Você também pode gostar
- Solmig 320S - 370-470Documento16 páginasSolmig 320S - 370-470ARNALDO ALEXANDRE FILHO100% (5)
- Van Valkenburgh, Nooger & Neville, INC. - Eletricidade Básica. 3-Livraria Freitas Bastos (1960) PDFDocumento133 páginasVan Valkenburgh, Nooger & Neville, INC. - Eletricidade Básica. 3-Livraria Freitas Bastos (1960) PDFRaul100% (2)
- Sistemas Elétricos Djalma CaselatoDocumento146 páginasSistemas Elétricos Djalma CaselatoMabelle Cristina100% (1)
- QuestoesDocumento6 páginasQuestoesKaline Oliveira100% (2)
- Apresentação TCC UFPA - Universidade Federal Do ParáDocumento22 páginasApresentação TCC UFPA - Universidade Federal Do ParáYago GomesAinda não há avaliações
- Cálculo para Determinação de Energia IncidenteDocumento13 páginasCálculo para Determinação de Energia IncidenteRogério JamasAinda não há avaliações
- GTEC PortuguesDocumento118 páginasGTEC PortuguesGilberto Nunes Dualdo Junior89% (19)
- Ciclo de Quatro TemposDocumento4 páginasCiclo de Quatro TemposKaline OliveiraAinda não há avaliações
- Inversor de Frequência: 20 Hrs João FilhoDocumento56 páginasInversor de Frequência: 20 Hrs João FilhoKaline OliveiraAinda não há avaliações
- Projeto CompletoDocumento7 páginasProjeto CompletoKaline Oliveira100% (1)
- Injetor de Sinais Com o 555 CompletoDocumento6 páginasInjetor de Sinais Com o 555 CompletoRodnei Santos100% (1)
- Eletridinâmica (3ºmodelo) - EnemDocumento21 páginasEletridinâmica (3ºmodelo) - EnemCláudio Luiz LanaAinda não há avaliações
- Ementa Eletrotécnica CEFET RJ PDFDocumento13 páginasEmenta Eletrotécnica CEFET RJ PDFYvonne ChenAinda não há avaliações
- Reatório Calculo de RedesDocumento8 páginasReatório Calculo de Redessamuelmedeiros74123Ainda não há avaliações
- Relatório Laboratório de Circuitos Eletricos - 3° Aula PraticaDocumento7 páginasRelatório Laboratório de Circuitos Eletricos - 3° Aula Pratica-Cold-Ainda não há avaliações
- Relatorio Eletronica DigitalDocumento11 páginasRelatorio Eletronica DigitalVinicius CostaAinda não há avaliações
- Controlador PIDDocumento27 páginasControlador PIDcmgobboAinda não há avaliações
- Caderno EAOEAR 2023 - Versão A - Engenharia ElétricaDocumento32 páginasCaderno EAOEAR 2023 - Versão A - Engenharia ElétricapedroAinda não há avaliações
- Resolução - Ficha de Diagnóstico 11º Ano Física e Química ADocumento5 páginasResolução - Ficha de Diagnóstico 11º Ano Física e Química AKim SunheeAinda não há avaliações
- Grandezas EletricasDocumento35 páginasGrandezas EletricasGilmar FerrettiAinda não há avaliações
- Multímetro Digital ET-2042F: Manual de InstruçõesDocumento32 páginasMultímetro Digital ET-2042F: Manual de InstruçõesManoel MartinsAinda não há avaliações
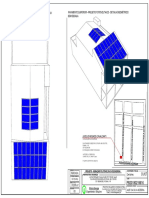
- 038-018-Pe-Ele-Vista 3D - R00Documento1 página038-018-Pe-Ele-Vista 3D - R00edeAinda não há avaliações
- Visao Geral Sobre Monitores de LCD PDFDocumento3 páginasVisao Geral Sobre Monitores de LCD PDFAntonio Carlos CardosoAinda não há avaliações
- Hidraulica Proporcional SenaiDocumento51 páginasHidraulica Proporcional SenaieullerAinda não há avaliações
- Teo C.problemasEE EMS1Documento5 páginasTeo C.problemasEE EMS1Lopes Fernando Seabra BoaAinda não há avaliações
- Simulado Avionica - AnacDocumento93 páginasSimulado Avionica - AnacCarlyson Silva100% (1)
- Integrador PDFDocumento3 páginasIntegrador PDFJunior PletschAinda não há avaliações
- (Eaoear2018) (A) (Eletrica)Documento28 páginas(Eaoear2018) (A) (Eletrica)Ícaro AndréAinda não há avaliações
- Apostila de FísicaDocumento24 páginasApostila de FísicaAna LetíciaAinda não há avaliações
- 2 º Lista de ExercíciosDocumento3 páginas2 º Lista de ExercíciosElton Florentino100% (1)
- Plano de Ensino EletromecânicaDocumento5 páginasPlano de Ensino Eletromecânicadaniel3l100% (1)
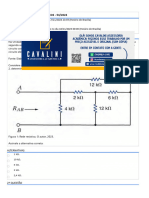
- Atividade 2 - Circuitos Elétricos - 54-2023Documento5 páginasAtividade 2 - Circuitos Elétricos - 54-2023Cavalini Assessoria AcadêmicaAinda não há avaliações
- Cms Files 54701 1683563425apostila Eletrogate - Kit Arduino BeginningDocumento55 páginasCms Files 54701 1683563425apostila Eletrogate - Kit Arduino BeginningJoão LinharesAinda não há avaliações
- Livro IIIDocumento24 páginasLivro IIIEdson QuaresmaAinda não há avaliações