada (C = A * B)
◦iC* = iA iB [Validi(bA bB)]
◦bC* = bA bB – [(bA iB) (iA bB) Validb(bA bB)]
–Diferença regularizada (C = A –* B)
◦iC* = iA – bB – iB
◦bC* = (bA – bB – iB) (iA bB) Valid(bA bB)
–Estes operadores são independentes da dimensão espacial!
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 32
Classificação
de Pontos
•Classificação de pontos em modelação
–O problema teórico de classificação de pontos tem semelhança com
problemas relacionados com a modelação:
◦Inclusão de pontos: dados um sólido e um ponto, este está dentro, fora ou na fronteira?
◦Recorte de linhas/polígono: dados um polígono e uma linha, que parte da linha está dentro do
polígono?
◦Intersecção de polígonos: dados dois polígonos, qual é a sua intersecção?
◦Interferência de sólidos: dados dois sólidos, será que eles interferem mutuamente (existe
intersecção)?
–A classificação pode feita com entidades para além de pontos
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 33
Lei de Euler
•Objetos de Euler
–Um objeto de Euler satisfaz a Lei de Euler:
vértices(V),
V–E+F=2 arestas (E)
faces (F)
–Os processos de adicionar ou remover vértices, arestas ou faces a um
objeto de Euler designam-se Operadores de Euler
◦Operadores de vértice (alteram arestas e/ou faces)
◦Operadores de aresta (alteram vértices e/ou faces)
◦Operadores de face (alteram vértices e/ou arestas)
–Estes operadores constituem uma forma racional de construção de
objeto sólidos do tipo poliedro com garantia de validade topológica
(fechados e orientáveis)
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 34
Lei de Euler
–A Lei de Euler aplica-se a superfícies fechadas desde que:
◦Todas as faces sejam simplesmente conexas e sem buracos
◦O objeto seja simplesmente conexo e sem buracos
◦Cada aresta junte duas faces e possua um vértice em cada extremidade
◦Pelos menos três arestas convirjam em qualquer vértice
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 35
Lei de Euler
–Aplicados a malhas curvas
–Aplicados a um cubo
aresta
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 36
Lei Generalizada
de Euler
•Modificação da Fórmula de Euler
–Enunciado:
“Num espaço 3D dividido em C células poliédricas, os vértices, arestas e
faces relacionam-se através de V – E + F – C = 1”
–Exemplo:
o vértice interior do cubo dá origem a seis
células poliédricas (C = 6), logo resulta que
9(V) – 20(E) + 18(F) – 6(C) = 1
–As perfurações num poliedro podem ser
◦Totais – passagens (ou buracos)
◦Parciais – concavidades
–Em ambos os casos a Fórmula de Euler simples não serve!
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 37
Lei Generalizada
de Euler
•Poliedros com perfurações
A B
Exemplos:
A: 16 – 24 + 10 = 2 ❌
Viola 2 regras anteriores
B: 16 – 32 + 16 = 0 2! ❌
Arestas adicionais invalidam a fórmula de Euler
Lei Generalizada de Euler:
V – E + F – H = 2(B – P)
H – buracos em faces; B – objetos; P – passagens
- Aresta junta duas faces C D
- Vértices com três ou mais arestas
C: 16 – 24 + 11 – 1 = 2(1 – 0) ✔
D: 16 – 28 + 14 – 0 = 2(1 – 0) ✔
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 38
Operadores
de Euler
•Lei Generalizada de Euler
–V – E + F – H = 2(B – P)
Existe uma estrutura de dados para objetos de Euler sse:
◦V, E, F, H, B, P 0
◦Se V, E, F, H = 0, então B, P = 0
◦Se B 0, então V > B e F > B
•Operadores de Euler
–5 operadores que representam todas as transições aceitáveis
–Cada operador tem um operador complementar
–Dado um conjunto válido (V,E,F,H,B,P), os operadores de Euler não
invalidam a Lei Generalizada de Euler!
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 39
Operadores
de Euler
•Operadores de Euler
–Primitivos
◦MEV – make edge and vertex
◦MFE – make face and edge
◦MBFV – make body, face and vertex
◦MRB – make reentrancy and body
◦ME-KH – make edge and kill hole
–Complementares (Kill…)
◦KEV, KFE, KBFV, KRB, KE-MH
–Operam sobre a Lei de Euler Generalizada V – E + F – H = 2(B – P)
incrementando ou decrementando pelo menos duas das parcelas
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 40
Operadores
de Euler
•Relação entre os Operadores e a Lei de Euler
V – E + F – H = 2(B – P)
V [+1] E [-1] F [+1] H [-1] 2B [+2] 2P [-2]
MEV 1 1 0 0 0 0
MFE 0 1 1 0 0 0
MBFV 1 0 1 0 1 0
MRB 0 0 0 0 1 1
ME-KH 0 1 0 -1 0 0
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 41
Operadores
de Euler
–Exemplo de aplicação ao tetraedro (V=4,E=6,F=4,H=P=0,B=1)
VAZIO
0.
1. MBFV 2. MEV 3. MEV
SÓLIDO
4. MEV 5. MFE 6. MFE 7. MFE
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 42
Operadores
de Euler
Exemplo de aplicação ao tetraedro (V=4, E=6, F=4, H=P=0, B=1)
Operação V E F H B P
1. MBFV 1 0 1 0 1 0
2. MEV 1 1 0 0 0 0
3. MEV 1 1 0 0 0 0
4. MEV 1 1 0 0 0 0
5. MFE 0 1 1 0 0 0
6. MFE 0 1 1 0 0 0
7. MFE 0 1 1 0 0 0
Final 4 6 4 0 1 0
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 43
Operadores
de Euler
–Cada operador é um algoritmo complexo que opera sobre uma estrutura
de dados a partir dos parâmetros fornecidos
–Em 1974 foi construída uma ferramenta de modelação baseada em
Operadores de Euler (GEOMED, Baumgart)
–Geralmente só na última operação é que surge um sólido válido em
termos topológicos, sendo os estados intermédios não-sólidos
–Um poliedro possui nove tipos de relações topológicas entre pares de
três tipos de elementos: Vértices, Arestas, Faces
◦A aplicação correta de Operadores de Euler exige que algumas dessas relações topológicas
se verifiquem previamente
◦A liberdade de aplicação dos operadores é por isso limitada
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 44
Critérios Formais
de Modelação
•Uma teoria formal de Modelação Geométrica
–Um objectivo que ainda não foi alcançado
–Motivações:
◦Só recentemente surgiram sistemas de modelação capazes de verificar automaticamente a
totalidade, validade e unicidade de um modelo
◦Essa verificação torna-se mais complicada para modelos complexos
◦Um modelo válido pode ser um dado de entrada para um sistema que produz
automaticamente alterações desse modelo (caso do CAM)
◦Surgirão um dia sistemas computacionais robóticos que serão capazes de criar e modelar os
objectos do seu próprio ambiente
◦Só com uma teoria formal rigorosa será possível optimizar o processo de modelação no
sentido de obter melhores ferramentas
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 45
Critérios Formais
de Modelação
•Características geométricas de um sólido “físico”
–Forma: definida pelo conjunto espacial de pontos que o compõe
–Superfície: um subconjunto da forma de um sólido
–Em modelação geométrica a forma é tipicamente:
◦Finita – definida num volume finito
◦Ligada – existe um caminho interno entre dois pontos do interior
–Em modelação geométrica a superfície é:
◦1. Fechada
◦2. Orientável
◦3. Não auto-intersectada
◦4. Finita
◦5. Ligada
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 46
Critérios Formais
de Modelação
•Características geométricas de um sólido “físico”
–Uma superfície “fechada” é suportada por relações topológicas entre os
elementos de uma malha poliédrica na sua superfície
◦Aresta adjacente a duas faces e a dois vértices
◦O nº de arestas e vértices que rodeia uma face é igual
◦O nº de arestas e faces que rodeia um vértice é igual
–Propriedades adicionais a incluir para efeitos de “boa modelação”:
◦6. Rigidez
◦7. Homogeneidade 3D
◦8. Fecho sob movimentos rígidos e algumas operações booleanas
◦9. Descrição finita
◦10. Fronteira determinística
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 47
Critérios Formais
de Modelação
•Propriedades fundamentais de esquemas de modelação
–Domínio: É o poder descritivo de um esquema de representação, i.e., o
conjunto de objetos que o esquema é capaz de modelar
–Validade: É o conjunto de formas válidas de representação que define a
gama de representações do esquema, devendo existir critérios de achar
a validade de um objeto (ou então mostrar que não existe)
–Versatilidade: É a capacidade de responder a uma gama alargada de
análises
–Unicidade: É fundamental na determinação da igualdade entre objetos
–Existem mais (concisão, simplicidade, eficácia, etc.)
PRASC - FUNDAMENTOS DE MODELAÇÃO DE SÓLIDOS 48
Você também pode gostar
- TCIRC - Cap3 - Condensadores e CapacidadeDocumento34 páginasTCIRC - Cap3 - Condensadores e Capacidadebercianaa berAinda não há avaliações
- TCIRC - Cap1 - Grandezas Alternadas SinusoidaisDocumento23 páginasTCIRC - Cap1 - Grandezas Alternadas Sinusoidaisbercianaa berAinda não há avaliações
- TCIRC Cap2 OsciloscópioDocumento34 páginasTCIRC Cap2 Osciloscópiobercianaa berAinda não há avaliações
- PRASC ExercicioOpenSCAD PDFDocumento1 páginaPRASC ExercicioOpenSCAD PDFbercianaa berAinda não há avaliações
- PRASC Casa3 PDFDocumento4 páginasPRASC Casa3 PDFbercianaa berAinda não há avaliações
- PRASC Aula4 PDFDocumento3 páginasPRASC Aula4 PDFbercianaa berAinda não há avaliações
- PRASC Aula4 PDFDocumento3 páginasPRASC Aula4 PDFbercianaa berAinda não há avaliações
- 1.PRASC 1 Fmsol PDFDocumento48 páginas1.PRASC 1 Fmsol PDFbercianaa berAinda não há avaliações
- PRASC Aula2 PDFDocumento2 páginasPRASC Aula2 PDFbercianaa berAinda não há avaliações
- LibreCAD PDFDocumento49 páginasLibreCAD PDFbercianaa ber0% (1)
- 4.PRASC 3 TdicadDocumento17 páginas4.PRASC 3 Tdicadbercianaa berAinda não há avaliações
- LibreCAD PDFDocumento49 páginasLibreCAD PDFbercianaa ber0% (1)
- 3.PRASC 2 Cmsol BDocumento26 páginas3.PRASC 2 Cmsol Bbercianaa berAinda não há avaliações
- 2.PRASC 2 Cmsol ADocumento26 páginas2.PRASC 2 Cmsol Abercianaa berAinda não há avaliações
- Tabela Laje IsoporDocumento4 páginasTabela Laje IsoporLgSalgadoAinda não há avaliações
- Algumas Nocoes de Logica (Antonio Anibal Padrao)Documento7 páginasAlgumas Nocoes de Logica (Antonio Anibal Padrao)Paola Rezende SchettertAinda não há avaliações
- Aula 3 - Funções ElementaresDocumento11 páginasAula 3 - Funções ElementaresExpainAinda não há avaliações
- Termodinamica Q Geral-Parte1aDocumento48 páginasTermodinamica Q Geral-Parte1avito xxxAinda não há avaliações
- 5 Lista Sobre Transformações Lineares 2Documento1 página5 Lista Sobre Transformações Lineares 2Jardson SilvaAinda não há avaliações
- Atividade de Razão e ProporçãoDocumento6 páginasAtividade de Razão e ProporçãoSantos SilvaAinda não há avaliações
- Apostila 08 Estruturas de Decisão em Java Documento PDFDocumento5 páginasApostila 08 Estruturas de Decisão em Java Documento PDFAnderson Marques NetoAinda não há avaliações
- Apostila de Matemática Financeira - 2020Documento46 páginasApostila de Matemática Financeira - 2020Carlos André JesusAinda não há avaliações
- Seminário.. FísicaDocumento8 páginasSeminário.. FísicaVasco Joaquim MhulaAinda não há avaliações
- O DIVÃ DO POBRE - Por Félix Guattari (Psicanálise e Cinema)Documento7 páginasO DIVÃ DO POBRE - Por Félix Guattari (Psicanálise e Cinema)Igor Capelatto IacAinda não há avaliações
- 1º Atividade Engenharia AlunosDocumento3 páginas1º Atividade Engenharia AlunosEzequiel BorgesAinda não há avaliações
- Teste Mat 5ºDocumento5 páginasTeste Mat 5ºmonica melo100% (1)
- Trigonometria Primeiro AnoDocumento8 páginasTrigonometria Primeiro AnoTHIAGO MILLER CASTELO BRANCO DE OLIVEIRAAinda não há avaliações
- Mma10 2 RecdomDocumento28 páginasMma10 2 RecdomGonçaloFerreiraAinda não há avaliações
- C7geotopo PDFDocumento22 páginasC7geotopo PDFSteven CannonAinda não há avaliações
- Cálculo I Resumo P3.1Documento37 páginasCálculo I Resumo P3.1oieboyswAinda não há avaliações
- Questão 1Documento2 páginasQuestão 1Lucas MateusAinda não há avaliações
- Seduc 2014 Prova GabaritadaDocumento11 páginasSeduc 2014 Prova GabaritadaLennaXtiAinda não há avaliações
- 6ano Matematica Avaliacao DiagnosticaDocumento4 páginas6ano Matematica Avaliacao DiagnosticaPaula CatroAinda não há avaliações
- Descritor 3 9c2b0 Ano Parte 1Documento2 páginasDescritor 3 9c2b0 Ano Parte 1Vanessa Michele Boasczik WilleAinda não há avaliações
- 1 Prova 6º AnoDocumento3 páginas1 Prova 6º AnoGabryelly MachadoAinda não há avaliações
- Análise de Vida em Motores de Tração de Corrente Contínua Das Locomotivas Na EFVMDocumento70 páginasAnálise de Vida em Motores de Tração de Corrente Contínua Das Locomotivas Na EFVMluxo01100% (1)
- Experimento 02 - Pêndulo FísicoDocumento8 páginasExperimento 02 - Pêndulo FísicoVanessa PenedaAinda não há avaliações
- Mat BDocumento4 páginasMat BdanrobsonAinda não há avaliações
- Teste 1 Serie A-Inf 3ºbimDocumento2 páginasTeste 1 Serie A-Inf 3ºbimladianeAinda não há avaliações
- Capitulo 2-Pratique em CasaDocumento13 páginasCapitulo 2-Pratique em CasaHerbert AquinoAinda não há avaliações
- Padrão para Escadas Segundo IT-08 Do CBM-MG, ISO 14122, NR-12 e NBR 9077Documento1 páginaPadrão para Escadas Segundo IT-08 Do CBM-MG, ISO 14122, NR-12 e NBR 9077patricschurhaus100% (6)
- Apostila Professor GuilhermeDocumento96 páginasApostila Professor Guilhermeale403Ainda não há avaliações
- Relatório Sedimentação - LADEQ - Grupo 5Documento13 páginasRelatório Sedimentação - LADEQ - Grupo 5maria beatrizAinda não há avaliações
- Exercicio 1.1Documento2 páginasExercicio 1.1Juquinha100% (1)